LECTURE № 4
SENSORS AND
SIGNAL PROCESSING. DISPLACEMENT, POSITION AND PROXIMITY SENSORS
4.1. EDDY CURRENT
PROXIMITY SENSORS
Eddy current proximity
sensors are used to detect non-magnetic but conductive materials. They comprise
of a coil, an oscillator, a detector and a triggering circuit. Figure 4.1.1
shows the construction of eddy current proximity switch.
When an alternating current
is passed thru this coil, an alternative magnetic field is generated. If a
metal object comes in the close proximity of the coil, then eddy currents are
induced in the object due to the magnetic field. These eddy currents create
their own magnetic field which distorts the magnetic field responsible for
their generation. As a result, impedance of the coil changes and so the amplitude
of alternating current. This can be used to trigger a switch at some
pre-determined level of change in current.
Eddy current sensors are
relatively inexpensive, available in small in size, highly reliable and have
high sensitivity for small displacements.
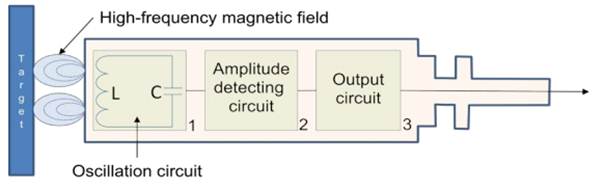
Fig. 4.1.1. Schematic of
Inductive Proximity Sensor
Applications of eddy current
proximity sensors:
·
automation
requiring precise location;
·
machine tool
monitoring;
·
final assembly
of precision equipment such as disk drives;
·
measuring the dynamics
of a continuously moving target, such as a vibrating element;
·
drive shaft
monitoring;
·
vibration
measurements.
Inductive
proximity switch
Inductive proximity switches
are basically used for detection of metallic objects. Figure 4.1.2 shows the
construction of inductive proximity switch. An inductive proximity sensor has
four components; the coil, oscillator, detection circuit and output circuit. An
alternating current is supplied to the coil which generates a magnetic field.
When, a metal object comes closer to the end of the coil,
inductance of the coil changes. This is continuously monitored by a circuit
which triggers a switch when a preset value of inductance change is occurred.
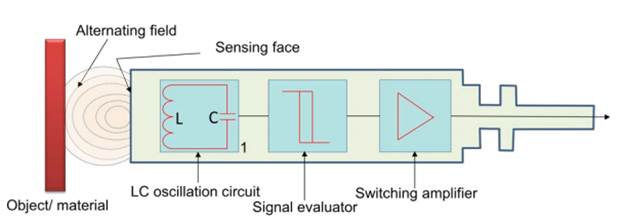
Fig. 4.1.2. Schematic of Inductive Proximity Switch
Applications of inductive
proximity switches:
·
Industrial
automation: counting of products during production or transfer;
·
Security:
detection of metal objects, arms, land mines.
Optical encoders
Optical
encoders provide digital output as a result of linear / angular displacement.
These are widely used in the Servo motors to measure the rotation of shafts.
Figure 4.1.3 shows the construction of an optical encoder.
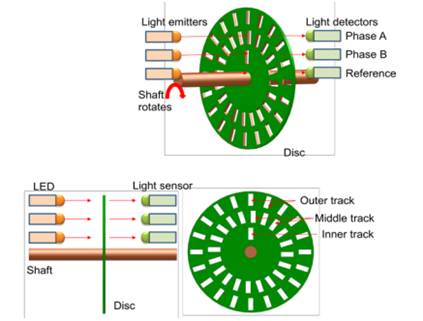
Fig. 4.1.3. Construction
and working of optical encoder
It
comprises of a disc with three concentric tracks of equally spaced holes. Three
light sensors are employed to detect the light passing thru the holes. These
sensors produce electric pulses which give the angular displacement of the
mechanical element e.g. shaft on which the Optical encoder is mounted. The
inner track has just one hole which is used locate the «home» position of the disc. The holes on the middle track offset from the
holes of the outer track by one-half of the width of the hole. This arrangement
provides the direction of rotation to be determined. When the disc rotates in
clockwise direction, the pulses in the outer track lead those in the inner; in
counter clockwise direction they lag behind. The resolution can be determined
by the number of holes on disc. With 100 holes in one revolution, the
resolution would be:
360⁰/100 = 3.6⁰.
Pneumatic
Sensors
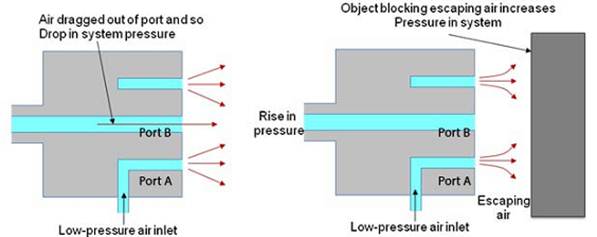
Fig. 4.1.4. Working of
Pneumatic Sensors
Pneumatic sensors are used
to measure the displacement as well as to sense the proximity of an object
close to it. The displacement and proximity are transformed into change in air
pressure. Figure 4.1.4 shows a schematic of construction and working of such a
sensor. It comprises of three ports. Low pressure air is allowed to escape
through port A. In the absence of any obstacle / object, this low pressure air
escapes and in doing so, reduces the pressure in the port B. However when an
object obstructs the low pressure air (Port A), there is rise in pressure in
output port B. This rise in pressure is calibrated to measure the displacement
or to trigger a switch. These sensors are used in robotics, pneumatics and for
tooling in CNC machine tools.
Proximity
Switches
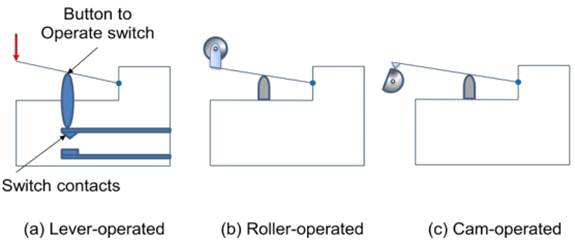
Fig. 4.1.5. Configurations
of contact type proximity switch
Figure 4.1.5 shows a number
of configurations of contact-type proximity switch being used in manufacturing
automation. These are small electrical switches which require physical contact
and a small operating force to close the contacts.They are basically employed
on conveyor systems to detect the presence of an item on the conveyor belt.
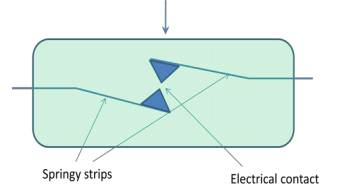
Fig. 4.1.6. Reed Switch
Magnet based Reed switches
are used as proximity switches. When a magnet attached to an object brought
close to the switch, the magnetic reeds attract to each other and close the
switch contacts. A schematic is shown in Figure 4.1.6.
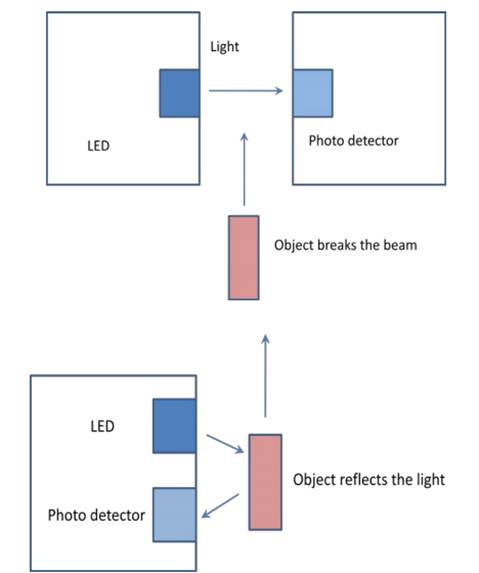
Fig. 4.1.7. LED based
proximity sensors
Photo emitting devices such
as Light emitting diodes (LEDs) and photosensitive devices such as photo diodes
and photo transistors are used in combination to work as proximity sensing
devices. Figure 4.1.7 shows two typical arrangements of LEDs and photo diodes
to detect the objects breaking the beam and reflecting light.
Hall effect
sensor
Figure 4.1.8 shows the
principle of working of Hall effect sensor. Hall effect sensors work on the
principle that when a beam of charge particles passes through a magnetic field,
forces act on the particles and the current beam is deflected from its straight
line path. Thus one side of the disc will become negatively charged and the
other side will be of positive charge. This charge separation generates a potential
difference which is the measure of distance of magnetic field from the disc
carrying current.
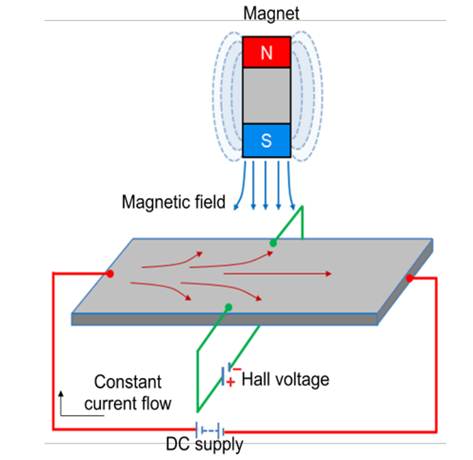
Fig. 4.1.8. Principle of
working of Hall effect sensor
The typical application of
Hall effect sensor is the measurement of fluid level in a container. The
container comprises of a float with a permanent magnet attached at its top. An
electric circuit with a current carrying disc is mounted in the casing.
When the fluid level
increases, the magnet will come close to the disc and a potential difference
generates. This voltage triggers a switch to stop the fluid to come inside the
container.
These sensors are used for
the measurement of displacement and the detection of position of an object.
Hall effect sensors need necessary
signal conditioning circuitry. They can be operated at 100 kHz. Their
non-contact nature of operation, good immunity to environment contaminants and ability to sustain in severe conditions
make them quite popular in industrial automation.
1.1.
VELOCITY, MOTION, FORCE AND PRESSURE SENSORS
Tachogenerator
Tachogenerator works on the
principle of variable reluctance. It consists of an assembly of a toothed wheel
and a magnetic circuit as shown in figure 4.2.1. Toothed wheel is mounted on
the shaft or the element of which angular motion is to be measured. Magnetic
circuit comprising of a coil wound on a ferromagnetic material core. As the
wheel rotates, the air gap between wheel tooth and magnetic core changes which
results in cyclic change in flux linked with the coil. The alternating emf generated
is the measure of angular motion. A pulse shaping signal conditioner is used to
transform the output into a number of pulses which can be counted by a counter.
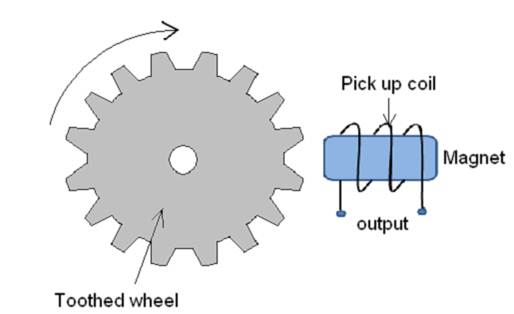
Fig. 4.2.1. Principle of
working of Techogenerator
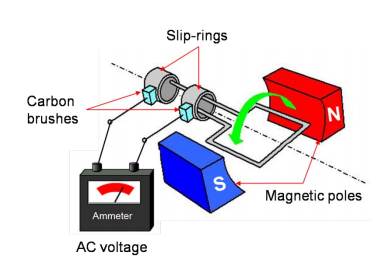
Fig. 4.2.2. Construction and
working of AC generator
An alternating current (AC)
generator can also be used as a
techognerator. It comprises of rotor coil which rotates with the shaft. Figure
2.4.2 shows the schematic of AC generator. The rotor rotates in the magnetic
field produced by a stationary permanent magnet or electromagnet. During this
process, an alternating emf is produced which is the measure of the angular
velocity of the rotor. In general, these sensors exhibit nonlinearity error of
about ± 0.15% and are employed for the rotationsup to about 10000 rev/min.
Pyroelectric sensors
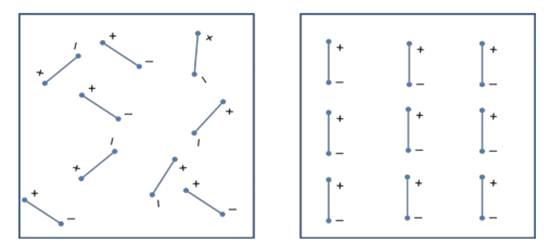
Fig. 4.2.3. Principle of
pyroelectricity
These sensors work on the
principle of pyroelectricity, which states that a crystal material such as
Lithium tantalite generates charge in
response to heat flow. In presence of an
electric field, when such a crystal material heats up, its electrical dipoles
line up as shown in figure 4.2.3. This is called as polarization. On cooling,
the material retains its polarization. In absence of electric field, when this
polarized material is subjected to infra red irradiation, its polarization
reduces. This phenomenon is the measure of detection of movement of an object.
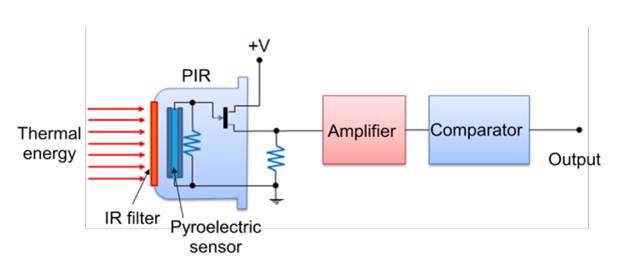
Fig. 4.2.4. Construction and
working a Pyroelectric sensor
Pyroelectric sensor comprises
of a thick element of polarized material coated with thin film electrodes on
opposite faces as shown in figure 4.2.4. Initially the electrodes are in
electrical equilibrium with the polarized material. On incident of infra red,
the material heats up and reduces its polarization. This leads to charge
imbalance at the interface of crystal and electrodes. To balance this disequilibrium, measurement circuit supplies
the charge, which is calibrated against the detection of an object or its
movement.
Applications of Pyroelectric
sensors:
·
Intrusion
detector;
·
Optothermal
detector;
·
Pollution
detector;
·
Position sensor;
·
Solar cell
studies;
·
Engine analysis.
Strain Gauge as
force Sensor
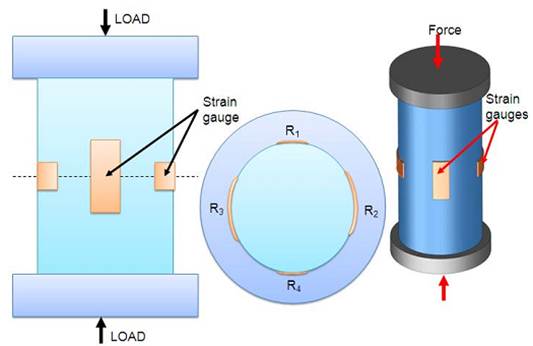
Fig. 4.2.5. Strain gauge
based Load cell
Strain gauge based sensors
work on the principle of change in electrical resistance. When, a mechanical
element subjects to a tension or a compression the electric resistance of the
material changes. This is used to measure the force acted upon the element.
Figure 4.2.5 shows a strain gauge load cell. It comprises of
cylindrical tube to which strain gauges are attached. A load applied on the top
collar of the cylinder compress the strain gauge element which changes its
electrical resistance. Generally strain gauges are used to measure forces up to
10 MN. The non-linearity and repeatability errors of this transducer are ±0.03%
and ±0.02% respectively.
Fluid pressure
Chemical, petroleum, power
industry often need to monitor fluid pressure. Various types of instruments
such as diaphragms, capsules, and bellows are used to monitor the fluid
pressure. Specially designed strain gauges doped in diaphragms are generally
used to measure the inlet manifold pressure in applications such as
automobiles. A typical arrangement of strain gauges on a diaphragm is shown in
figure 4.2.6. Application
of pressurized fluid displaces the diaphragm. This displacement is measured by
the stain gauges in terms of radial and/or lateral strains. These strain gauges
are connected to form the arms of a Wheatstone bridge.
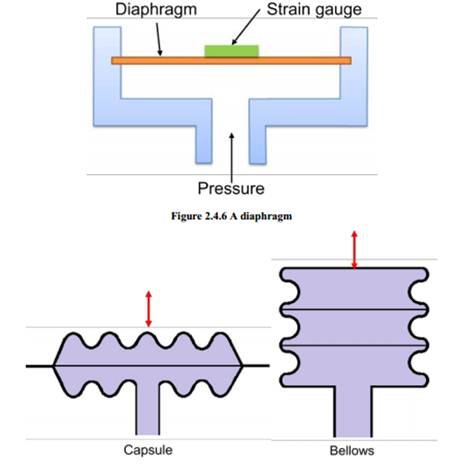
Fig. 4.2.6. Schematic of
Capsule and Bellow
Capsule is formed by
combining two corrugated diaphragms. It has enhanced sensitivity in comparison with that of diaphragms.
Figure 2.4.7 shows a schematic of a Capsule and a Bellow. A stack of capsules
is called as «Bellows». Bellows with a LVDT sensor measures the fluid
pressure in terms of change in resultant voltage across the secondary coils of
LVDT.
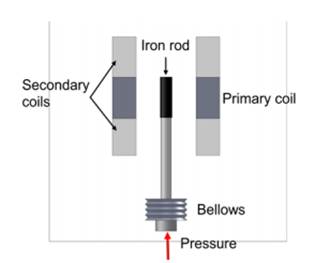
Fig. 4.2.7. Bellow with a
LVDT
Figure 2.4.8 shows a typical
arrangement of the same.
Tactile sensors
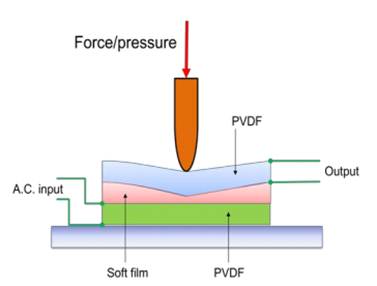
Fig. 4.2.8. Schematic of a
tactile sensor
In general, tactile sensors
are used to sense the contact of fingertips of a robot with an object. They are
also used in manufacturing of ‘touch display’ screens of visual display units
(VDUs) of CNC machine tools. Figure 2.4.9 shows the construction of piezo-electric
polyvinylidene fluoride (PVDF) based tactile sensor. It has two PVDF layers
separated by a soft film which transmits the vibrations. An alternating current
is applied to lower PVDF layer which generates vibrations due to reverse
piezoelectric effect. These vibrations are transmitted to the upper PVDF layer
via soft film. These vibrations cause alternating voltage across the upper PVDF
layer. When some pressure is applied on the upper PVDF layer the vibrations
gets affected and the output voltage changes. This triggers a switch or an
action in robots or touch displays.
Piezoelectric
sensor
Piezoelectric sensor is used
for the measurement of pressure, acceleration and dynamic-forces such as
oscillation, impact, or high speed compression or tension. It contains
piezoelectric ionic crystal materials such as Quartz (Figure 4.2.9). On
application of force or pressure these materials get stretched or compressed.
During this process, the charge over the material changes and redistributes.
One face of the material becomes positively charged and the other negatively
charged. The net charge q on the surface is proportional to the amount x by
which the charges have been displaced. The displacement is proportion to force.
Therefore we can write:
q = kx = SF (2.2.1)
where k is constant and S is a constant termed the
charge sensitivity.
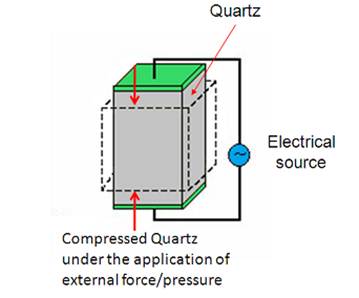
Fig. 4.2.9. Principle of
working of Piezoelectric sensor
Liquid flow
Liquid flow is generally
measured by applying the Bernoulli’s principle of fluid flow through a
constriction. The quantity of fluid flow is computed by using the pressure drop
measured. The fluid flow volume is proportional to square root of pressure
difference at the two ends of the constriction. There are various types of
fluid flow measurement devices being used in manufacturing automation such as
Orifice plate, Turbine meter etc.
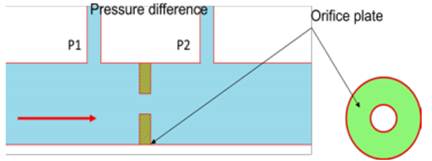
Fig. 4.2.10. Orifice Plate
Figure 4.2.10 shows a
schematic of Orifice plate device. It has a disc with a hole at its center,
through which the fluid flows. The pressure difference is measured between a
point equal to the diameter of the tube upstream and a point equal to the half
the diameter downstream. Orifice plate is inexpensive and simple in
construction with no moving parts. It exhibits nonlinear behavior and does not
work with slurries. It has accuracy of ± 1.5%
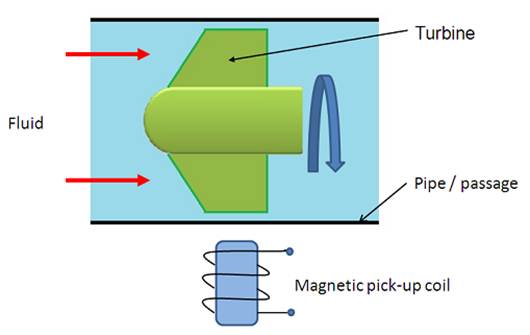
Fig. 4.2.11. Schematic of
turbine meter
Turbine flow meter has an
accuracy of ±0.3%. It has a multi blade rotor mounted centrally in the pipe
along which the flow is to be measured. Figure 4.2.11 shows the typical
arrangement of the rotor and a magnetic pick up coil. The fluid flow rotates
the rotor. Accordingly the magnetic pick up coil counts the number of magnetic
pulses generated due to the distortion of magnetic field by the rotor blades.
The angular velocity is proportional to the number of pulses and fluid flow is
proportional to angular velocity.
Fluid level
The level of liquid in a
vessel or container can be measured:
a)
directly by
monitoring the position of liquid surface;
b)
indirectly by
measuring some variable related to the height.
Direct measurements involve
the use of floats however the indirect methods employ load cells.
Potentiometers or LVDT sensors can be used along with the floats to measure the
height of fluid column. Force sensed by the load cells is proportional to the
height of fluid column.
1.2.
TEMPERATURE AND LIGHT SENSORS
Temperature conveys the
state of a mechanical system in terms of expansion or contraction of solids,
liquids or gases, change in electrical resistance of conductors, semiconductors
and thermoelectric emfs. Temperature sensors such as bimetallic strips, thermocouples,
thermistors are widely used in monitoring of manufacturing processes such as
casting, molding, metal cutting etc. The construction details and principle of
working of some of the temperature sensors are discussed in following sections.
Bimetallic
strips
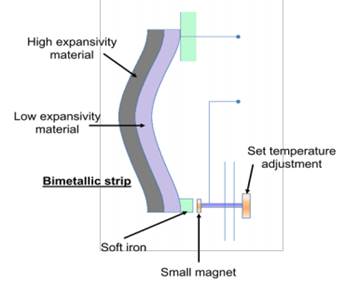
Fig. 4.3.1. Construction
and working of Bi-metallic strip
Bimetallic strips are used
as thermal switch in controlling the temperature or heat in a manufacturing
process or system. It contains two different metal strips bonded together. The
metals have different coefficients of expansion. On heating the strips bend
into curved strips with the metal with higher coefficient of expansion on the
outside of the curve. Figure 4.3.1 shows a typical arrangement of a bimetallic
strip used with a setting-up magnet. As the strips bend, the soft iron comes in
closer proximity of the small magnet and further touches. Then the electric
circuit completes and generates an alarm. In this way bimetallic strips help to
protect the desired application from heating above the pre-set value of
temperature.
Figure 4.3.1 shows the
construction of a RTD. It has a resistor element connected to a Wheatstone
bridge. The element and the connection leads are insulated and protected by a
sheath. A small amount of current is continuously passing though the coil. As
the temperature changes the resistance of the coil changes which is detected at
the Wheatstone bridge.
RTDs are used in the form of
thin films, wire wound or coil. They are generally made of metals such as platinum,
nickel or nickel-copper alloys. Platinum wire held by a high-temperature glass
adhesive in a ceramic tube is used to measure the temperature in a metal
furnace. Other applications are:
·
air conditioning
and refrigeration servicing;
·
food processing;
·
stoves and
grills;
·
textile
production;
·
plastics
processing;
·
petrochemical
processing;
·
micro
electronics;
·
air, gas and
liquid temperature measurement in pipes and tanks;
·
exhaust gas
temperature measurement.
Thermistors
Thermistors follow the
principle of decrease in resistance with increasing temperature. The material
used in thermistor is generally a semiconductor material such as a sintered
metal oxide (mixtures of metal oxides, chromium, cobalt, iron, manganese and
nickel) or doped polycrystalline ceramic containing barium titanate (BaTiO3)
and other compounds. As the temperature of semiconductor material increases the number of electrons
able to move about increases which results in more current in the material and
reduced resistance. Thermistors are rugged and small in dimensions. They
exhibit nonlinear response characteristics. Thermistors are available in the
form of a bead (pressed disc), probe or chip. Figure 4.3.2 shows the
construction of a bead type thermistor. It has
a small bead of dimension from 0.5 mm to 5 mm coated with ceramic or
glass material. The bead is connected to an electric circuit through two leads.
To protect from the environment, the leads are contained in a stainless steel
tube.
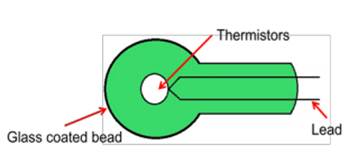
Fig. 4.3.2. Schematic of a
thermistor
Applications of Thermistors:
·
To monitor the
coolant temperature and/or oil temperature inside the engine;
·
To monitor the
temperature of an incubator;
·
Thermistors are
used in modern digital thermostats;
·
To monitor the
temperature of battery packs while charging;
·
To monitor
temperature of hot ends of 3D printers;
·
To maintain
correct temperature in the food handling and processing industry;
·
Equipments;
·
To control the
operations of consumer appliances such as toasters, coffee makers, refrigerators,
freezers, hair dryers, etc.
Light sensors
A light sensor is a device
that is used to detect light. There are different types of light sensors such
as photocell/photoresistor and photo diodes being used in manufacturing and
other industrial applications. Photoresistor is also called as light dependent
resistor (LDR). It has a resistor whose resistance decreases with increasing
incident light intensity. It is made of a high resistance semiconductor
material, cadmium sulfide (CdS). The resistance of a CdS photoresistor varies
inversely to the amount of light incident upon it. Photoresistor follows the
principle of photoconductivity which results from the generation of mobile
carriers when photons are absorbed by the semiconductor material.
Figure 4.3.3 shows the
construction of a photo resistor. The CdS resistor coil is mounted on a ceramic
substrate. This assembly is encapsulated by a resin material. The sensitive
coil electrodes are connected to the control system though lead wires.On
incidence of high intensity light on the electrodes, the resistance of resistor
coil decreases which will be used further to generate the appropriate signal by
the microprocessor via lead wires.
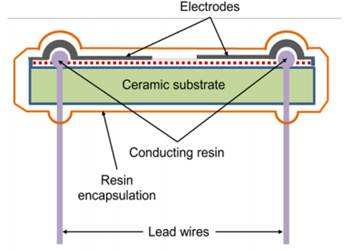
Fig. 4.3.3. Construction of
a photo resistor
Photoresistors are used in
science and in almost any branch of industry for control, safety, amusement,
sound reproduction, inspection and measurement.
Applications of photo
resistor:
·
computers,
wireless phones, and televisions, use ambient light sensors to automatically control
the brightness of a screen;
·
barcode scanners
used in retailer locations work using light sensor technology;
·
in space and
robotics: for controlled and guided motions of vehicles and robots. the light sensor
enables a robot to detect light. robots can be programmed to have a specific
reaction if a certain amount of light is detected;
·
auto flash for
camera;
·
industrial
process control.
Photo diodes
Photodiode is a solid-state
device which converts incident light into an electric current. It is made of
Silicon. It consists of a shallow diffused p-n junction, normally a p-on-n
configuration. When photons of energy greater than 1.1eV (the bandgap of
silicon) fall on the device, they are absorbed and electron-hole pairs are
created. The depth at which the photons are absorbed depends upon their energy.
The lower the energy of the photons, the deeper they are absorbed. Then the
electron-hole pairs drift apart. When the minority carriers reach the junction,
they are swept across by the electric field and an electric current
establishes.
Photodiodes are one of the
types of photodetector, which convert light into either current or voltage.
These are regular semiconductor diodes except that they may be either exposed
to detect vacuum UV or X-rays or packaged with a opening or optical fiber
connection to allow light to reach the sensitive part of the device.
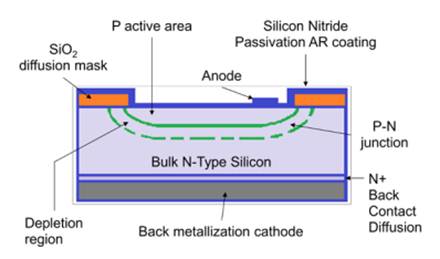
Fig. 4.3.4. Construction of
photo diode detector
Figure 4.3.4 shows the construction of Photo diode detector. It is
constructed from single crystal silicon wafers. It is a p-n junction device.
The upper layer is p layer. It is very thin and formed by thermal diffusion or
ion implantation of doping material such as boron. Depletion region is narrow
and is sandwiched between p layer and bulk n type layer of silicon. Light
irradiates at front surface, anode, while the back surface is cathode. The
incidence of light on anode generates a flow of electron across the p-n junction
which is the measure of light intensity.
Applications of
photo diodes
Camera: Light
Meters, Automatic Shutter Control, Auto-focus, Photographic Flash Control.
Medical: CAT
Scanners – X ray
Detection, Pulse Oximeters, Blood Particle Analyzers.
Industry:
·
Bar Code
Scanners;
·
Light Pens;
·
Brightness
Controls;
·
Encoders;
·
Position Sensors;
·
Surveying
Instruments;
·
Copiers – Density of Toner.

