LABORATORY WORK № 13
INVESTIGATION OF STEPPER
MOTOR. RESONANCE
13.1. Objectives
Analyze characteristics of stepper motor using different connection and
control modes.
13.2. Task
Use experimental investigation to obtain maximum rotation speed and
other characteristics of different stepper motor connection modes – unipolar
and bipolar. Test and examine successive control modes:
·
full step;
·
wave;
·
half step;
·
break.
13.3. Resonance
At specific step
rates stepper motors often experience an undesired reaction called resonance.
The indications are a sudden loss of torque with possible skipped steps and
loss of synchronization. Resonance is inherent in the design and operation of
all step-ping motors. Slow stepping rates combined with high rotor inertia and
elevated torque produce ringing as the rotor overshoots its de-sired angular
displacement and is pulled back into position. Resonance arises when the step
rate coincides with rotor ringing, typically about 100 to 200 steps/sec. Unable
to overcome the combined effects of both load inertia and ringing, the motor
skips steps and loses torque and synchronization. The resonant frequency of the
stepper motor rotor depends on the amplitude of the oscillation, but as the
amplitude decreases, the resonant frequency rises to a well-defined
small-amplitude frequency. This frequency depends on the step angle and on the
ratio of the holding torque to the moment of inertia of the rotor. Either a
higher torque or a lower moment will increase the frequency. Formally, the
small-amplitude resonance can be computed as follows: First, recall Newton’s
law for angular acceleration:
![]() (13.1)
(13.1)
where: T –
torque applied to rotor; µ – moment
of inertia of rotor and load, A –
angular acceleration [rad/s]. For small amplitudes, the torque on the rotor can
be approximated as a linear function of the displacement from the equilibriun
position. Therefore, Hooke’s law is applied:
![]() (13.2)
(13.2)
where: k –
the «spring constant» of the system, in torque units per radian; ![]() – angular position of rotor [rad].
– angular position of rotor [rad].
From (13.1) and (13.2) is solution of the resonant frequency f as
function of k and µ is:
 (13.3)
(13.3)
It is very
important, that moment of inertia of the rotor plus any coupled load matters,
so the resonant frequency depends on the load. In practice, this oscillation
can cause significant problems when stepping rate is anywhere near a resonant
frequency of the system – random and uncontrollable motion can appear.
Changing any one
of the three parameters – inertia load, step rate, or torque – will reduce or
eliminate resonance. As a practical matter, only torque is the easiest to
change using a technique called micro-stepping. Micro-stepping applies power to the stator windings of the
mo-tor in incremental steps. Torque builds slowly reducing overshoot and
canceling resonance.
Time Constant
Because of motor
winding inductance, the current will not increase or decrease instantaneously.
If a voltage V is connected to a
winding with the resistance Rand inductance L,
the current in-creases exponentially:
![]()
![]() (13.4)
(13.4)
Value L / R
is called time constant and indicates time needed for the current to rise up to
63 % of the final value i = V / R.
For the equipment motor with R = 2.5
and L = 8 mH used in laboratory the time constant τ = L / R = 3.2 ms. It means, the step switching
frequency is limited to about 200 steps per second. There is a way to increase
maximal rotation speed: time constant τ
can be decreased sing additional series connected resistor (increasing R) and accord ingly increased supply
voltage to reach the normal motor current. If the 10 resistor added and supply
voltage increased to 25 V, τ = 0.64
ms, and 1000 steps per second speed
can be reached.
The Workflow
The laboratory
equipment for the stepper motor investigation – TERCO SD1664-1 Stepper motor
trainer is shown in Fig. 13.1. It consists of a motor block with adjustable
load on the left, and control block in the centre. Closer view of control
measurement part is presented in Fig. 13.2. The oscilloscope for voltage form
monitoring and voltmeter for coil current measurement are necessary.

Fig. 13.1. Stepper motor TERCO SD1664-1
Measurement equipment
connection
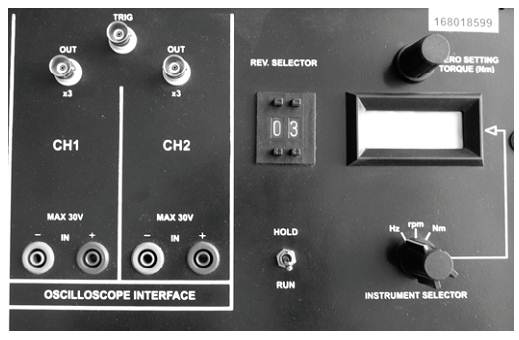
Fig. 13.2. Measurement part of stepper motor train
13.4. Method of testing
Maximum
pull-in, pull-out and torque characteristic measurement.
1.
Set «Speed» potentiometer to the minimum value. Turn down the adjusting screw until
the braking cord is loose. Switch «Instrument selector» to torque mode (Nm), adjust zero on display by «Zero setting torque» potentiometer (Fig. 13.1).
2.
Switch «Instrument selector» to frequency mode (Hz), select «Unipolar» in driver section and «Normal» in «Program selector».
3. Start the motor at very low speed, stop and restart
the motor (use the Hold/Run switch). Increase the frequency until the motor
does not start properly and write the frequency value into table 13.1.
4.
Adjust three
different torque values in range 0 – 1 Nm, and re-peat procedure 3.
5.
Repeat steps 3
and 4 for bipolar mode.
6.
Repeat steps 3 – 5 using one and
two additional weights on motor shaft, fill in the results into table 13.1.
7.
Measure the
maximum pull-in torque: loose the braking cord; select «Unipolar» in driver section and «Normal» in «Program selector»; set the operational frequency 20 Hz; increase the
torque and try to restart the motor. Proceed until the motor cannot start, and
write down the obtained torque value in table 13.2.
8.
Repeat step 7
for 50 Hz, 100 Hz, 200 Hz, 400 Hz, 600 Hz and 800 Hz operational frequency and
write down the data in table 13.2.
9.
Repeat steps 7
and 8 using bipolar conection mode.
10. Measure the maximum pull-out torque: loose the braking
cord; select «Unipolar» in driver section and «Normal» in «Program selector»; set the operational frequency 20 Hz; run the motor and
increase the torque. Proceed until the motor stops, and write down the obtained
torque value in table 13.2.
11. Repeat step 10 for 50 Hz, 100 Hz, 200 Hz, 400 Hz, 600
Hz and 800 Hz operational frequency and write down the data in table 13.2.
12. Repeat steps 10 and 11 using bipolar conection mode.
Table 13.1.
The maximum pull-out rate
|
Weight No |
Load, Nm |
Frequency, Nz |
|
|
|
|
Unipolar |
Bipolar |
|
|
|
|
|
Table 13.2.
The maximum pull-in and
pull-out torq
|
Mode |
Maximum torque, Nm |
||||||
|
20 Hz |
50 Hz |
100 Hz |
200 Hz |
400 Hz |
600 Hz |
800 Hz |
|
|
Pull-in unipolar |
|
|
|
|
|
|
|
|
Pull-in bipolar |
|
|
|
|
|
|
|
|
Pull-out unipolar |
|
|
|
|
|
|
|
|
Pull-out bipolar |
|
|
|
|
|
|
|
13.5.
Content of Report
1.
Objective, task and motor parameters of the laboratory work.
2.
Work results for Experiment 1 – table with maximum rotation speed achieved
using different connection and control modes; control pulse and coil voltage
oscillograms, coil current de-pendence from pulse frequency for the offered
control mode, ramping diagram.
3.
Work results for
Experiment 2: maximum pull-out, resonance and maximum pull-in frequency values
for both unipolar and bipolar connection modes of unloaded motor and with
addition-al load.
4.
Work results for
Experiment 3: maximum pull-in and pull-out rates (Table 13.1) and torques
(Table 13.2) for different operation modes.
5.
Conclusions.
13.6. Control questions
1.
Enumerate
advantages and drawbacks of stepper motors.
2.
What are the
main connection types for stepper motors?
3.
How do the
parameters depend on connection type?
4.
What are control
modes for stepper motors?
5.
What control
mode can achieve maximum rotation speed?
6.
What is the
speed resonance and how to avoid it?
7.
What is the
back-phasing mode?
8.
Explain the ramp
mode using the diagram.
9.
How to find the
maximum pull-in and pull-out frequency?
10. How to find the maximum pull-in and pull-out torque?

