LABORATORY WORK № 12
CONNECTION TYPES
12.1.
Objectives
Analyze
characteristics of stepper motor using different connection and control modes.
12.2.
Task
Use experimental
investigation to obtain maximum rotation speed and other characteristics of
different stepper motor connection modes – unipolar and bipolar. Test and
examine successive control modes:
ü
full step
ü
wave
ü
half step
ü
break
12.3.
Connection types
The most popular
hybrid stepper motors usually have two pairs of windings (sometimes for very
precise systems 5 winding motors are used). If these windings have separate
outputs (8 wires), the pole coils can be freely connected in series or
parallel. A series connection provides a high inductance and therefore greater
performance at low speeds. A parallel connection will lower the inductance but
increase the torque at faster speeds.
Otherwise the
windings can be connected in series inside the motor, and 4, 5 or 6 wires
motors (Fig. 12.1) are available. Depending to the wiring, unipolar (Fig. 12.2)
or bipolar (Fig. 12.3) stepper motor connection is possible.
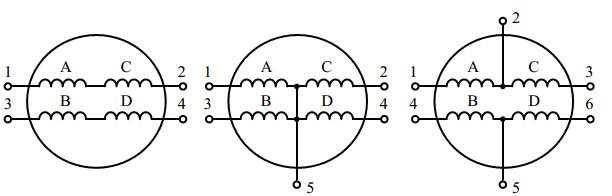
Fig. 12.1. 4, 5 or 6 wire
stepper motor winding connections
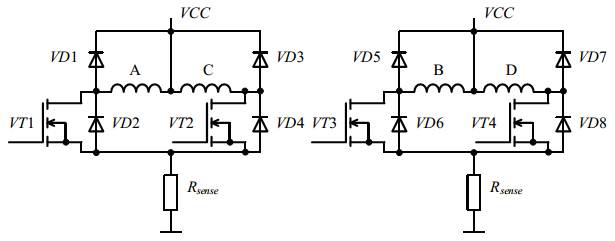
Fig. 12.2. Unipolar
stepper motor connection
The direction of
current flow in unipolar connection (Fig. 12.2) is opposite in sections A and C
of the coil. But one coil from the same pole is on (open VT1 or VT2 for A-C,
and VT3 or VT4 for B-D), and current flow in a particular section of the coil
is always unidirectional. Only 5, 6 or 8 wires motors can be connected
unidirectionally.
Bipolar stepper
motors do not need the centre tap. That makes the motor construction easier,
but it needs a different type of driver circuit, which reverses the current
flow through the entire coil by alternating the polarity of the terminals,
giving us the name «bipolar», and windings can not have the common centre tap
like 5 wire winding connection.
A bipolar motor
is capable of higher torque since the entire coil is energized, not just half.
Let’s look at the mechanism for reversing the voltage across one of the coils,
as shown in Fig. 12.3. This circuit is called an H-bridge, because it resembles
a letter «H». The current can be reversed through the coil by opening the
appropriate transistors. If transistors VT1 and VT4 are open, then the current
flows in one direction, and if transistors VT2 and VT3 are open, then the
current flows in the opposite direction.
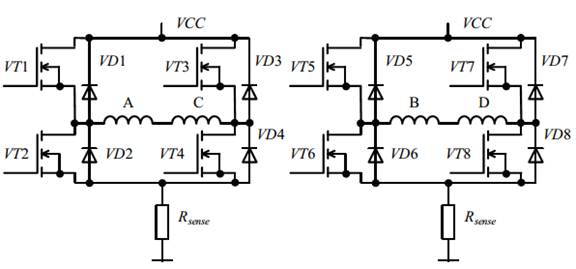
Fig. 12.3. Bipolar
stepper motor connection
Control Modes
Full step (normal, «two phase on») mode
(Fig. 12.4). In this method, both windings of the motor are
always energized. Instead of making one winding off and another on, in
sequence, only the polarity of one winding at a time is changed. With the
current flowing in both windings simultaneously, the rotor aligns itself
between the «average
north» and «average south» magnetic poles. Since both phases are always «ON», this method gives 41.4 % more torque than «One Phase ON» stepping.
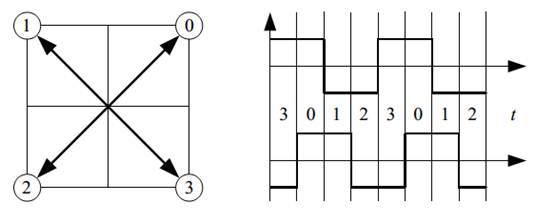
Fig. 12.4.
Full step control mode
Half step mode
(Fig. 12.5). Half step is a combination of full step and wave
modes, the number of steps per rotation is doubled, step size is decreased in
half. Resonant effects can be reduced, but for the same rotation speed the
doubled pulse frequency is needed.
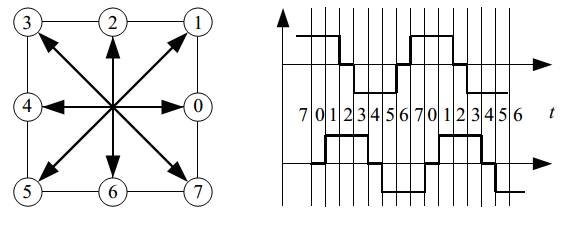
Fig. 12.5. Half step
control mode
Break mode (Back phasing).When operating the motor at
frequencies that are considerably below the time constant, extra pulses can be
supplied in order to improve the rotor positioning. At low stepping rates,
typically below 250 steps/s, the instability due to inherent resonance can be
eliminated by a form of electrical damping called «back phasing». The damping is accomplished by adding a half step
backward to every step forward. After a full step forward, just before the new
position has reached, a half step pulse is given in the opposite direction
causing the rotor to reverse. Before moving backwards another half pulse is not
given in the forward direction. This is the same as to go back to the former
new stable position to lock the rotor there. The break pulse position and
duration is adjust-able. There are drawbacks of this mode: the net torque
decreases, and it is difficult to control the pulse form at higher frequencies.
Usually 250 steps/s is the upper limit for the back phasing usage.
Microstep mode is the
further improvement of half step mode. The coil current can be not only
switched on and off, but can be gradually regulated. Depending to the pole coil
current ratio the intermediate rotor positions can be obtained. The coil
current is equal.
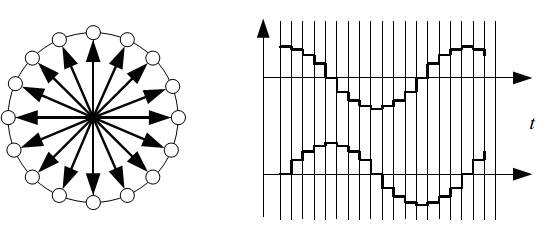
Fig.
12.6. Microstepping with sinusoidal current regulation
To simplify the
regulation and to increase torque is possible using square microstepping
control (Fig. 12.7)
– only one current is regulated per half step, other remains maximum.
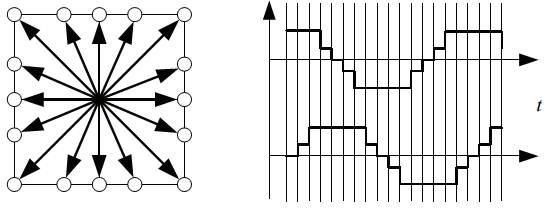
Fig. 12.7. Microstepping
with square (one coil per half step) current regulation
12.4.
Method of testing
Find the Maximum
pull-out, Resonance and Maximum pull-in frequency.
1.
Connect
oscilloscope to windings – CH1 to A1 and A2, CH2 – to B1 and B2, set «Speed» potentiometer to the minimum value.
2.
Switch «Instrument selector» to torque mode (Nm), adjust zero on display by «Zero setting torque» potentiometer (Fig. 12.7).
3.
Switch «Instrument selector» to frequency mode (Hz), select «Unipolar» in driver section and «Normal» in «Program selector». Start the motor.
4. Increase the frequency slowly until the motor starts
to sound differently. The resonance frequency may cause the motor to miss steps
or stall. Monitor and save the curves on oscilloscope, write down the resonant frequency.
5.
Continue
increasing the frequency until the motor finaly stops. Write down the Maximum
pull-out frequency.
6.
Find out the Maximum pull-in
rate. Stop the motor, adjust the frequency and find the value when the motor
cannot be started. Write down this value.
7.
Repeat steps 3 – 6 in Bipolar
mode.
8.
Mount the
additional weight on the motor shaft, and repeat steps 3 – 6. Note the
possibility to find the resonance.
12.5.
Content of Report
1.
Objective, task
and motor parameters of the laboratory work.
2.
Work results for
Experiment 1 – table with maximum rotation speed achieved using different
connection and control modes; control pulse and coil voltage oscillograms, coil
current dependence from pulse frequency for the offered control mode, ramping
diagram.
3.
Work results for
Experiment 2: maximum pull-out, resonance and maximum pull-in frequency values
for both unipolar and bipolar connection modes of unloaded motor and with addition-al
load.
4.
Work results for
Experiment 3: maximum pull-in and pull-out rates (Table 12.1) and torques (Table 12.2) for different operation modes.
5.
Conclusions.
12.6. Control
questions
1.
Enumerate
advantages and drawbacks of stepper motors.
2.
What are the
main connection types for stepper motors?
3.
How do the
parameters depend on connection type?
4.
What are control
modes for stepper motors?
5.
What control
mode can achieve maximum rotation speed?
6.
What is the
speed resonance and how to avoid it?
7.
What is the
back-phasing mode?
8.
Explain the ramp
mode using the diagram.
9.
How to find the
maximum pull-in and pull-out frequency?
10. How to find the maximum pull-in and pull-out torque?

