LABORATORY WORK № 11
INVESTIGATION OF STEPPER
MOTOR
11.1. Objectives
Analyze
characteristics of stepper motor using different connection and control modes.
11.2.
Tasks
Use experimental
investigation to obtain maximum rotation speed and other characteristics of
different stepper motor connection modes – unipolar and bipolar. Test and
examine successive control modes:
·
full step;
·
wave;
·
half step;
·
break.
11.3. Constructions and
operational principles of stepper motor
The terms
stepper motor, stepping motor, and step motor are synonymous and are often used
interchangeably. A stepper motor is a device that converts a DC voltage pulse
train into a proportional mechanical rotation of its shaft. In essence, stepper
motors are discrete versions of the synchronous motor. The discrete motion of
the stepper motor makes it ideally suited for use with a digitally based
control system such as a microcontroller. Stepper motors have very good low
speed and holding torque, can run «open-loop» without the need for any kind of encoder to determine
the shaft position. The rotation speed of a stepper is independent of load,
provided it has sufficient torque to overcome slipping. The higher rpm a
stepper motor is driven, the more torque it needs, so all steppers eventually
poop out at some rpm and start slipping. Slipping is usually a disaster for
steppers, because the position of the shaft becomes unknown. There are three
basic types of stepper motors:
1.
Permanent-magnet(PM) stepper motors, which have magnetized rotors. Operational principle
is shown in Fig. 11.1 – changing
the winding currents it is possible to change the magnetic field and magnetized
rotor position.
2.
Variable-Reluctance (VR) stepper motors, which have soft-iron rotors with a wound stator
(Fig. 11.2). The number of teeth on the rotor and stator, together with the
winding configuration and excitation determines the step angle. This type of
stepper motor provides small to medium sized step angles and is capable of
operation at high stepping rates. A disadvantage of VR step-per motors is that
since the rotor is not magnetized, the holding torque is zero when the stator
windings are not energized (power off). Hence, there is no capability to hold a
mechanical load at a given position under power-off conditions unless
mechanical brakes are employed.
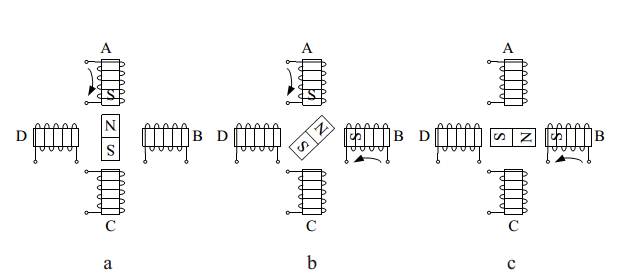
Fig. 11.1. Operational principle of a permanent-magnet stepper motor
3.
Hybridstepper motors, which have two stacks of rotor teeth forming the two poles of a
permanent magnet located along the rotor axis. The hybrid stepper motor is a
combination of the previous two types. Typically the stator has eight salient
poles, which are energized by a two-phase winding (Fig. 11.3). The rotor
consists of a cylindrical magnet, which is axially magnetized. The step angle
depends on the method of construction and is generally in the range 0.9°– 5°.
The most popular step angle is 1.8° – 200 steps per rotation. In this case
rotor has 50 teeth, and there are 4 winding poles.
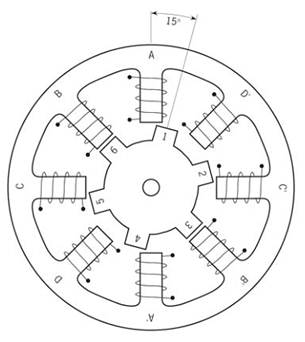
Fig. 11.2. Operational principle of a variable-reluctance stepper
mo
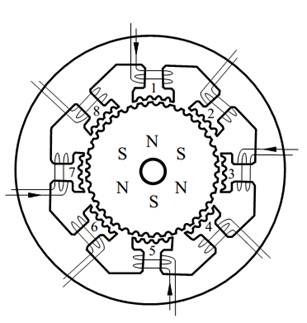
Fig. 11.3. Operational
principle of hybrid stepper motor
The stepper
motor characteristics (Fig. 11.4) can be described using the main terms:
·
Pull-out torque: The maximum torque that can be applied to a motor, running at a given
stepping rate, without losing synchronism.
·
Pull-in torque: The maximum torque against which a motor will start, at a given pulse
rate, and reach synchronism without losing a step.
·
Dynamic torque: The torque developed by the motor at very slow stepping speeds.
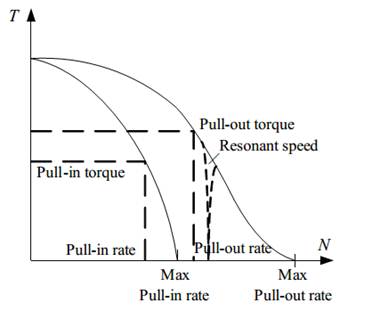
Fig. 11.4. General
characteristics of a typical stepper motor
·
Holding torque: The maximum torque that can be applied to an energized stationary motor
without causing spindle rotation.
·
Pull-out rate (maximum rotation speed): The maximum switching rate at which a motor
will remain in synchronism while the switching rate is gradually increased.
·
Pull-in rate: The maximum switching rate at which a loaded motor can start without
losing steps.
·
Slew range: The range of switching rates between pull-in and pull-out in which a
motor will run in synchronism but cannot start or reverse.
11.4. Method of
testing
Single mode.
1.
In «PRPGRAM
SELECTOR» (Fig. 11.3) school the «SINGLE» mode. Try to rotate the motor shaft
by hand in «STOP/PROGRAM» and «START/RUN» modes, note the difference. Measure
and note the current values in both modes.
2.
Press the button
«SINGLE STEP». Count the steps for a one complete motor shaft turn, compare
obtained number with given data. Try to change step direction (Fig. 11. 2).
Normal mode.
1.
In «PROGRAM
SELECTOR» (Fig. 11.3) choose the «NORMAL» mode. Select «BIPOLAR» mode in Driver
section. Connect Oscilloscope interface CH1 inputs to a1 and a2, CH2 inputs –
to b1 and b2. Set the SPEED potentiometer to a minimum position.
2.
Switch on to the
«START/RUN» mode. Sowly increase the rotation speed watching the scope curves
and current values until
3.
motor goes out
of sinchronization. Note the maximum rotation speed and pulse frequency.
Measure the coil current at different switching frequencies (from 0 till
maximum every 10 Hz) and make a dependence chart.
4.
Connect
oscilloscope to the windings – CH1 to the A1 and A2, CH2 – to the B1 and B2 and
check curves at different rotation speed. Make a screen shots at high speed, at
lower speed when current protection occurs, and at very low speed, when voltage
oscillations are visible.
Wave mode.
1.
In «PROGRAM SELECTOR» (Fig. 11.3) choose the «WAVE» mode. Repeat all steps like in Normal mode.
Half step mode.
1.
In «PROGRAM SELECTOR» (Fig. 11.3) choose the «HALF STEP» mode. Repeat all steps like in Normal mode.
2.
Note the pulse
frequency and rotation speed differencies com-paring to the full step modes.
Break mode.
1.
In «PROGRAM SELECTOR» (Fig. 11.3) choose the «BREAK» mode. Repeat all steps like in Normal mode.
2.
Try to adjust «Brake Time» and «Delay», note the
differencies in waveforms and motor work at various settings.
Ramp mode.
1.
In «PROGRAM SELECTOR» (Fig. 11.3) choose the «RAMP» mode. A typical ramping profile is presented.
2.
Turn «Base speed» to 20 % and «Run speed» to 50 %.
3.
Set «Ramp up» and «Ramp down» to 100 %.
4.
In «Rev selector» choose a certain number of turns.
5.
Run the motor
and note the process.
6.
Repeat the test
by decreasing the ramping time first «Ramp up» and later «Ramp down», note the results.
7.
Change «Base speed» and «Run speed» values. Try «Base speed» greater than «Run speed», see what happens.
8.
Draw and test
your own ramping diagram (Fig. 11.5).
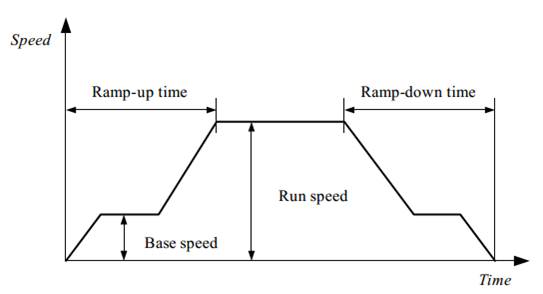
Fig. 11.5. A typical two
phase ramping profile
11.5. Content of Report
1.
Objective, task
and motor parameters of the laboratory work.
2.
Work results for
Experiment 1 – table with maximum rotation speed achieved using different
connection and control modes; control pulse and coil voltage oscillograms, coil
current dependence from pulse frequency for the offered control mode, ramping
diagram.
3.
Work results for
Experiment 1: maximum pull-out, resonance and maximum pull-in frequency values
for both unipolar and bipolar connection modes of unloaded motor and with
addition-al load.
4.
Work results for
Experiment 2: maximum pull-in and pull-out rates (Table 11.1) and torques
(Table 11.2) for different operation modes.
5.
Conclusions.
11.6. Control questions
1.
Enumerate
advantages and drawbacks of stepper motors.
2.
What are the
main connection types for stepper motors?
3.
How do the
parameters depend on connection type?
4.
What are control
modes for stepper motors?
5.
What control
mode can achieve maximum rotation speed?
6.
What is the
speed resonance and how to avoid it?
7.
What is the back-phasing
mode?
8.
Explain the ramp
mode using the diagram.
9.
How to find the
maximum pull-in and pull-out frequency?
10. How to find the maximum pull-in and pull-out torque?

