LABORATORY WORK №10
DEVELOPMENT OF EQUIVALENT
CIRCUITS
1.1.
Objectives
Get acquainted with starting transients of the current and velocity of
the squirrel-cage induction motor.
1.2.
Tasks
1.
Experimentally
obtain starting transients of motor phase cur-rent at no load.
2.
Experimentally
obtain starting transients of motor speed at no load.
1.3.
Development of equivalent circuits
The three-phase
induction motor is represented by a stationary equivalent circuit.
Considering the
rotor first and recognizing that the frequency of rotor currents is the slip
frequency, we may express the per-phase rotor leakage reactance ![]() at a slip s in terms of the standstill per
phase reactance
at a slip s in terms of the standstill per
phase reactance ![]() :
:
![]() (10.1)
(10.1)
Next we observe that
the magnitude of the voltage induced in the rotor circuit is also proportional
to the slip.
A justification
of this statement follows from transformer theory because we may view the
induction motor at standstill as a transformer with an air gap. For the
transformer, we know that the induced voltage, say ![]() , is given by:
, is given by:
![]() (10.2)
(10.2)
But at a slip s,
the frequency becomes sf. Substituting this value of frequency for Eq. (10.2)
yields the voltage ![]() at a slip s
as:
at a slip s
as:
![]() =
=![]() (10.3)
(10.3)
If ![]() is the
per-phase voltage induced in the rotor at standstill, then the voltage
is the
per-phase voltage induced in the rotor at standstill, then the voltage ![]() at a slip s is given by:
at a slip s is given by:
![]() (10.4)
(10.4)
Using Eqs.
(10.3) and (10.4), we obtain the rotor equivalent circuit shown in Fig. 10.1 a.
The rotor current ![]() is given by:
is given by:
 (10.5)
(10.5)
which may be
rewritten as:
 (10.6)
(10.6)
resulting in the alternative form of the equivalent
circuit shown in Fig. 10.1 b. Notice that these circuits are drawn on a
per-phase basis. To this circuit we may now add the per-phase stator equivalent
circuit to obtain the complete equivalent circuit of the induction mo-tor.
In an induction
motor, only the stator is connected to the ac source. The rotor is not
generally connected to an external source, and rotor voltage and current are
produced by induction. In this regard, as mentioned earlier, the induction
motor may be viewed as a transformer with an air gap, having a variable
resistance in the secondary. Thus, we may consider that the primary of the
trans-former corresponds to the stator of the induction motor, whereas the
secondary corresponds to the rotor on a per-phase basis. Because of the air
gap, however, the value of the magnetizing reactance Xm tends to be relatively low, compared to that of a
transformer. As in a transformer, we have a mutual flux linking both the stator
and the rotor, represented by the magnetizing reactance and various leakage
fluxes. For instance, the total rotor leakage flux is denoted by X2 in Fig. 10.1.
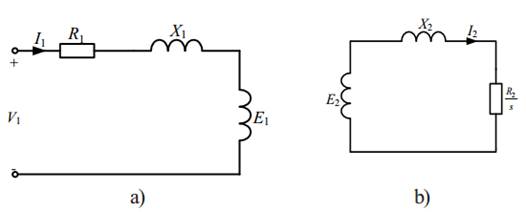
Fig. 10.1. Stator and
rotor as coupled circuits
Now considering
that the rotor is coupled to the stator as the secondary of a transformer is
coupled to its primary, we draw the circuit shown in Fig. 10.2.
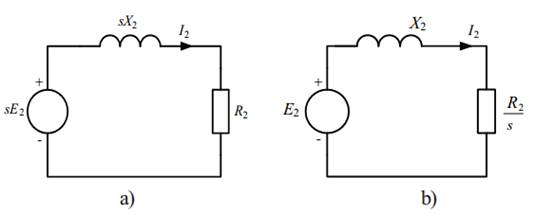
Fig. 10.2. Two forms of
rotor equivalent circuit
To develop this
circuit further, we need to express the rotor quantities as referred to the
stator. However, having referred the rotor quantities to stator, we obtain from
the circuit given in Fig. 10.2 the exact equivalent circuit (per phase) shown
in Fig. 10.3.
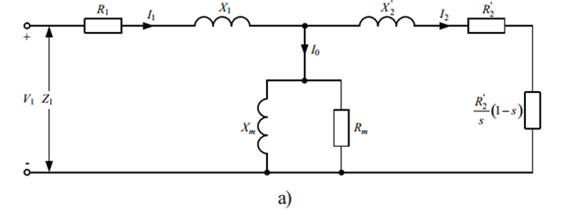
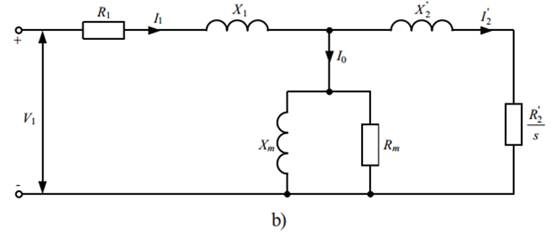
Fig. 10.3. Two forms of
equivalent per phase circuit of induction motor
Performance criteria of
induction motors
The performance
of an induction motor may be characterized by the following major factors:
locked rotor torque and current, pull up torque, breakdown torque and percent
slip. In addition, full-load torque and current must be considered when
evaluating an application.
Locked Rotor Torque. Locked rotor torque, also referred to as starting
torque, is developed when the rotor is held at rest with the rated voltage and
frequency applied. This condition occurs each time the motor is started. When
the rated voltage and frequency are applied to the stator there is a brief
amount of time before the rotor turns.
Locked Rotor Current. Locked rotor current is also referred to as starting
current. This is the current taken from the supply line at the rated voltage
and frequency with the rotor at rest.
Pull Up Torque. Pull up torque is the torque developed during
acceleration from start to the point breakdown torque occurs.
Breakdown Torque. Breakdown torque is the maximum torque a motor
develops at the rated voltage and speed without an abrupt loss of speed.
Full-Load Torque. Full-load torque is the torque developed when the
motor is operating with the rated voltage. A typical torque-slip curve is
presented in Fig. 10.4. Locked rotor torque (at standstill) is greater than
full load torque and the motor can be started at full load. Its speed increases
and rotor reaches speed determined by load, frequency and load.
Full-Load Current. Full-load current is the current taken from the
supply line at rated voltage, frequency and load. Three-phase AC motors, for
example, typically requires 600 % starting current and 150 % starting torque.
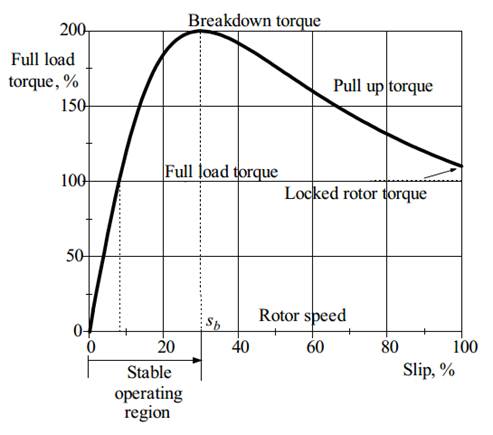
Fig. 10.4. A typical
torque-slip curve
1.4.
Method of testing
1.
Measurement of
current transient ![]() .
.
2.
Connect the
circuit shown in Fig. 10.5.
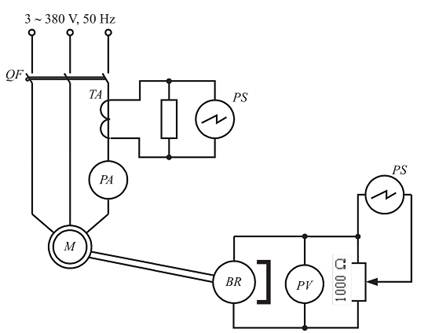
Fig. 10.5. Electrical
circuit for measurement of current and speed
Transients
3.
Switch
on and adjust the oscilloscope.
4.
Switch on the
induction motor and get the curve of current transient in the screen.
5.
Measurement of
speed transient ![]() .
.
6.
Connect the
oscilloscope to the terminals of tachogenerator BR load resistor.
7.
Switch on and
adjust the oscilloscope.
8.
Switch on the
induction motor and get the curve, proportional to rotational speed of motor.
9.
Calculate
electromechanical time constant from the obtained curve.
1.5.
Content of report
1. Task of the work and experimental circuit.
2. Experimental curve of current starting transients.
3. Experimental curve of speed starting transients.
4. Calculation of electro-mechanical time constant from
speed starting transient curve.
5. Conclusions.
1.6.
Control questions
1. Explain what elements are denoted as
QF, PA, PV, TA, BR in the electrical circuit.
2. What is called electromechanical time constant?
3. How can you find value of electromechanical speed
constant from the speed transient curve?
4. What current is measure red by ammeter PA?
5. What will happen if resistance TA will be turned off?
6. For what purpose is tachogenerator BR used in the
circuit?

