LABORATORY WORK № 9
DEVELOPING A ROTATING
MAGNETIC FIELD
1.1.
Objectives
Get acquainted with starting transients of the current and velocity of
the squirrel-cage induction motor.
1.2.
Tasks
1.
Experimentally
obtain starting transients of motor phase cur-rent at no load.
2.
Experimentally
obtain starting transients of motor speed at no load.
1.3.
Developing a rotating magnetic field
A rotating
magnetic field must be developed in the stator of an AC motor in order to
produce mechanical rotation of the rotor. Wire is coiled into loops and placed
in slots in the motor housing. These loops of wire are referred to as the
stator windings. The following drawing illustrates a three-phase stator. Phase
windings (A, B, and C) are placed 120° apart. In this example, a second set of
three-phase windings is installed. The number of poles is determined by how
many times a phase winding appears. In this example each phase winding appears
two times. This is a two-pole stator. If each phase winding appeared four times
it would be a four-pole stator.
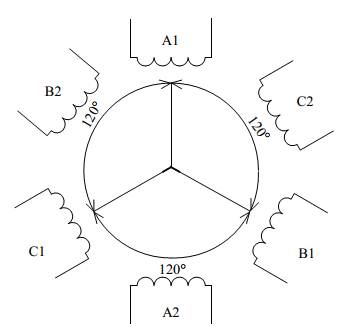
Fig. 9.1. Two-pole
stator winding
When AC voltage
is applied to the stator, the current flows through the windings. The magnetic
field developed in a phase winding depends on the direction of current flow
through that winding. The following chart is used here for explanation only. It
assumes that a positive current flow in A1, B1 and C1 windings result in a
north pole.
Table 9.1
Two-pole stator winding
|
Winding |
Current Flow Direction |
|
|
Positive |
Negative |
|
|
A1 |
North |
South |
|
A2 |
South |
North |
|
B1 |
North |
South |
|
B2 |
South |
North |
|
C1 |
North |
South |
|
C2 |
South |
North |
It is easier to
visualize a magnetic field if time is picked when no current is flowing through
one phase. In the following illustration, for example, time has been selected
during phase A which has no current flow, phase B has current flow in a
negative direction and phase C has current flow in a positive direction.
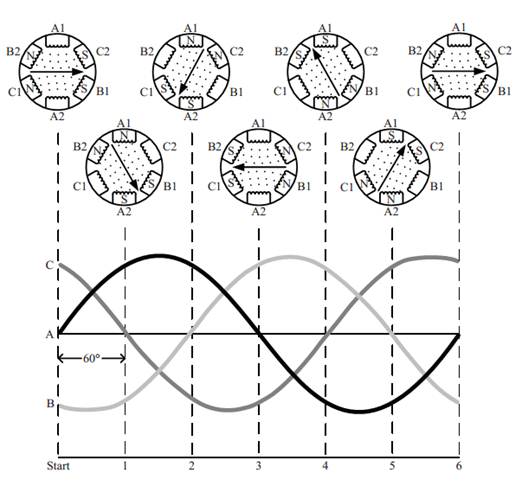
Fig. 9.2. Illustration
of rotating magnetic field
Based on the
above chart, B1 and C2 are south poles and B2 and C1 are north poles. Magnetic
lines of flux leave B2 North Pole and enter the nearest South Pole, C2.
Magnetic lines of flux also leave C1 North Pole and enter the nearest South
Pole B1. Magnetic field results are indicated by the arrow.
The amount of
flux lines (F) the magnetic field produces is proportional to the voltage (E)
divided by the frequency (f).
Increasing the
supply of voltage increases the flux of the magnetic field. Decreasing the
frequency increases the flux:
![]() (9.1)
(9.1)
Rotor construction
The most common
type of rotor is «squirrel cage» rotor. The construction of squirrel cage rotor is
reminiscent of rotating exercise wheels found in cages of pet rodents. The
rotor consists of a stack of steel laminations with evenly spaced conductor
bars around the circumference. The conductor bars are mechanically and
electrically connected with end rings. A slight skewing of the bars helps to
reduce audible hum. The rotor and shaft are an integral part.
Slip
There must be a
relative difference in speed between the rotor and the rotating magnetic field.
The difference in speed of the rotating magnetic field, expressed in RPM, and
the rotor, expressed in RPM, is known as slip.
Slip is
expressed as a percentage or as a fraction of the synchronous speed ![]() :
:
![]() (9.2)
(9.2)
as related by
slip s, defined as:
![]() (9.3)
(9.3)
where P is number of poles.
1.4.
Method of testing
1.
Measurement of
current transient ![]() .
.
2.
Connect the
circuit shown in Fig. 9.3.
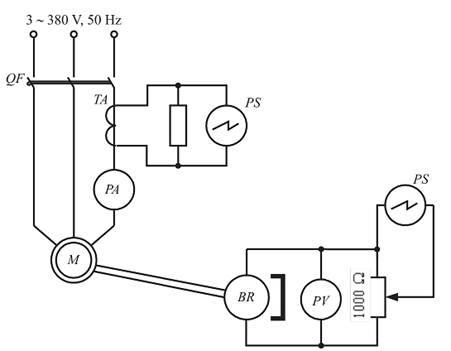
Fig. 9.3. Electrical
circuit for measurement of current and speed
Transients
3.
Switch
on and adjust the oscilloscope.
4.
Switch on the induction
motor and get the curve of current transient in the screen.
5.
Measurement of
speed transient ![]() .
.
6.
Connect the
oscilloscope to the terminals of tachogenerator BR load resistor.
7.
Switch on and
adjust the oscilloscope.
8.
Switch on the
induction motor and get the curve, proportional to rotational speed of motor.
9.
Calculate
electromechanical time constant from the obtained curve.
1.5.
Content of report
1. Task of the work and experimental circuit.
2. Experimental curve of current starting transients.
3. Experimental curve of speed starting transients.
4. Calculation of electro-mechanical time constant from
speed starting transient curve.
5. Conclusions.
1.6.
Control questions
1. Explain what elements are denoted as
QF, PA, PV, TA, BR in the electrical circuit.
2. What is called electromechanical time constant?
3. How can you find value of electromechanical speed
constant from the speed transient curve?
4. What current is measure red by ammeter PA?
5. What will happen if resistance TA will be turned off?
6. For what purpose is tachogenerator BR used in the
circuit?

