LABORATORY WORK № 8
INVESTIGATION OF TRANSIENTS
IN THE
INDUCTION MOTOR DRIVE
1.1.
Objectives
Get acquainted with starting transients of the current and velocity of
the squirrel-cage induction motor.
1.2.
Tasks
1.
Experimentally
obtain starting transients of motor phase cur-rent at no load.
2.
Experimentally
obtain starting transients of motor speed at no load.
1.3.
Induction motors
The induction
motor is the most commonly used electric motor. It is the workhorse of
industry. Like the dc machine and the synchronous machine, an induction machine
consists of a stator and a rotor. The rotor is mounted on bearings and
separated from the stator by an air gap. Electromagnetically, the stator
consists of a core made up of punchings (or laminations) carrying slot-embedded
conductors. These conductors are interconnected in a predetermined fashion and
constitute armature windings, which are similar to the windings of synchronous
machines.
Alternating
current is supplied to the stator windings, and the currents in rotor windings
are induced by the stator currents. The rotor of the induction machine is
cylindrical and carries either (1) con-ducting bars short-circuited at both
ends in a cage-type machine, or (2) a polyphase winding with terminals brought
out to slip rings for external connections, as in a wound-rotor machine. A
wound winding is similar to that of the stator. Sometimes the cage-type machine
is called a brushless machine and the wound-rotor machine – a slip-ring
machine.
An induction
machine operates on the basis of the interaction of the induced rotor currents
and air-gap fields. If the rotor is allowed to run under the torque developed
by this interaction, the machine will operate as a motor. On the other hand,
when the rotor is driven by an external source beyond a certain speed the
machine begins to deliver electric power and operates as an induction generator
(in-stead of as an induction motor, which absorbs electric power). Thus, the
induction machine is capable of functioning either as a motor or as a
generator. In practice, its application as a generator is less common than its
application as a motor. We will first study the motor operation, then develop
the equivalent circuit of an induction motor, and subsequently show that the
complete characteristics of an induction machine, operating either as a motor
or as a generator, are obtainable from the equivalent circuit.
Rotating magnetic field
The stator of a
simple three phase machine is presented in Fig. 8.1. Each stator coil consists
of two conductors in series; conductors A and A’ make up coil A–A’, conductors
B and B’ constitute coil B–B’, and conductors C and C’ constitute coil C–C’.
Notice that coil B–B’ is 120° counterclockwise from coil A–A’, and C–C’ is 120°
counterclockwise from B–B’.
Assume that the
three stator coils are excited by three-phase currents:
![]() (8.1)
(8.1)
![]() (8.2)
(8.2)
![]() (8.3)
(8.3)
The positive directions of the currents are indicated in Fig. 8.1.
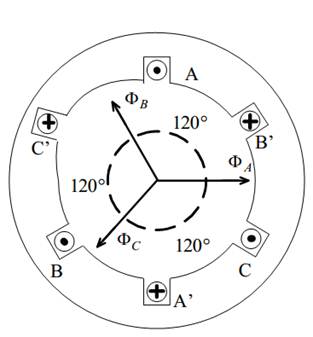
Fig. 8.1. Three-phase
stator excited by three-phase currents
Assume that the
iron is everywhere unsaturated and that the flux produced by each current is
proportional to that current.
Thus, according
to Eq. (8.1, 8.2, 8.3), the synchronous flux is constant in magnitude, and
rotates in a counterclockwise direction at an angular velocity of ω rad/sec.
In a general
case of an n-phase two-pole system, it is not difficult to
show that the resultant flux created by application of m-phase currents, equal in magnitude, to the stator is:
![]() (8.4)
(8.4)
where ![]() is the flux created by the winding having a peak
value of
is the flux created by the winding having a peak
value of ![]() . The multiplier
. The multiplier ![]() denotes
rotating magnetic field.
denotes
rotating magnetic field.
1.4.
Method of testing
1.
Measurement of
current transient ![]() .
.
2.
Connect the
circuit shown in Fig. 9.3.
3.
Switch on and
adjust the oscilloscope.
4.
Switch on the
induction motor and get the curve of current transient in the screen.
5.
Measurement of
speed transient ![]() .
.
6.
Connect the
oscilloscope to the terminals of tachogenerator BR load resistor.
7.
Switch on and
adjust the oscilloscope.
8.
Switch on the
induction motor and get the curve, proportional to rotational speed of motor.
9.
Calculate
electromechanical time constant from the obtained curve.
1.5.
Content of report
1. Task of the work and experimental circuit.
2. Experimental curve of current starting transients.
3. Experimental curve of speed starting transients.
4. Calculation of electro-mechanical time constant from
speed starting transient curve.
5. Conclusions.
1.6.
Control questions
1. Explain what elements are denoted as
QF, PA, PV, TA, BR in the electrical circuit.
2. What is called electromechanical time constant?
3. How can you find value of electromechanical speed
constant from the speed transient curve?
4. What current is measure red by ammeter PA?
5. What will happen if resistance TA will be turned off?
6. For what purpose is tachogenerator BR used in the
circuit?

