LABORATORY WORK № 3
INVESTIGATION INTO
SEPARATELY EXCITED DIRECT CURRENT MOTORCHARACTERISTICS
1.1.
Objectives
Analyze properties and obtain torque-speed characteristics of separately
excited direct current motor using Matlab-Simulink.
1.2.
Task
Use simulation
to obtain characteristics of separately ex-cited direct current (DC) motor:
·
without
additional resistance in the armature;
·
with additional
resistance in the armature;
·
at reduced
supply voltage.
1.3.
Direct current motors
An electric
machine is a reversible energy converter. The same electric machine can work as
an electric motor or a generator of electrical energy. Electric motors are used
in drives of technological machines (fans, pumps, compressors, etc.) or in
drives of different technological equipment. Modern technological machines need
electric motors with flexible speed and torque control and high efficiency.
Electrical and
magnetic circuits are two basic components of all electric machines. In order
to achieve a higher efficiency of a ma-chine, the magnetic circuit must have a
higher magnetic conductivity (lower reluctance) and the electrical circuit – a
higher electrical conductivity (lower resistance). Therefore magnetic circuits
are made of ferromagnetic materials and windings of machines are made of cop-per.
To suppress the eddy currents, magnetic circuits of AC machines are made from
thin insulated sheets of steel. The magnetic circuit of DC machines consists of
massive steel and permanent magnets. Important component of magnetic circuit is
the air gap between the stator and the rotor of the machine. For higher
efficiency, the air gap must be minimized.
The basic
elements of a DC machine are the rotating coil, means for the production of
flux, and the commutator-brush arrangement.
In a practical
DC machine the coil is replaced by the armature winding mounted on cylindrical
magnetic structure. The flux is pro-vided by the field winding wound on field
poles or permanent magnets windings. Some machines carry more than one separate
field winding on the same core. The excitation winding or permanent magnets on
the poles of the machine generate magnetic field in DC machine shown in Fig.
3.1. The poles (N, S) are fixed to
the yoke of the machine. The yoke is a part of the magnetic core and housing of
the machine. The part of the machine, where magnetic field is generated, is
called an inductor.
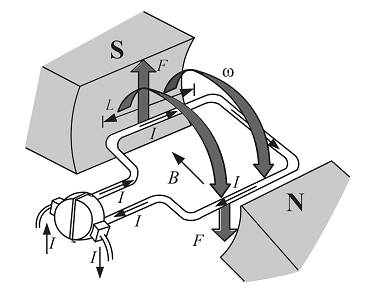
Fig. 3.1. Principle of
DC motor operation
The field poles,
mounted on the stator, carry the field windings. Some machines carry more than
one separate field winding on the same core. The armature winding is placed on
the rotating member, the rotor, and the field winding is on the stationary member,
the stator, of DC machine. The schematic of Fig. 3.1 shows most of the
important parts of DC machine. The current-carrying conductors of the armature
are moving in this magnetic field. Continuous rotating of the armature is
possible when the direction of the current is commutated according to the
position of the conductors in relation to the pole. This process is realized by
a commutator that consists of copper contacts and sliding carbon brushes. The
commutator is made of hard-drawn copper segments insulated from one another by
mica. The armature windings are connected to the commutator segments or bars,
over which the carbon brushes slide and serve as leads for electrical
connection.
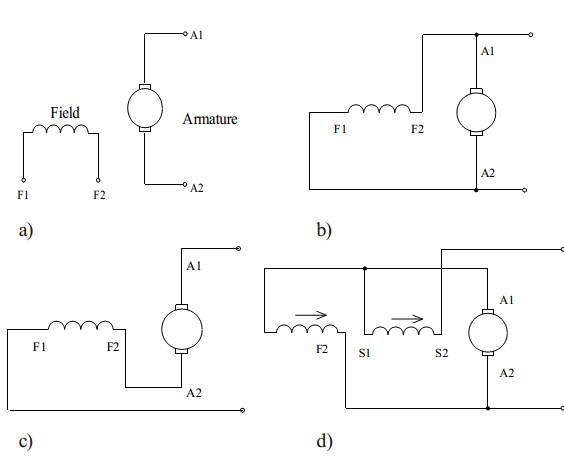
Fig. 3.2. Classification
of DC machines: a) separately excited,
b) shunt, c) series, d)
cumulative compound
Conventional DC
machines having a set of field windings can be classified on the basis of
mutual electrical connections between the field and armature windings, as shown
in Fig. 3.2. These inter-connections of field and armature windings essentially
determine the machine’s operating characteristics.
Performance equations
The three
quantities of the greatest interest in evaluating the performance of a DC
machine are: the induced EMF, electromagnetic torque developed by the machine,
and speed.
The voltage
(EMF) induced in the armature winding depends on Z – the number of active conductors on armature; a – the number of parallel paths in
armature winding; p – the number of
field poles; F – flux per pole, Wb, and n – speed of rotation of the armature, revolutions per minute
(rpm); Back EMF E is calculated as:
![]() (3.1)
(3.1)
For the torque production we must have a current through the armature,
as this current interacts with the field produced by the field winding. If Ia is the current and E is the voltage induced in the
armature, assuming that this entire electric power is transformed to mechanical
form, we can write:
![]() (3.2)
(3.2)
Where Te is
electromagnetic torque developed by the armature and w is its angular velocity in radians per second. The speed n in rpm (revolutions per minute) and ω in rad/s are related as:
![]() (3.3)
(3.3)
From Eqs. (3.1) and (3.3) we obtain:
![]() (3.4)
(3.4)
which can be written as:
![]() (3.5)
(3.5)
or
![]() (3.6)
(3.6)
where
![]() (3.7)
(3.7)
Equation (3.6) indicates that torque delivered by the
motor at constant field flux depend just on armature current. At steady state
operation torque, delivered by motor is equal to load torque.
DC machine operating as a motor will have an EMF
induced while rotating in a magnetic field and will develop a torque if the
armature carries a current.
Referring to Fig. 3.2 a which shows the equivalent circuit of a separately excited DC
motor running at speed n while taking
an armature current Ia, at voltage V we have from this circuit:
![]() (3.8)
(3.8)
1.4.
Method of testing
1.
Speed –torque characteristic ![]() , at
, at ![]() and
and ![]()
2.
Enter the indicated or calculated values of motor parame-ters to the model
blocks. The torque-speed characteristic is obtained by changing load torque by
the indicated step and measuring rotation speed of armature.
3.
Speed-torque characteristic ![]() , at the reduced armature voltage:
, at the reduced armature voltage: ![]() and
and ![]()
4.
Enter to model blocks calculated or indicated values of pa-rameters.
5.
Change the motor load by the indicated step and measure torque and
armature speed.
6.
Put
the obtained results in Table 3.1.
Table 3.1.
Speed torque characteristics at reduced voltage
|
|
0 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
1.2 |
|
T, N |
|
|
|
|
|
|
|
|
w, rad/s |
|
|
|
|
|
|
|
7.
Speed-torque characteristic ![]() at the rated armature voltage:
at the rated armature voltage: ![]() and
and ![]()
8.
Enter to the model blocks calculated or indicated values.
9.
This characteristic is simulated by changing motor load torque by
appropriate step and measuring speed of armature.
10.
Put the obtained results to Table 3.2.
Table 3.2
Data of
speed-torque characteristic at the increased armature resistance
|
x |
0 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
1.2 |
|
T, N |
|
|
|
|
|
|
|
|
w, rad/s |
|
|
|
|
|
|
|
Plot speed-torque characteristics ![]() in one reference frame according to the data of Table 3.1, Table 3.2.
in one reference frame according to the data of Table 3.1, Table 3.2.
1.5.
Content of Report
1.
Objective, task and model of the laboratory work.
2.
Work results (tables of simulation results and characteristics).
3.
Conclusions.
1.6. Control questions
1.
Graphical and alphabetical notation of motor windings.
2.
What speed is called no-load speed of rotation?
3.
What dependence is called speed-torque characteristic?
4.
What dependence is called speed regulation characteristic
5.
On what parameters does the motor starting current depend?
6.
What technique can be used to change the motor rotation speed?

