LABORATORY WORK № 4
TECHNIQUE OF FULFILLING THE
LABORATORY WORK №3. MATLAB
4.1. Objectives
Analyze properties and obtain torque-speed characteristics of separately
excited direct current motor using Matlab-Simulink.
4.2. Task
Use simulation
to obtain characteristics of separately ex-cited direct current (DC) motor:
·
without
additional resistance in the armature;
·
with additional
resistance in the armature;
·
at reduced
supply voltage.
4.3.
Direct current motors. MATLAB
MATLAB software
allows to model and simulate almost any linear or nonlinear
system. The model of the
system is composed of Simulink library blocks using Drag-and-Dropp technology,
allowing selecting neccessary block in the library and dragging it by mouse
into the model window and leaving it here. Afterwards all blocks are connected
in the required manner. Similar system is called S-model. Elaborated model is
saved and has extension *.mdl.
The model used
to simulate separate excited DC motor is opened in this way:
·
double click on
icon «Matlab» to open Matlab;
·
double click on
Simulink icon in the horizontal toolbar which looks like this:

·
open file separately_excited_motor.mdl;
·
in the opened
window separately_excited_motor.mdl the
model of separately excited motor should appear, which will be used to
investigate characteristics of the sepatarately excited motor.
·
The model allows
analyzing dynamic and steady-state modes of direct current motor. The model of
separately excited DC motor is presented in Fig. 4.1. Elements enterring the model and their purpose are
not analyzed. Here only elements of the model parameters of which will be
changed are discussed.
Given or
calculated parameters are entered in the blocks of the model. The appointed
armature resistance value is substituded to block «Gain». Block «Gain» should be selected and opened by double click with the
left mouse buton on the block. The dialog window presented in Fig. 4.2 appears.
In the
square Parameters the required value is entered. For ex-ample, if we need to change the
resistance of armature, we need to make double click on the corresponding
element, then the dialog window Block Parameters: Ra opens. In the Parameters window square Gain the required value of armature resistance is entered
and the button OK is pressed.
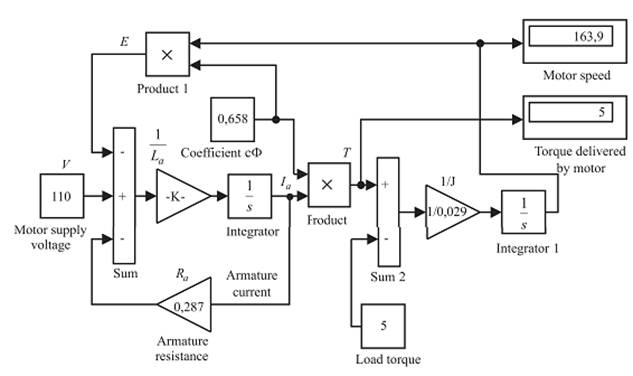
Fig.
4.1.
Simulink model of separately excited DC motor
Motor supply
voltage, coefficient cF, load torque
are entred into blocks Constant.
This block is
opened and values are entered in the same way as to block Gain.
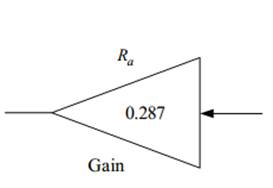
Fig. 4.2. Graphical view
of block Gain and window to enter armature
resistance
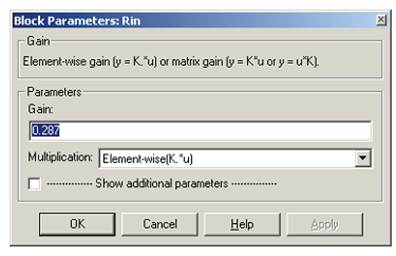
Fig. 4.3. Graphical view
of block Gain and window to enter armature
resistance
Simulation results (field and armature current, motor speed) are
observed in the block Display.
Fig. 4.5. Block Display
The model of
separately excited DC motor is elaborated on the base of differential equations
that are replaced by equations in frequency domain. The elaboration of the
model is not considered.
When all
parameters are entered, simulation is started. It can be started by some
different commands: choosing in Simulation menu option Start; using button combination Ctrl + Tor pressing special icon in
Toolbar.
Initial data for modeling are given in Table 4.1.
Table 4.1.
Initial data
|
Variant |
Type of motor |
Rated voltage of the motor, Vr, V |
Rated speed of the motor, Nr, V |
Rated armature current, Ir, A |
Armature resistance, Rin |
Increased armature resistance, Rinx |
Reduced voltage, Vx, V |
|
7 |
P – 12 |
110 |
1000 |
2.75 |
6.14A |
5 |
0,7 |
4.4.
Testing of direct current motors
1.
Speed –torque characteristic ![]() , at
, at ![]() and
and ![]()
2.
Enter the indicated or calculated values of motor parame-ters
to the model blocks. The torque-speed characteristic is obtained by changing
load torque by the indicated step and measuring rotation speed of armature.
3.
Speed-torque characteristic ![]() , at the reduced armature voltage:
, at the reduced armature voltage: ![]() and
and ![]()
4.
Enter to model blocks calculated or indicated values of
pa-rameters.
5.
Change the motor load by the indicated step and measure
torque and armature speed.
6.
Put the obtained results in Table 4.2.
Table 4.2.
Speed torque characteristics at reduced voltage
|
|
0 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
1.2 |
|
T, N |
|
|
|
|
|
|
|
|
w, rad/s |
|
|
|
|
|
|
|
7.
Speed-torque characteristic ![]() at the rated armature voltage:
at the rated armature voltage: ![]() and
and ![]()
8.
Enter to the model blocks calculated or indicated values.
9.
This characteristic is simulated by changing motor load torque by
appropriate step and measuring speed of armature.
10.
Put the obtained results to Table 4.3.
Table 4.3
Data of
speed-torque characteristic at the increased armature resistance
|
x |
0 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
1.2 |
|
T, N |
|
|
|
|
|
|
|
|
w, rad/s |
|
|
|
|
|
|
|
Plot speed-torque characteristics ![]() in one reference frame according to the data of Table 4.1, Table 4.2 and
Table 4.3.
in one reference frame according to the data of Table 4.1, Table 4.2 and
Table 4.3.
4.5.
Content of Report
1.
Objective, task and model of the laboratory work.
2.
Work results (tables of simulation results and characteristics).
3.
Conclusions.
4.6. Control questions
1.
Graphical and alphabetical notation of motor windings.
2.
What speed is called no-load speed of rotation?
3.
What dependence is called speed-torque characteristic?
4.
What dependence is called speed regulation characteristic
5.
On what parameters does the motor starting current depend?
6.
What technique can be used to change the motor rotation speed?

