LECTURE №9
DRIVES
AND MECHANISMS. STEPPER MOTORS AND SERVO MOTORS
9.1.
STEPPER MOTOR AND SERVOMOTOR
A stepper motor is a
pulse-driven motor that changes the angular position of the rotor in steps. Due
to this nature of a stepper motor, it is widely used in low cost, open loop
position control systems.
Servomotors are special
electromechanical devices that produce precise degrees of rotation. A servo
motor is a DC or AC or brushless DC motor combined with a position sensing
device. Servomotors are also called control motors as they are involved in
controlling a mechanical system. The servomotors are used in a closed-loop
servo system as shown in Figure 9.1.1. A reference input is sent to the servo
amplifier, which controls the speed of the servomotor. A feedback device is
mounted on the machine, which is either an encoder or resolver. This device
changes mechanical motion into electrical signals and is used as a feedback.
This feedback is sent to the error detector, which compares the actual
operation with that of the reference input. If there is an error, that error is
fed directly to the amplifier, which will be used to make necessary corrections
in control action. In many servo systems, both velocity and position are
monitored. Servomotors provide accurate speed, torque, and have ability of
direction control.
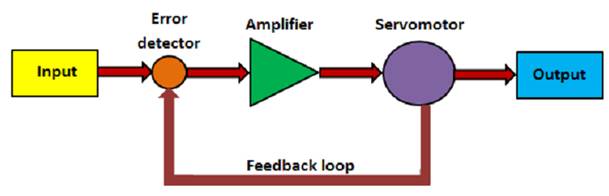
Fig. 9.1.1. Servo system
block diagram
DC servomotors
DC operated servomotors are
usually respond to error signal abruptly and accelerate the load quickly. A DC
servo motor is actually an assembly of four separate components, namely:
·
DC motor;
·
gear assembly;
·
position-sensing
device;
·
control circuit.
AC servo motor
In this type of motor, the
magnetic force is generated by a permanent magnet and current which further
produce the torque. It has no brushes so there is little noise/vibration. This
motor provides high precision control with the help of high resolution encoder.
The stator is composed of a core and a winding. The rotor part comprises of
shaft, rotor core and a permanent magnet. Digital encoder can be of optical or
magnetic type. It gives digital signals, which are in proportion of rotation of
the shaft. The details about optical encoder have already discussed in Lecture
3.
Аdvantages of servo motors:
·
provides high
intermittent torque, high torque to inertia ratio, and high speeds;
·
work well for
velocity control;
·
available in all
sizes;
·
quiet in
operation;
·
smoother
rotation at lower speeds.
Disadvantages of servo
motors:
Ø
more expensive
than stepper motors;
Ø
require tuning
of control loop parameters;
Ø
not suitable for
hazardous environments or in vacuum;
Ø excessive current can result in partial
demagnetization of dc type servo motor.
9.2. CAMS. CLASSIFICATION
OF CAMS
Cams are mechanical devices
which are used to generate curvilinear or irregular motion of mechanical
elements. They are used to convert rotary motion into oscillatory motion or
oscillatory motion into rotary motion. There are two links namely the cam
itself which acts as an input member. The other link that acts as an output
member is called the follower. The cam transmits the motion to the follower by
direct contact. In a cam-follower pair, the cam usually rotates while the
follower translates or oscillates. Complicated output motions which are
otherwise difficult to achieve can easily be produced with the help of cams.
Cams are widely used in internal combustion engines, machine tools, printing
control mechanisms, textile weaving industries, automated machines etc.
Necessary elements of a cam
mechanism are shown in Figure 9.2.1.
·
a driver member
known as the cam;
·
a driven member
called the follower;
·
a frame which
supports the cam and guides the follower.
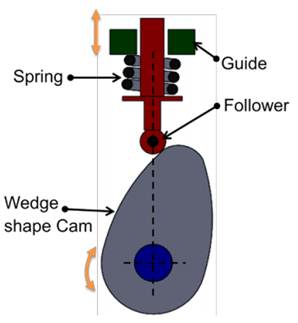
Fig. 9.2.1. Cam mechanism
Classification of cams
Wedge and Flat Cams
A wedge cam has a wedge of
specified contour and has translational motion. The follower can either
translate or oscillate. A spring is used to maintain the contact between the cam
and the follower. Figure 9.2.2 shows the
typical arrangement of Wedge cam.
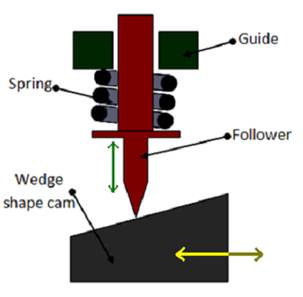
Fig. 9.2.2. Wedge cam
Plate cam
In this type of cams, the
follower moves in a radial direction from the centre of rotation of the cam
(Figure 9.2.3). They are
also known as radial or disc cam. The follower reciprocates or oscillates in a
plane normal to the cam axis. Plate cams are very popular due to their
simplicity and compactness.
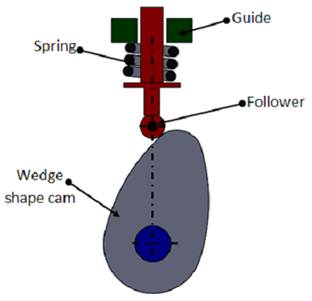
Fig. 9.2.3. Plate cam
Cylindrical cam
Here a cylinder has a
circumferential contour cut in the surface and the cam rotates about its axis
(Figure 9.2.4). The
follower motion is either oscillating or reciprocating type. These cams are
also called drum or barrel cams.
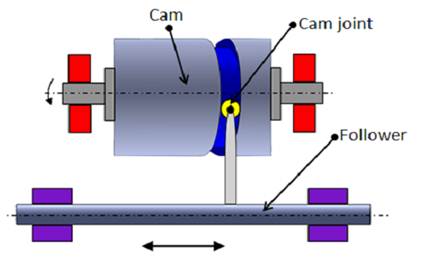
Fig. 9.2.4. Cylindrical cam
Classification
of followers
Followers can be classified
based on:
·
type of surface
contact between cam and follower;
·
type of follower
motion;
·
line of motion
of followers.
Classification
based on type of surface contact between cam and follower
Figure 9.2.5 shows the schematics of various types of followers
used cam mechanisms.
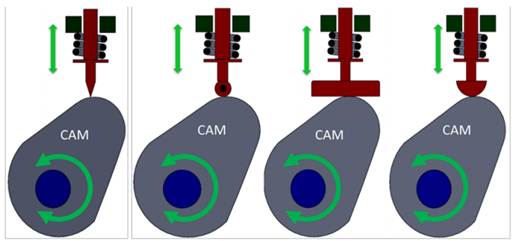
Fig. 9.2.5. Types of
follower based on the surface in contact
Knife edge follower
The contacting end of the
follower has a sharp knife edge. A sliding motion exists between the contacting
cam and follower surfaces. It is rarely used in practice because the small area
of contacting surface results in excessive wear.
Roller follower
It consists of a cylindrical
roller which rolls on cam surface. Because of the rolling motion between the
contacting surfaces, the rate of wear is reduced in comparison with Knife edge
follower. The roller followers are extensively used where more space is
available such as gas and oil engines.
Flat face follower
The follower face is
perfectly flat. It experiences a side thrust due to the friction between contact
surfaces of follower and cam.
Spherical face follower
The contacting end of the follower
is of spherical shape which overcomes the drawback of side thrust as
experiences by flat face follower.
9.3.
CLASSIFICATION BASED ON FOLLOWERS’ MOTION
Figure 9.3.1. shows the types of cams based followers’ motion.
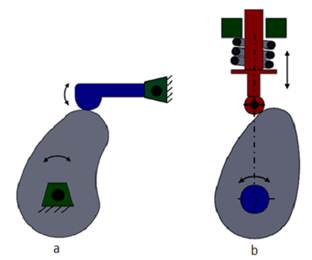
Fig. 9.3.1. Classification of
follower based on motion
Oscillating follower
In this configuration, the rotary motion of the cam is
converted into predetermined oscillatory motion of the follower as shown in
Figure 9.3.1 a).
Translating follower
These are also called as reciprocating follower. The
follower reciprocates in the «guide» as the cam
rotates uniformly as shown in Figure 9.3.1 b).
Applications of
cams
Cams are widely used in
automation of machinery, gear cutting machines, screw machines, printing press,
textile industries, automobile engine valves, tool changers of machine centers,
conveyors, pallet changers, sliding fork in wearhouses etc.
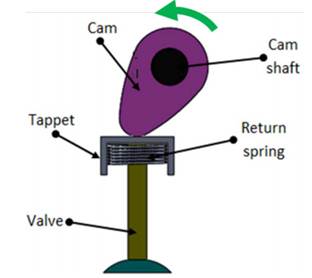
Fig. 9.3.2. Cam in I.C
engine
Cams are also used in I.C
engines to operate the inlet valves and exhaust valves.The cam shaft rotates by
using prime moveres. It causes the rotation of cam. This rotation produces
translatory motion of tappet against the spring. This translatory motion is
used to open or close the valve. The schematic of this operation is shown in
Figure 9.3.2.
Cams in
automatic lathes
The cam shaft is driven by a
motor. The cutting tool mounted on the transverse slide travels to desired
depth and at desired feed rate by a set of plate cams mounted on the cam shaft.
The bar feeding through headstock at desired feed rate is carried out by a set
of plate cams mounted on the camshaft.
Automatic
copying machine
The cam profile can be
transferred onto the work piece by using a roller follower as shown in Figure
9.3.3. The follower can be mounted with a cutting tool. As the cam traverses,
the roller follows the cam profile. The required feature can be copied onto the
workpiece by the movement of follower over the cam profile.
The cam shaft is driven by a
motor. The cutting tool mounted on the transverse slide travels to desired
depth and at desired feed rate by a set of plate cams mounted on the cam shaft.
The bar feeding through headstock at desired feed rate is carried out by a set
of plate cams mounted on the camshaft.

Fig. 9.3.3. Automatic
copying of cam profile
The cam profile can be
transferred onto the work piece by using a roller follower as shown in Figure 9.3.3. The follower can be mounted with a cutting tool. As
the cam traverses, the roller follows the cam profile. The required feature can
be copied onto the workpiece by the movement of follower over the cam profile.

