LECTURE № 8
DRIVES AND
MECHANISMS. ELEMENTS OF CNC MACHINE TOOLS: ELECTRIC MOTORS
8.1. DRIVES
Basic function of a CNC
machine is to provide automatic and precise motion control to its elements such
work table, tool spindle etc. Drives are used to provide such kinds of
controlled motion to the elements of a CNC machine tool. A drive system consists
of drive motors and ball lead-screws. The control unit sends the amplified
control signals to actuate drive motors which in turn rotate the ball
lead-screws to position the machine table or cause rotation of the spindle.
Power drives
Drives used in an automated
system or in CNC system are of different types such as electrical, hydraulic or
pneumatic.
·
Electrical
drives:
These are direct current
(DC) or alternating current (AC) servo motors. They are small in size and are
easy to control.
·
Hydraulic drives:
These drives have large
power to size ratio and provide stepless motion with great accuracy. But these
are difficult to maintain and are bulky. Generally they employ petroleum based
hydraulic oil which may have fire hazards at upper level of working temperatures.
Also hydraulic elements need special treatment to protect them against
corrosion.
·
Pneumatic drives:
This drives use air as
working medium which is available in abundant and is fire proof. They are
simple in construction and are cheaper.
However these drives generate low power, have less positioning accuracy
and are noisy.
In CNC, usually AC, DC,
servo and stepper electrical drives are used. The various drives used in CNC
machines can be classified as:
1. spindle drives to provide the main spindle power for
cutting action;
2. feed drives to drive the axis.
Spindle drives
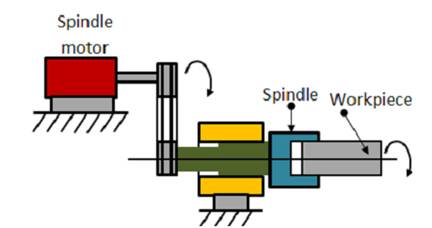
Fig. 8.1.1. Schematic of a
spindle drive
The spindle drives are used
to provide angular motion to the workpiece or a cutting tool. Figure 8.1.1
shows the components of a spindle drive. These drives are essentially required
to maintain the speed accurately within a power band which will enable
machining of a variety of materials with variations in material hardness. The
speed ranges can be from 10 to 20,000 rpm. The machine tools mostly employ DC
spindle drives. But as of late, the AC drives are preferred to DC drives due to
the advent of microprocessor-based AC frequency inverter. High overload
capacity is also needed for unintended overloads on the spindle due to an
inappropriate feed. It is desirous to have a compact drive with highly smooth
operation.
Feed Drives
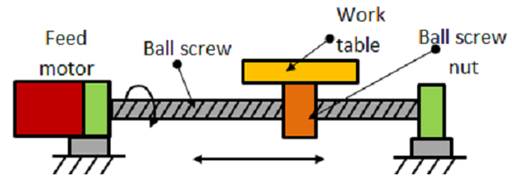
Fig. 8.1.2. Typical feed
drive
These are used to drive the
slide or a table. Figure 8.1.2 shows various elements of a feed drive. The
requirements of an ideal feed drive are as follows:
·
the feed motor
needs to operate with constant torque characteristics to overcome friction and
working forces;
·
the drive speed
should be extremely variable with a speed range of about 1: 20000, which means
it should have a maximum speed of around 2000 rpm and at a minimum speed of 0.1
rpm;
·
the feed motor
must run smoothly;
·
the drive should
have extremely small positioning resolution;
·
other
requirements include high torque to weight ratio, low rotor inertia and quick
response in case of contouring operation where several feed drives have to work
simultaneously.
Variable speed DC drives are
used as feed drives in CNC machine tools. However now-a-days AC feed drives are
being used.
Electrical
drives
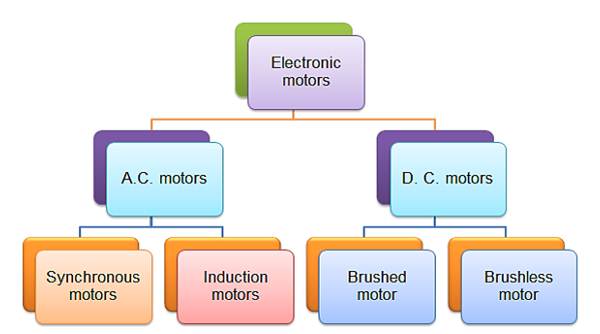
Fig. 8.1.3. Classification
of motors
Electric drives are mostly
used in position and speed control systems. The motors can be classified into
two groups namely DC motors and AC motors (Fig. 8.1.3). In this session we
shall study the operation, construction, advantages and limitations of DC and
AC motors.
8.2. DC MOTORS
A DC motor is a device that
converts direct current (electrical energy) into rotation of an element
(mechanical energy). These motors can further be classified into brushed DC motor and
brushless DC motors.
Brush type DC
motor
A typical brushed motor
consists of an armature coil, slip rings divided into two parts, a pair of
brushes and horse shoes electromagnet as shown in Fig. 4.1.4. A simple DC motor has two field poles namely
a north pole and a south pole. The magnetic lines of force extend across the
opening between the poles from north to south. The coil is wound around a soft
iron core and is placed in between the magnet poles. These electromagnets
receive electricity from an outside power source. The coil ends are connected
to split rings. The carbon brushes are in contact with the split rings. The
brushes are connected to a DC source. Here the split rings rotate with the coil
while the brushes remain stationary.
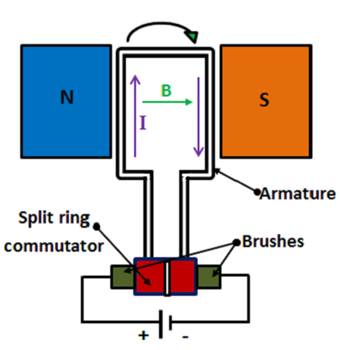
Fig. 8.2.1. Brushed DC motor
The working is based on the
principle that when a current-carrying conductor is placed in a magnetic field,
it experiences a mechanical force whose direction is given by Fleming's
left-hand rule. This field produces a force which turns the armature. This force
is called torque. This torque will cause the armature to turn until its
magnetic field is aligned with the external field. Once aligned the direction
of the current in the windings on the armature reverses, thereby reversing the
polarity of the rotor's electromagnetic field. A torque is once again exerted
on the rotor, and it continues spinning. The change in direction of current is
facilitated by the split ring commutator. The main purpose of the commutator is
to overturn the direction of the electric current in the armature. The
commutator also aids in the transmission of current between the armature and
the power source. The brushes remain stationary, but they are in contact with
the armature at the commutator, which rotates with the armature such that at
every 180° of rotation, the current in the armature is reversed.
Advantages of brushed DC
motor:
·
the design of
the brushed dc motor is quite simple;
·
controlling the
speed of a brush dc motor is easy;
·
very cost
effective.
Disadvantages of brushed DC
motor:
·
high maintenance;
·
performance
decreases with dust particles;
·
less reliable in
control at lower speeds;
·
the brushes wear
off with usage.
Brushless DC
motor
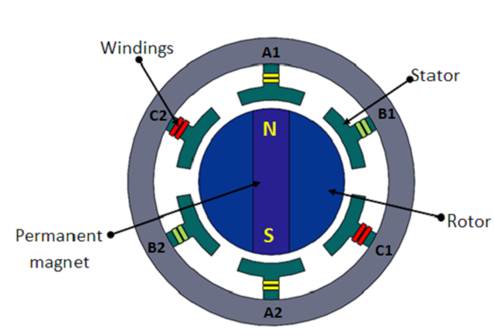
Fig. 8.2.2. Brushless DC
motor
A brushless DC motor has a
rotor with permanent magnets and a stator with windings. The rotor can be of
ceramic permanent magnet type. The brushes and commutator are eliminated and
the windings are connected to the control electronics. The control electronics
replace the commutator and brushes and energize the stator sequentially. Here
the conductor is fixed and the magnet moves (Fig. 8.2.2).
The current supplied to the
stator is based on the position of rotor. It is switched in sequence using
transistors. The position of the rotor is sensed by Hall effect sensors. Thus a
continuous rotation is obtained.
Аdvantages of brushless dc motor:
·
more precise due
to computer control;
·
more efficient;
·
no sparking due
to absence of brushes;
·
less electrical
noise;
·
no brushes to
wear out;
·
electromagnets
are situated on the stator hence easy to cool;
·
motor can
operate at speeds above 10,000 rpm under loaded and unloaded conditions;
·
responsiveness
and quick acceleration due to low rotor inertia.
Disadvantages of brushless
DC motor:
·
higher initial
cost;
·
complex due to
presence of computer controller;
·
brushless dc
motor also requires additional system wiring in order to power the electronic
commutation circuitry.
8.3. AC MOTORS
AC motors convert AC current
into the rotation of a mechanical element (mechanical energy). As in the case
of DC motor, a current is passed through the coil, generating a torque on the
coil. Typical components include a stator and a rotor. The armature of rotor is
a magnet unlike DC motors and the stator is formed by electromagnets similar to
DC motors. The main
limitation of AC motors over DC motors is that speed is more difficult to
control in AC motors. To overcome this limitation, AC motors are equipped with
variable frequency drives but the improved speed control comes together with a
reduced power quality.
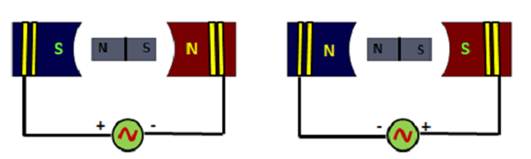
Fig. 8.3.1. AC motor working
principle
The working principle of AC
motor is shown in fig. 4.1.6. Consider the rotor to be a permanent magnet.
Current flowing through conductors energizes the magnets and develops N and S
poles. The strength of electromagnets depends on current. First half cycle
current flows in one direction and in the second half cycle it flows in
opposite direction. As AC voltage changes the poles alternate.
AC motors can be classified
into synchronous motors and induction motors.
Synchronous
motor
A synchronous motor is an AC
motor which runs at constant speed fixed by frequency of the system. It
requires direct current (DC) for excitation and has low starting torque, and hence
is suited for applications that start with a low load. It has two basic
electrical parts namely stator and rotor as shown in fig. 8.3.2.
The stator consists of a
group of individual wounded electro-magnets arranged in such a way that they
form a hollow cylinder. The stator produces a rotating magnetic field that is
proportional to the frequency supplied. The rotor is the rotating electrical
component. It also consists of a group of permanent magnets arranged around a
cylinder, with the poles facing toward the stator poles. The rotor is mounted
on the motor shaft. The main difference between the synchronous motor and the
induction motor is that the rotor of the synchronous motor travels at the same
speed as the rotating magnet.
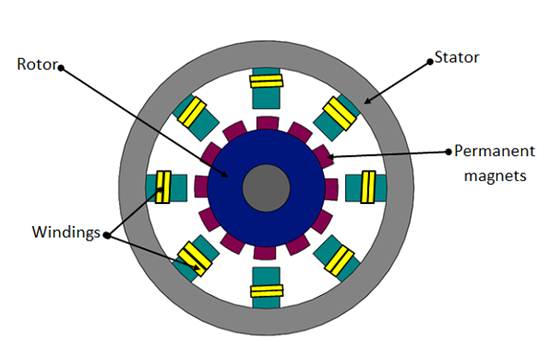
Fig. 8.3.2. Synchronous AC
motor
The stator is given a three
phase supply and as the polarity of the stator progressively change the
magnetic field rotates, the rotor will follow and rotate with the magnetic
field of the stator. If a synchronous motor loses lock with the line frequency
it will stall. It cannot start by itself, hence has to be started by an
auxiliary motor.
Induction motor
Induction motors are quite
commonly used in industrial automation. In the synchronous motor the stator
poles are wound with coils and rotor is permanent magnet and is supplied with
current to create fixed polarity poles. In case of induction motor, the stator
is similar to synchronous motor with windings but the rotors’ construction is
different.
Rotor of an induction motor
can be of two types:
·
a squirrel-cage
rotor consists of thick conducting bars embedded in parallel slots. The bars can be
of copper or aluminum. these bars are fitted at both ends by means end rings as
shown in figure 8.3.3;
·
a wound rotor
has a three-phase, double-layer, distributed winding. The rotor is wound for as
many numbers of poles as the stator. The three phases are wired internally and
the other ends are connected to slip-rings mounted on a shaft with brushes
resting on them.
Induction motors can be
classified into two types:
·
single-phase induction motor: It has one stator winding and a squirrel cage rotor.
It operates with a single-phase power supply and requires a device to start the
motor;
·
three-phase induction motor: The rotating magnetic field is produced by the
balanced three-phase power supply. These motors can have squirrel cage or wound
rotors and are self-starting.
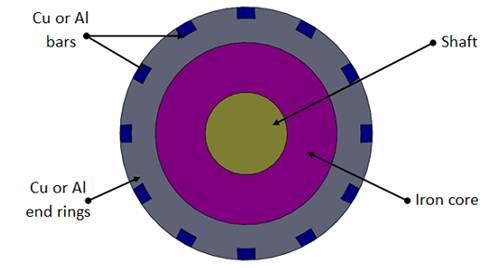
Fig. 8.3.3. Induction motor
rotor
In an induction motor there
is no external power supply to rotor. It works on the principle of induction.
When a conductor is moved through an existing magnetic field the relative
motion of the two causes an electric current to flow in the conductor. In an
induction motor the current flow in the rotor is not caused by any direct
connection of the conductors to a voltage source, but rather by the influence
of the rotor conductors cutting across the lines of flux produced by the stator
magnetic fields. The induced current which is produced in the rotor results in
a magnetic field around the rotor. The magnetic field around each rotor
conductor will cause the rotor conductor to act like the permanent magnet. As
the magnetic field of the stator rotates, due to the effect of the three-phase
AC power supply, the induced magnetic field of the rotor will be attracted and
will follow the rotation. However, to produce torque, an induction motor must
suffer from slip. Slip is the result of the induced field in the rotor windings
lagging behind the rotating magnetic field in the stator windings.
Advantages of AC induction
motors:
·
it has a simple
design, low initial cost, rugged construction almost unbreakable;
·
the operation is
simple with less maintenance (as there are no brushes);
·
the efficiency
of these motors is very high, as there are no frictional losses, with
reasonably good power factor;
·
the control gear
for the starting purpose of these motors is minimum and thus simple and
reliable operation.
Disadvantages of AC
induction motors:
·
the speed
control of these motors is at the expense of their efficiency;
·
as the load on
the motor increases, the speed decreases;
·
the starting
torque is inferior when compared to dc motors.
8.4. STEPPER
MOTOR
A stepper motor is a
pulse-driven motor that changes the angular position of the rotor in steps. Due
to this nature of a stepper motor, it is widely used in low cost, open loop
position control systems.
·
Types of stepper
motors:
Ø
permanent magnet;
Ø
employ permanent
magnet;
Ø
low speed,
relatively high torque.
·
Variable
Reluctance:
Ø
does not have
permanent magnet;
Ø
low torque.
Variable
Reluctance Motor
Figure 8.4.1 shows the construction of Variable Reluctance
motor. The cylindrical rotor is made of soft steel and has four poles as shown
in Fig.4.2.1. It has four rotor teeth, 90⁰apart and six stator poles, 60⁰ apart.
Electromagnetic field is produced by activating the stator coils in sequence.
It attracts the metal rotor. When the windings are energized in a reoccurring
sequence of 2, 3, 1, and so on, the motor will rotate in a 30⁰ step angle. In the non-energized condition, there is
no magnetic flux in the air gap, as the stator is an electromagnet and the
rotor is a piece of soft iron; hence, there is no detent torque. This type of
stepper motor is called a variable reluctance stepper.
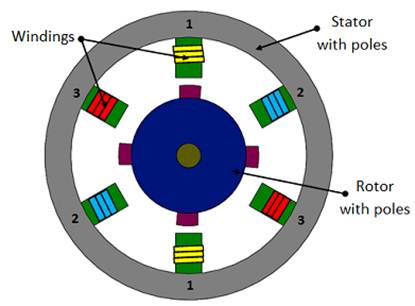
Fig. 8.4.1. Variable
reluctance stepper motor
Permanent magnet
(PM) stepper motor
In this type of motor, the
rotor is a permanent magnet. Unlike the other stepping motors, the PM motor
rotor has no teeth and is designed to be magnetized at a right angle to its axis.
Figure 8.4.2 shows a simple,
90⁰ PM motor with four phases (A-D). Applying current to
each phase in sequence will cause the rotor to rotate by adjusting to the
changing magnetic fields. Although it operates at fairly low speed, the PM
motor has a relatively high torque characteristic. These are low cost motors
with typical step angle ranging between 7.5⁰ to 15⁰.
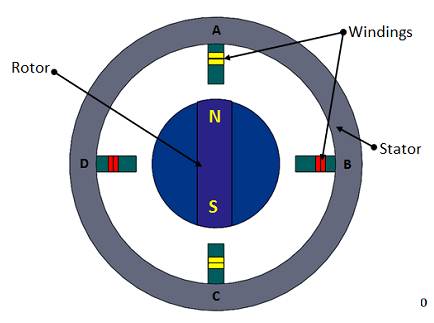
Fig. 8.4.2. Permanent magnet
stepper
Hybrid stepper
motor
Hybrid stepping motors
combine a permanent magnet and a rotor with metal teeth to provide features of
the variable reluctance and permanent magnet motors together. The number of
rotor pole pairs is equal to the number of teeth on one of the rotor’s parts.
The hybrid motor stator has teeth creating more poles than the main poles
windings (Fig. 8.4.3).
Rotation of a hybrid
stepping motor is produced in the similar fashion as a permanent magnet
stepping motor, by energizing individual windings in a positive or negative
direction. When a winding is energized, north and south poles are created,
depending on the polarity of the current flowing. These generated poles attract
the permanent poles of the rotor and also the finer metal teeth present on
rotor. The rotor moves one step to align the offset magnetized rotor teeth to
the corresponding energized windings. Hybrid motors are more expensive than
motors with permanent magnets, but they use smaller steps, have greater torque
and maximum speed.
Advantages of stepper motors:
·
low cost;
·
ruggedness;
·
simplicity of
construction;
·
low maintenance;
·
less likely to
stall or slip;
·
will work in any
environment;
·
excellent
start-stop and reversing responses.
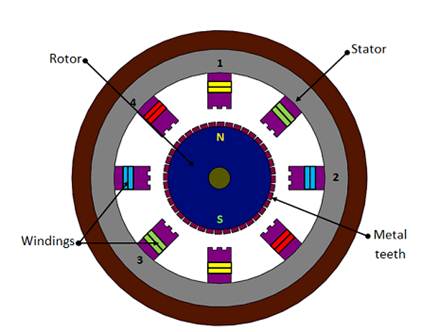
Fig. 8.4.3. Hybrid stepper
motor
Disadvantages of stepper
motors:
·
low torque
capacity compared to dc motors;
·
limited speed;
·
during
overloading, the synchronization will be broken. vibration and noise occur when
running at high speed.

