У лекції розглядається математичний опис
систем автоматизованого управління (САУ). Основні принципи опису включають
використання диференціальних рівнянь для моделювання динаміки системи, що
дозволяє описати взаємозв'язок між вхідними і вихідними величинами.
Математичний опис також включає побудову моделей в просторі станів, що дає
можливість аналізувати стабільність і керованість системи. Крім того,
розглядаються різні методи, такі як передавальні функції, для опису лінійних
САУ. Це дозволяє здійснювати прогнозування поведінки системи та проектування
ефективних алгоритмів управління.
На етапі розробки та дослідження автоматичної системи керування
(АСУ) створюється її математичний опис, який може бути поданий в трьох основних
формах: аналітичній, графічній та табличній.
1. Аналітичний опис використовується для представлення системи за допомогою
рівнянь, які описують взаємодію її елементів. Це дозволяє точно моделювати
процеси та взаємозв'язки в системі.
2. Графічний опис включає структурні схеми, графіки та графи, які візуально
зображують компоненти системи та їх зв'язки, полегшуючи розуміння процесів.
3. Табличний опис використовує таблиці для систематизації інформації, що
допомагає зрозуміти параметри системи та її взаємодії.
Щоб отримати математичний опис системи, зазвичай складається
опис окремих елементів, а потім їх рівняння зводяться до загального рівняння
для всієї системи. Це рівняння (і відповідні структурні схеми) становлять
математичну модель автоматичної системи керування.
Математична модель системи може змінюватися залежно від цілей
дослідження. Наприклад, на початкових етапах можна використовувати спрощену
модель, а потім поступово додавати нові компоненти для врахування додаткових
явищ, що могли бути відкинуті спочатку як незначні. Це зумовлено суперечливими
вимогами до моделі: з одного боку, вона повинна точно відображати реальну
систему, а з іншого – бути достатньо простою для полегшення досліджень.
Для складання рівняння динаміки системи автоматичного
регулювання (САР) її розбивають на окремі ланки. Кожну ланку аналізують окремо,
і тип ланки визначається рівнянням, яке описує перетворення вхідного впливу.
Існують різні типи елементарних динамічних ланок, зокрема: пропорційна
(підсилювальна), аперіодична, коливальна, інтегруюча та диференціююча.
Кожна ланка має кілька основних характеристик:
1. Рівняння динаміки — описує залежність
вихідної величини від вхідного впливу.
2. Передаточна функція — визначає
співвідношення виходу та входу в лінійній системі.
3. Вагова (імпульсна перехідна) функція — описує відповідь
системи на одиничний імпульс.
4. Перехідна функція — характеризує
поведінку системи на одиничне поступове змінення вхідного сигналу.
5. Частотні характеристики — описують поведінку
системи в частотній області, зокрема її амплітудно-фазову характеристику.
Рівняння динаміки ланки (системи) визначає, як вихідна величина x(t)x(t)x(t) залежить
від вхідної величини g(t)g(t)g(t). Це
рівняння може бути подано в диференційній або операторній формі. Операторна
форма є зручнішою для подальшого аналізу, оскільки замінює похідні на
оператори, що спрощує роботу з рівняннями та дозволяє легко застосовувати
методи трансформації (наприклад, трансформацію Лапласа).
Рисунок 7.1 – Залежність вихідної до вхідної величини
У теорії автоматичного регулювання
прийнято приводити рівняння ланки до стандартного вигляду:
![]() (7.1)
(7.1)
![]() (7.2)
(7.2)
де ![]() ;
; ![]() ;
; ![]() -
сталі часу;
-
сталі часу; ![]() - коефіцієнт підсилення ланки.
- коефіцієнт підсилення ланки.
Передаточна
функція ланки W(p) – це відношення зображень по Лапласу вихідної і вхідної
величин: W(p)=X(p)/G(p)
Теоретичне
визначення передаточної функції виходить з відомого перетворення Лапласа,
згідно з яким деяка функція часу f(t) – оригінал – може бути перетворена в
функцію комплексної величини S, яка є зображенням відповідного оригіналу.
Формула прямого перетворення Лапласа:
![]() (7.3)
(7.3)
Використовуючи
розроблені методи перетворення, теореми і формули, забезпечимо розв’язання
інтегрально-диференційних рівнянь, дотримуючись відповідних дій над
зображеннями. Потім на основі зворотнього
перетворення Лапласа перейдемо до дійсної функції – оригіналу. Формула
зворотного перетворення Лапласа, яке позначається L–1, матиме
вигляд:
![]() (7.4)
(7.4)
Передаточні
функції при використанні перетворень Лапласа представляють як відношеня зображень вихідної і вхідної величин:
![]() (7.5)
(7.5)
При
нульових початкових умовах передатну функцію можна подати на основі запису
відповідних величин в операторній формі.
Тому в
теорії автоматичного керування передатну функцію часто записують так:
![]() (7.6)
(7.6)
При
цьому виходять із рівняння елемента в загальному вигляді:
P(p)хвих = Q(p) хвх
,
де
P(p), Q(p) – відповідні оператори.
7.1. Типові елементи систем автоматичного
керування
На практиці перехідні процеси різних за
своїми фізичними принципами дії ланок визначаються подібними диференціальними
рівняннями динаміки, що дає можливість класифікувати їх за виглядом рівнянь
динаміки.
Основними динамічними характеристиками
елемента є (рис. 7.2):
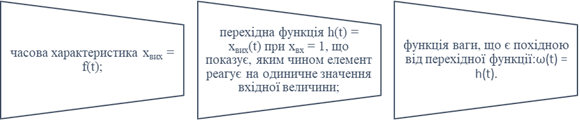
Рисунок 7.2 – Динамічні характеристики
елементів САР
Крім названих характеристик елементів,
важливими характеристиками є: передаточні функції W(р) та частотні
характеристики елементів.
Відповідно до рівнянь динаміки розрізняють
типові динамічні ланки.
Безінерційна ланка — це
математична модель або система, яка не має внутрішньої затримки або інерції,
тобто її вихід змінюється миттєво при зміні вхідного сигналу. У таких ланках
відсутні компоненти, які б викликали тимчасову затримку або пам'ять про
попередні стани. Рівняння
динаміки має вигляд:
xвих = kхвх
(7.7)
Це рівняння показує, що вхідна величина
миттєво, без будь-яких відхилень, надходить на вихід елемента з передатним
коефіцієнтом k.
Часова характеристика зображена на рисунку
7.3:
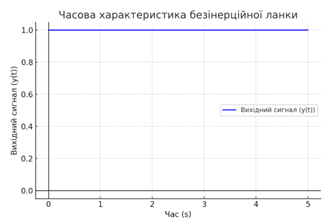
Рисунок 7.3 – Часова характеристика
Аперіодична ланка першого порядку — це динамічна система, яка
має характеристику першого порядку, тобто її поведінка описується рівнянням,
яке має один полюс у комплексній площині. Такі ланки зазвичай мають одну
характеристичну постійну часу, яка визначає швидкість їх відгуку. Така
ланка має рівняння динаміки:
![]() (7.8)
(7.8)
В операторному
вигляді:
(Тр + 1) хвих = k хвх.
(7.9)
Часова характеристика має вигляд (рис.
7.4):
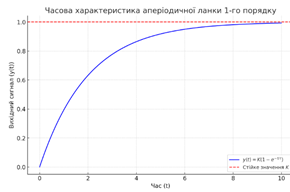
Рисунок 7.4 – Часова характеристика
Ланки другого порядку — це елементи механізмів, які складаються
з двох або більше частин і забезпечують передачу руху між ланками першого
порядку (зазвичай це рухомі елементи). Вони є частиною складніших механізмів і
виконують функцію з'єднання та передачі механічної енергії. До цієї групи відносять ланки, які мають
рівняння динаміки вигляду:
![]() (7.10)
(7.10)
В операторній формі запису у вигляді:
![]() (7.11)
(7.11)
Часова характеристика має вигляд (рис.
7.5):
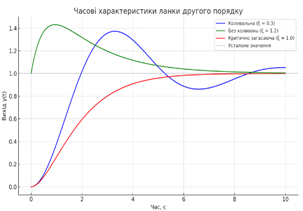
Рисунок 7.5 – Часова характеристика
залежно від коренів рівняння можливі два
різновиди ланок другого порядку – аперіодичні та коливальні.
Ці ланки мають один і той самий зовнішній
вигляд, але різко відрізняються по вигляду часової характеристики.
Коливальна ланка – це динамічний елемент системи автоматичного керування, реакція
якого на одиничний вхід має характер коливань, що поступово затухають у часі. Коливальною ланкою є елемент другого
порядку при комплексних коренях характеристичного рівняння з від’ємною дійсною
частиною.
Часова характеристика має вигляд (рис.
7.6):
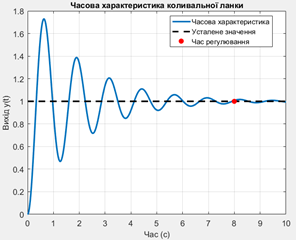
Рисунок 7.6 – Часова характеристика
Інтегруючі ланки — це важливі елементи в системах автоматичного управління, які
використовуються для досягнення стабільного виходу або забезпечення постійної
компенсації в системах з високими вимогами до точності. Ланки такого типу мають рівняння динаміки
вигляду:
![]() (7.12)
(7.12)
В операторній формі запису:
![]() (7.13)
(7.13)
Часова характеристика наведена на рисунку
7.7.
Диференціююча ланка є важливим елементом в системах автоматичного управління, який
має властивість диференціювати вхідний сигнал, тобто на виході отримується
похідна від вхідного сигналу.
Рівняння динаміки елемента має вигляд:
![]() (7.14)
(7.14)
xвих = k ·р ·xвх
(7.15)
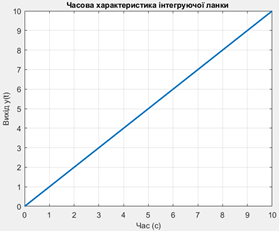
Рисунок 7.7 – Часова характеристика
Часова характеристика має вигляд (рис.
7.8):
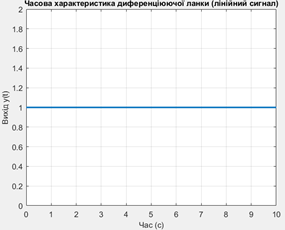
Рисунок 7.8 – Часова характеристика
Ланки із
запізненням характеризуються тим, що вхідний сигнал передається на вихід із
певною затримкою τ. У багатьох випадках вважається, що коефіцієнт передачі
таких ланок дорівнює одиниці. Прикладами подібних елементів є трубопроводи,
транспортери тощо.
Рівняння ланок із запізненням мають
вигляд:
хвих (t) = хвх(t
– τ)
(7.16)
Після перетворень за Лапласом і
використання теореми запізнення в операторній формі запису рівняння матиме
вигляд:
хвих (p) = хвх(p)
е–pτ
(7.17)
Часові характеристики ланок із запізненням
мають вигляд (рис. 7.8):

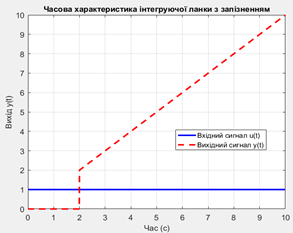
Рисунок 7.8 – Часові характеристики диференціюючої
та інтегруючої ланок
Передаточні функції в ТАУ мають значне
поширення використовуютьсяfзsметою (рис. 7.9):
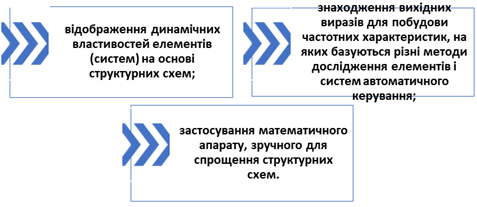
Рисунок 7.9 – Застосування передаточних в
ТАУ
Питання для
самоперевірки
1. Що таке
математичний опис САУ?
2. Які
рівняння використовуються для опису САУ?
3. Що таке
передаточна функція САУ?
4. Як за
допомогою математичного опису можна зрозуміти, як працює система?
5. Що таке сигнал в
математичному описі САУ?
![]()
![]()