Тема 4. Основні
загальні характеристики елементів САК
У
лекції розглядаються основні загальні характеристики елементів систем
автоматизованого контролю (САК). Серед них — точність, швидкодія, стійкість та
надійність. Точність характеризує здатність елемента точно вимірювати чи
регулювати величину, швидкодія визначає час, необхідний для виконання операції,
а стійкість — здатність системи адаптуватися до змінних умов. Надійність
стосується здатності елемента працювати без відмов протягом тривалого часу. Ці
характеристики є критичними для ефективної роботи САК у різних сферах.
4.1.
Основні загальні характеристики елементів САК
Передаточний
коефіцієнт визначається із загальної характеристики:
![]() (4.1)
(4.1)
При
цьому відношення
![]() (4.2)
(4.2)
називають передаточним статичним
коефіцієнтом, якщо хвих і хвх
є встановлені значення величин.
Динамічним передаточним коефіцієнтом є
похідна:
![]() (4.3)
(4.3)
для датчиків – це коефіцієнт чутливості,
а для підсилювачів – коефіцієнт
підсилення.
Часова характеристика визначається
залежністю хвих = f(t). При надходженні на
вхід елемента постійного сигналу.
Багато елементів з механічною інерцією
мають часові характеристики у вигляді експоненти (рис. 4.1):

Рисунок 4.1 – Схема часової характеристики
Перехідний процес у них визначається
неоднорідним диференціальним рівнянням першого порядку, розв’язок якого має
вигляд:
![]() (4.4)
(4.4)
де Т
– стала часу елемента.
Її можна знайти при умові t = Т. Тоді
![]() (4.5)
(4.5)
Особливості елементів визначається
запізненням, інерційністю та зонами нечутливості.
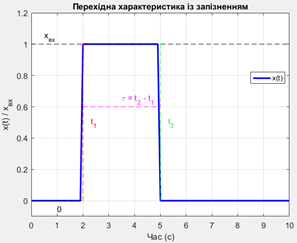
Рисунок 4.2 – Схема перехідного процесу із запізненням
Під запізненням розуміють зсув по часу між сигналами на вході та
виході елемента. Кількісно запізнення оцінюється через різницю часу: τ =
t2 – t1, де t1 — час, коли вхідний сигнал досягає певного рівня, а t2 — час,
коли вихідний сигнал досягає відповідного рівня.
Часову константу T, яка характеризує інерційність елементів,
часто називають інерційним затриманням. Вона відображає здатність елемента
реагувати на зміни вхідного сигналу з певним запізненням.
Зона нечутливості — це діапазон варіацій вхідного сигналу, в
межах якого елемент не реагує на ці коливання. Тобто, в межах цієї зони зміни
вхідного сигналу не спричиняють помітних змін на виході елемента.
4.2.
Зворотні зв’язки в САР
Зворотний зв’язок визначається як метод організації зв’язків у системі, при якому на вхід елемента Е подається
величина хзв.з, що пропорційна його вихідному
значенню. Такий підхід дозволяє системі коригувати свою роботу на основі
інформації, отриманої з виходу. Сигнал зворотного зв’язку формується за
допомогою пристрою зворотного зв’язку — ЗЗ (рис. 4.3).
Зворотний зв’язок може бути позитивним або негативним, в
залежності від того, чи збільшує або зменшує він вплив на вхід системи.
Негативний зворотний зв’язок зазвичай використовується для стабілізації
системи, зменшуючи коливання та підвищуючи точність регулювання.

Рисунок 4.3 – Схема зворотнього
з’язку в САР
Його дія визначається коефіцієнтом
зворотного зв’язку, який показує відношення вихідної величини пристрою
зворотного зв’язку хзв.з до вихідної
величини елемента хвих:
![]() (4.6)
(4.6)
Частіше β < 1, проте можливі
випадки, коли β > 1.
У системах автоматичного керування
розрізняють кілька типів зворотних зв’язків:
1. Додатні та від’ємні зворотні зв’язки: Додатний зворотний
зв’язок підсилює вихідний сигнал, додаючи його до вхідного, що може призводити
до нестабільності (наприклад, у підсилювачах). Від’ємний зворотний зв’язок
зменшує похибку, віднімаючи пропорційну частину вихідного сигналу від вхідного,
забезпечуючи стабільність (наприклад, у термостатах).
Додатнім зворотнім зв’язком називають
зв’язок, дія якого збігається за знаком з дією вхідної величини на даний
елемент.
Якщо рівняння ланки до введення
зворотного зв’язку має вигляд: хвих = kхвх, то
при наявності зворотного зв’язку
фактичне значення вхідної величини обчислюється за формулою:
![]() (4.7)
(4.7)
У цьому випадку рівняння ланки,
охопленої додатнім зворотним зв’язком, має вигляд
![]() (4.8)
(4.8)
Звідки
![]() (4.9)
(4.9)
і
коефіцієнт при додатному зворотному зв’язку
![]() (4.10)
(4.10)
Введення додатного зворотного зв’язку
призводить до зростання коефіцієнта передачі.
При від’ємному зворотному зв’язку:
![]() (4.11)
(4.11)
І коефіцієнт ланки
![]() (4.12)
(4.12)
буде
зменшуватися, що позитивно впливає на затухання (стабілізацію) перехідних
процесів.
2. Жорсткі та гнучкі
зворотні зв’язки. Жорсткий зворотний зв’язок передбачає фіксовану пропорційність між
вихідним сигналом і сигналом зворотного зв’язку, тобто H(s)=const.
Переваги:
простота реалізації, оскільки не потребує складних обчислень чи динамічних
регулювань; абезпечує швидку реакцію на відхилення,
що корисно для систем із чіткими параметрами. Недоліки: не адаптується до змін умов роботи (наприклад, при
нелінійних об’єктах); може призводити до надмірної корекції або осциляцій у
складних системах.
Приклад:
регулювання швидкості обертання двигуна за допомогою пропорційного зворотного
зв’язку.
Гнучкий зворотний зв’язок враховує динамічні характеристики системи, використовуючи,
наприклад, інтегральні чи диференціальні складові.
Переваги:
адаптивність до змін у системі, що дозволяє працювати з нелінійними об’єктами;
зменшує статичну похибку завдяки інтегральній складовій (наприклад, у
ПІД-регуляторах). Недоліки:
складніша реалізація через потребу в налаштуванні параметрів (коефіцієнтів
ПІД); може призводити до перерегулювання, якщо
диференціальна складова надто велика.
Приклад:
ПІД-регулятор у системі контролю рівня рідини, де гнучкий зв’язок компенсує
інерцію.
3. Головні та місцеві зворотні зв’язки. Головний зворотний зв’язок охоплює всю систему, повертаючи сигнал
із кінцевого виходу на вхід системи.
Переваги: забезпечує комплексне регулювання всієї
системи, враховуючи кінцевий результат; дозволяє компенсувати збурення на всіх
етапах (наприклад, у системі регулювання температури в реакторі). Недоліки: збільшує складність системи
через довгий ланцюг зворотного зв’язку; може призводити до затримок у реакції
через велику кількість елементів у контурі.
Приклад:
Регулювання тиску в котлі, де головний зворотний
зв’язок коригує роботу нагрівача.
Місцевий зворотний зв’язок діє всередині підсистеми, коригуючи поведінку окремого
елемента. Переваги: підвищує
локальну стабільність і швидкодію окремого блоку (наприклад, у каскаді
підсилювача); зменшує вплив внутрішніх збурень на окремі елементи. Недоліки: не враховує поведінку всієї
системи, що може призводити до неузгодженості; обмежена ефективність у складних
системах із взаємозалежними елементами.
Приклад:
Зворотний зв’язок у блоці підсилювача для стабілізації його роботи.
Кожен тип зворотного зв’язку
має свої сильні та слабкі сторони, що визначає його застосування в САР.
Від’ємний і гнучкий зворотний зв’язок частіше використовуються для стабільності
та точності, тоді як додатний і жорсткий — для підсилення чи швидкої реакції.
Головний зв’язок забезпечує комплексний контроль, а місцевий — локальну
оптимізацію. Вибір типу залежить від вимог до системи, таких як швидкодія,
точність чи стійкість до збурень.
Питання для самоперевірки
1. Що таке елементи системи автоматичного
керування (САК)?
2. Які основні характеристики елементів САК
необхідно враховувати при їх виборі?
3. Що таке передаточна функція елемента САК?
4. Як впливає часова характеристика елемента на
роботу САК?
5. Що таке чутливість елементів САК і чому вона
важлива?
![]()
![]()