Тема 3. Системи прямої та
непрямої дії
У лекції розглядаються системи прямої та
непрямої дії. У системах прямої дії управління здійснюється безпосередньо, без
використання зворотного зв'язку, наприклад, у простих механізмах. Натомість у
системах непрямої дії використовується зворотний зв'язок для коригування дій,
що дозволяє забезпечити більш точне та стабільне управління в умовах змінних
параметрів або зовнішніх впливів.
3.1. Системи
прямої та непрямої дії
У теорії автоматичного
керування системи класифікують залежно від способу впливу регулятора на
керований об’єкт. Один із важливих критеріїв такої класифікації — це поділ на
системи прямої та непрямої дії, який визначає, яким
чином здійснюється корекція регульованого параметра. Візуальне
представлення цього поділу наведено в таблиці 3.1.
Таблиця 1 – Схеми САК прямої та непрямої дії
|
Схема САК |
|
|
прямої дії
швидкості об’єкта |
непрямої дії
швидкості об’єкта |
|
|
|
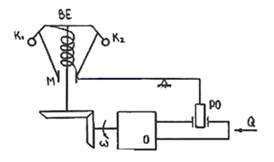
Системи прямої дії — це автоматизовані системи, в яких регулятор
безпосередньо впливає на зміну параметрів об’єкта без використання додаткових
пристроїв чи проміжних ланок. У таких системах управляючий сигнал від
регулятора безпосередньо змінює величину, що контролюється, що дозволяє швидко
реагувати на будь-які відхилення. Вимірювальний елемент фіксує швидкість
обертання об’єкта і одразу впливає на керуючий механізм, який коригує подачу
енергоносія Q. Якщо швидкість обертання ω збільшується, відцентрова сила
піднімає кулі К1 і К2, що змушує муфту М переміщатися, впливаючи на регулюючий
орган РО. Основною перевагою цієї системи є її простота та висока надійність.
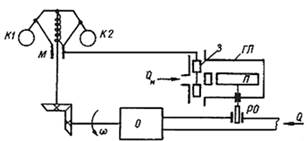
Системи непрямої дії — це такі системи, де регулятор впливає на
основну величину через допоміжні пристрої або проміжні параметри. Спочатку
регулятор змінює допоміжний параметр (наприклад, потужність нагрівача чи
швидкість насоса), який у свою чергу впливає на регульовану величину. У таких
системах сигнал від вимірювального елемента підсилюється перед тим, як вплинути
на регулюючий орган. У цьому випадку муфта М передає зусилля на золотник (3) гідропідсилювача. Коли золотник відхиляється від
нейтрального положення, він забезпечує подачу масла в верхню частину циліндра гідропідсилювача, що змушує поршень П рухатися вниз,
зменшуючи подачу енергоносія Q. Основними перевагами такої системи є висока
точність регулювання та покращені динамічні характеристики.
3.2.
Статичні та астатичні САК
Основною ознакою цих систем є вигляд регулювальної
характеристики, яка відображає залежність регульованої величини в статичному
стані від витрат робочого середовища. Приклади таких систем наведені в таблиці
2.
Статичною системою автоматичного керування (САК) називають
систему, в якій регульована величина при зміні зовнішніх збурень на об’єкті
варіюється в межах допустимих значень. Після завершення перехідного процесу, в
залежності від зовнішнього збурення, вона набуває різних сталих значень.
Регулювальна характеристика в загальному випадку має
вигляд У = С + Δ(Х), де
С – середнє значення регульованої величини Х;
Δ(Х) – функція збурення.
Необхідна умова якісного регулювання C>> Δ(Х).
Астатичною САК називають систему, в якій регульована
величина при зміні зовнішніх збурень після завершення перехідного процесу
набуває строго сталого значення при різних величинах зовнішніх збурень.
Таблиця
2 – Схеми САК
|
Астатична САК |
Статична САК |
|
|
|
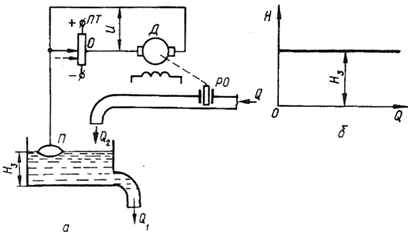
Розглянемо приклад астатичної та статичної систем автоматичного
регулювання (САР) рівня Н у резервуарі при зміні витрат робочого середовища Q.
Завданням обох систем є підтримання сталого рівня Н у резервуарі
при зміні витрат Q1.
У астатичній САР, коли витрати Q1 збільшуються, рівень Н
зменшується, що призводить до переміщення поплавка П вниз. Це, у свою чергу,
викликає зміну положення потенціометра ПТ відносно його початкового положення
„0”. На якірному колі двигуна Д виникає відповідна напруга „u” певної
полярності. Завдяки цьому двигун переміщує регулюючий орган системи РО, що
збільшує подачу рідини Q і підвищує рівень Н. Регулюючий орган рухається, поки
напруга на якірному колі не стане нульовою, що означатиме
досягнення рівня Н = Н3 і витрат Q = Q1 = Q2.
У астатичній системі може існувати лише одне стабільне положення
рівноваги, де регульована величина Н дорівнює Н3. Регулювальна характеристика Н
= f(Q) для астатичної системи є горизонтальною прямою.
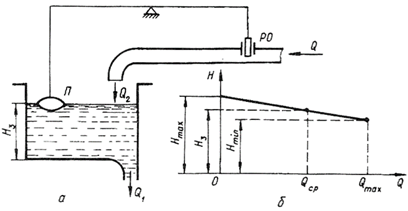
У статичній САР, при збільшенні витрат (Q1 > Q2), рівень Н і
поплавок переміщуються вниз. Це спричиняє переміщення регулюючого органу РО для
збільшення витрат робочого середовища Q2. Нове стабільне положення рівноваги
досягається при рівності витрат Q1 = Q2 = Q для нового рівня Н, який є меншим
за початковий. Тому статичні САР не можуть підтримувати регульовану величину на
строго сталому рівні, і можливі відхилення рівня Н від заданого, залежно від
витрат робочого середовища.
Регулювальна характеристика статичної САР після завершення
перехідного процесу має вигляд похилій прямої.
Питання для самоперевірки
1. Що таке система
прямої дії в автоматичному регулюванні?
2. Як працює
система непрямої дії?
3. У чому
відмінність між системами прямої та непрямої дії?
4. Які приклади
систем прямої дії можна зустріти в техніці?
5. Як можна застосувати систему непрямої дії в промисловості?
![]()
![]()