Тема 2. Види систем САР
У лекції
розглядаються різні види систем автоматизованого регулювання (САР), зокрема
відкриті та закриті системи. Пояснюється різниця між ними, де в закритих
системах є зворотний зв'язок для коригування помилок, а в відкритих —
відсутній. Окрім цього, будуть розглянуті лінійні та нелінійні системи, а також
стабільні та нестабільні САР, залежно від їх здатності підтримувати задані
параметри у змінних умовах.
2.1. Види систем автоматичного керування.
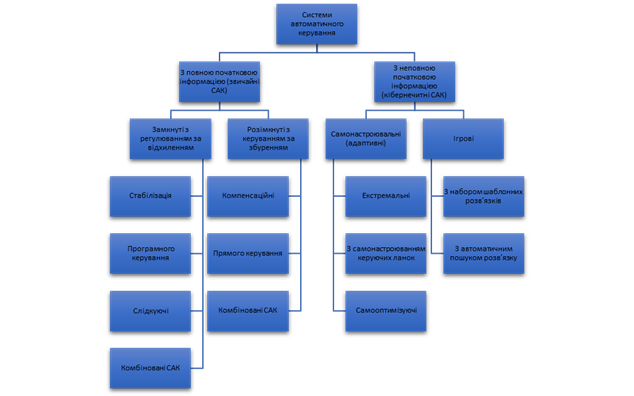
Рисунок 2.1 — Види САК
САК можна класифікувати за такими ознаками:
принципом керування, кількістю регульованих параметрів і контурів; виглядом
статичних і динамічних характеристик.
Коротко розглянемо основні особливості
окремих САК.
Системи з повною початковою інформацією. Такі
системи ще називають звичайними. Вони мають початкову інформацію, достатню для
розв’язання поставленого завдання на період всього часу роботи системи.
Замкнуті
САК також називають системами із зворотнім зв’язком (або САР).
В свою чергу САР поділяють на три групи, що
зображені на рисунку
Рисунок 2.1 — Види САК
Розімкнуті
системи автоматичного керування (САК) поділяються на два основних типи:
компенсаційні та програмні. Обидва типи працюють на основі принципу керування
за збуренням.
Компенсаційні системи створюють керуючі сигнали, які надходять на
вхід об’єкта і нейтралізують вплив зовнішніх збурень f(t)f(t)f(t), тим самим
забезпечуючи стабільність його роботи.
Системи програмного керування діють за заздалегідь
встановленою програмою без урахування зворотного зв’язку. Вони змінюють режим
роботи об’єкта відповідно до заданого сценарію. Прикладом є робота ліфта, в
якому електропривод керується за допомогою кінцевих вимикачів, що визначають зупинки
на поверхах.
Системи з неповною початковою інформацією, або кібернетичні САК, — це такі системи,
які в процесі функціонування отримують додаткові дані для прийняття рішень і
формування керуючих сигналів.
Кібернетичні
системи поділяються на два типи:
1.
Самонастроювальні системи (СНС)
— формують керуючі команди на основі аналізу взаємозв’язків між параметрами
об’єкта, збуреннями та характеристиками елементів системи;
2.
Ігрові системи — розраховані на
роботу в умовах невизначеності, коли необхідно враховувати можливі дії
супротивника або змінні умови середовища.
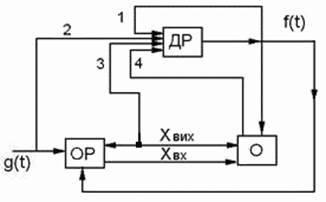
Рисунок 2.2 — Схема самоналаштовуюча
САР
Основною її особливістю є додатковий регулятор ДР., на
вхід 1-4 якого надходить інформація (рис.2.3.):
![]()
![]()
![]()

Рисунок 2.3 – Види інформації
Додатковий
регулятор в системі виконує обробку отриманої інформації та формує
коригувальний сигнал, який надходить на вхід основного регулятора (ОР). Це
забезпечує автоматичне налаштування системи, тобто її адаптацію до змін. У цій
ролі часто виступає електронно-обчислювальна машина (ЕОМ), здатна виконувати
логічні операції й приймати рішення. Прикладом самонастроювальної системи є
автопілот.
Ігрові системи в контексті теорії автоматичного керування (ТАК) — це такі, де
керування здійснюється в умовах взаємодії кількох учасників, які мають різні
цілі та діють за власними стратегіями. Аналіз таких систем базується на
положеннях теорії ігор, де кожен
учасник прагне досягти найбільш вигідного для себе результату або зменшити
ймовірність втрат.
Прикладом
ігрової системи можуть слугувати автоматизовані гоночні автомобілі — як у
симуляторі, так і в реальних змаганнях. Вони функціонують як автономні агенти,
які змагаються один з одним, аналізують дії суперників і динамічно
коригують свою тактику.
Елементи САК для гоночної системи:
1. Об'єкт керування (О) –
автономний гоночний автомобіль, який рухається трасою.
2. Зовнішні збурення (f₁(t), f₂(t), …, fₙ(t)) – дії суперників, зміни дорожніх умов, вплив вітру, тертя
шин об покриття.
3. Керуючий елемент (KE) –
алгоритм управління автомобілем, який аналізує стан траси, суперників та обирає
оптимальні траєкторії.
4. Вимірювальний елемент (ВЕ) –
датчики та системи комп’ютерного зору, які визначають швидкість, положення на
трасі та місцезнаходження суперників.
5. Задаючий вплив (Рз) – стратегія гонки
(наприклад, мінімізація часу проходження кола або блокування суперників).
6. Зворотний зв’язок (Xвих) – поточний стан автомобіля, що використовується для
коригування стратегії.
Ігрові системи автоматичного керування (ІСАК) мають низку
характерних особливостей. Наприклад, у випадку гоночних автомобілів кожна
машина функціонує як окремий автономний агент, що прагне здобути перемогу,
створюючи при цьому динамічні збурення у системі. Стратегії таких агентів
змінюються залежно від дій конкурентів — це може бути обгін, блокування або
захист позицій. Для реалізації адаптивного керування в таких умовах активно
застосовуються методи машинного навчання.
Ключові
риси ігрових систем:
1. Управління здійснюється в рамках складної системи з численними
взаємопов’язаними елементами;
2. Учасники системи мають суперечливі інтереси;
3. Поведінка учасників і зовнішні впливи можуть бути як
детермінованими (визначеними наперед алгоритмами), так і випадковими.
Ігрові САК поділяються на два основних типи (див. рисунок 2.4) — уточніть,
будь ласка, якщо потрібно описати ці типи.
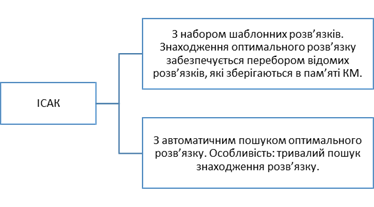
Рисунок 2.4 – Види ІСАК
Питання для самоконтролю
1.
Які бувають основні
види систем автоматичного регулювання?
2. Що таке розімкнена система регулювання?
3. Кібернетичні системи.
4. Назвіть види ІСАК.
5. Навіщо використовують
замкнені системи у техніці?
![]()
![]()