Тема 1. Основні поняттям САУ
У лекції розглядаються основні поняття систем автоматизованого
управління (САУ), їх складові, такі як датчики, виконавчі механізми, контролери
та зворотний зв'язок. Пояснюється, як ці елементи взаємодіють для забезпечення
ефективного управління в промисловості, енергетиці та транспорті. Також
розглядаються типи САУ та методи контролю.
Суть автоматизації полягає в
тому, щоб передати виконання завдань від людини до машин. Це може бути повна
передача, коли людина взагалі не бере участі в процесі (автоматичний процес),
або часткова, коли людина лише контролює або виконує деякі допоміжні функції
(автоматизований процес).
Рівень складності
автоматизованих процесів може значно відрізнятися. Наприклад, просте завдання –
це підтримання заданого рівня рідини в резервуарі, а складне – автоматичне
управління польотом літака.
Коли установка працює в
автоматизованому режимі, а такі установки зазвичай називають «об’єктами
автоматизації», роль людини зводиться до двох основних дій: або увімкнути
установку, або виконати деякі прості ручні операції. Тобто, основну роботу
виконує машина, а людина лише допомагає.
Для автоматизації
виробництва використовуються спеціальні автоматичні пристрої, які можна
класифікувати за різними критеріями. Під поняттям «пристрій» мається на увазі
самостійна конструкція, здатна працювати без додаткового втручання.
Автоматичні пристрої
класифікують за їх функціональним призначенням на кілька основних типів. Серед
них вирізняють системи контролю та сигналізації, захисні пристрої,
обчислювальні та лічильні механізми, а також системи автоматизованого
управління.
Системи контролю та
сигналізації використовуються для моніторингу технологічних процесів і умов у
приміщеннях. Вони можуть передавати попереджувальні сигнали у вигляді світлових
або звукових повідомлень, або ж поєднувати обидва типи оповіщення.
Захисні пристрої слугують
для запобігання аварійним ситуаціям, які можуть спричинити пошкодження
обладнання, псування продукції або загрожувати безпеці персоналу.
Обчислювальні та лічильні
механізми виконують складні розрахунки автоматично, без участі людини. Вони
застосовуються, наприклад, для визначення траєкторій польоту космічних апаратів
або оптимізації технологічних параметрів у виробництві.
Блокувальні пристрої
забезпечують захист від подання некоректних команд, що можуть призвести до
аварій. Так, вони запобігають одночасному дозволу на рух зустрічних поїздів на
одноколійній ділянці.
1.1. Система
автоматичного керування та її елементи
Система автоматичного
керування (САК) являє собою сукупність взаємодіючих компонентів, які разом із
керованим об’єктом (наприклад, механізмом чи робочою машиною) забезпечують
виконання управлінських функцій.
До основних елементів САК
входять: об’єкт керування, сенсорний (вимірювальний) елемент, керуючий блок і
виконавчий механізм.
Сенсор фіксує зміни у
вихідних параметрах об’єкта, які описуються функцією f(t). У ролі чутливих
елементів часто використовують датчики, що перетворюють фізичні величини —
тиск, швидкість, силу — на електричні сигнали, такі як струм, напруга або опір.
Керуючий елемент аналізує
дані від сенсора і формує відповідний сигнал для виконавчого органа. Часто він виконує також функцію підсилення сигналу.
Основними типами підсилювачів є електронні, напівпровідникові, магнітні, іонні,
а також електромеханічні. Серед гідравлічних і пневматичних рішень найбільше
застосування мають неелектронні підсилювачі.
Виконавчий механізм
відповідає за фізичну реалізацію дій, які необхідні для досягнення бажаного
режиму роботи об’єкта керування.
Коли всі елементи системи
автоматичного керування зображають у вигляді прямокутників, розміщених у
порядку їхньої взаємодії, і між ними вказують напрямок дії за допомогою
стрілок, отримується функціональна схема САК. Якщо до такої схеми додати
математичні описи — рівняння або графіки, які показують, як змінюються вихідні
параметри з часом, тобто характеризують динаміку роботи елементів, тоді ця
схема перетворюється на структурну. Окремі елементи таких схем називають
ланками.
1.2. Загальні
відомості про зворотні зв’язки
Розглянемо приклад керування
положенням гідравлічного приводу. Оператор вручну встановлює бажане положення
гідроциліндра, використовуючи важіль — механічний або гідравлічний. Зміна
положення важеля змінює напрямок і об’єм потоку робочої рідини, яка надходить у
гідроциліндр. Під впливом тиску рідина переміщує шток гідроциліндра вперед або
назад, забезпечуючи зміну положення механізму.
Оператор візуально контролює
положення штока і, у разі потреби, вручну коригує подачу рідини, змінюючи
швидкість або напрямок руху. При появі зовнішніх впливів, наприклад, зміни
навантаження або тиску в системі, оператор оперативно
реагує, регулюючи керування.
Основні елементи такої
системи:
1. Оператор – людина, яка вручну задає положення приводу;
2. Керуючий важіль – засіб зміни потоку рідини до гідроциліндра;
3. Гідравлічний насос – забезпечує подачу робочої рідини під тиском;
4. Гідроциліндр – об’єкт керування, який перетворює енергію рідини в механічний
рух;
5. Зовнішні збурення – фактори, що впливають на стабільність роботи системи
(навантаження, тиск, тертя);
6. Візуальний контроль – спосіб, за допомогою якого оператор оцінює і коригує роботу
системи вручну.
Позначивши
гідроциліндр – об’єкт керування – буквою „О”, а
збурення, що діють – f1(t), f2(t), … fn(t),
побудуємо відповідну функціональну схему САК (рис.1.1):
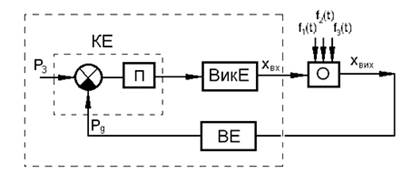
Рисунок 1.1 — Функціональна
схема (САК)
Функціональна схема системи
автоматичного керування (САК):
1. Задаючий пристрій (Рз) – задає бажане положення гідроциліндра.
2. Керуючий елемент (KE) – визначає
необхідний вплив для досягнення заданого положення.
3. Виконавчий елемент (ВикЕ) – регулює потік рідини до гідроциліндра (наприклад, клапан або
насос).
4. Об’єкт керування (О) – гідроциліндр,
який змінює своє положення під дією робочої рідини.
5. Зовнішні збурення (f₁(t), f₂(t), …, fₙ(t)) – впливи, які можуть змінювати положення гідроциліндра
(наприклад, зміна навантаження, тертя, температурні зміни рідини).
6. Вимірювальний елемент (ВЕ) –
датчик, що контролює поточне положення об’єкта керування.
7. Зворотний зв'язок (Xвих) – передає актуальне положення гідроциліндра у систему керування
для коригування сигналу.
Вузол
порівняння може бути позначений так (рис. 1.2.):
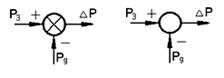
Рисунок 1.2 — Керуючий елемент
Особливістю
даної системи САК є замкнута функціональна схема. Такі САК називають системами автоматичного регулювання
(САР), або системами зі зворотним зв’язком. Всі елементи замкнутої САК, крім
об’єкта, об’єднуються єдиним поняттям – регулятор (Р). Спрощену функціональну
схему САК можна зобразити у вигляді двох елементів об’єкт і регулятора (рис.
1.3)
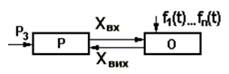
Рисунок 1.3 — Функціональна схема
Замикання
САК має виконуватися таким чином, щоб вихідна величина об’єкта хвих, що змінюється під впливом збурень f1(t)…fn(t), на виході регулятора була перетворена
регулятором так, щоб вихідна величина об’єкта хвх
діяла на об’єкт у напрямку, протилежному дії збурень. Даний зворотній зв’язок
називають головним від’ємним зворотнім зв’язком системи САР.
1.3. Принципи
автоматичного керування. Комбіновані системи автоматичного керування
Основою автоматичного
керування (АК) є принципи регулювання: за збуренням та за відхиленням.
Принцип керування за збуренням
полягає в тому, що при зміні зовнішнього збурення f(t)f, яке виявляє
вимірювальний елемент (ВЕ), на вхід об’єкта керування «О» подається сигнал хвххвххвх. Цей сигнал має впливати на об’єкт таким чином,
щоб змінити його режим роботи й компенсувати дію збурення, зберігаючи
стабільність вихідного параметра об’єкта (див. рис. 1.4).
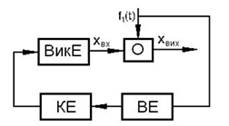
Рисунок 1.4 — Схема керування за збуренням
Особливість принципу
керування за збуренням полягає в застосуванні замкнених схем керування, у яких
відсутній автоматичний контроль вихідного параметра об’єкта. У таких системах
керуючий сигнал формується виключно на основі зафіксованого збурення.
Перевага цього підходу —
простота реалізації та висока надійність системи автоматичного керування у
випадках, коли присутнє лише одне значне збурення, а вплив інших можна не
враховувати.
Серед недоліків — складність
виявлення та вимірювання збурень у деяких технологічних процесах, а також дещо
нижча точність керування.
Щодо принципу керування за
відхиленням, він реалізується також у замкнених системах. Головна перевага
цього принципу — здатність системи реагувати на будь-яке відхилення фактичного
значення регульованого параметра від заданого, незалежно від того, що саме
спричинило це відхилення (див. рис. 1.5).
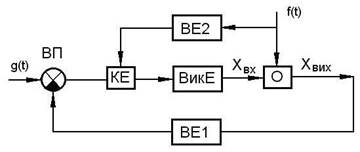
Рисунок 1.5 — Схема керування за відхиленням
На
практиці використовуються системи з комбінованим принципом керування. Вона має
два канали керування.
Один
з них діє за принципом керування за збуренням (ВЕ2 – КЕ – ВикЕ
– 0) і має розімкнутий контур.
А
другий – за принципом керування за відхиленням вихідної величини хвих від заданого значення g(t) і має замкнутий
контур (ВЕ1 – ВП – КЕ – ВикЕ – 0).
Основною
перевагою комбінованого керування є висока точність.
Питання для самоперевірки
1. Що таке система автоматичного управління
(САУ)?
2. Які основні частини має САУ?
3. Чим відрізняється замкнена САУ від розімкненої?
4. Що таке зворотний зв’язок у САУ?
5.
Назвіть принципи керування.
![]()
![]()