Лабораторна робота № 8
Тема: Аналіз стійкості в MATLAB за
коренями характеристичного рівняння.
Мета: дослідити систему автоматичного
керування на стійкість
MATLAB надає потужні
інструменти для дослідження стійкості систем автоматичного керування. Лінійна
система є стійкою тоді й лише тоді, коли всі корені її характеристичного
полінома розташовані в лівій півплощині комплексної площини коренів.
Ми вже знаємо, як
використовувати функцію roots. Наприклад, якщо характеристичний поліном має вигляд
B(s) = 2s^3+3s^2+2s+40, то
його корінь можна визначити в такий спосіб:
>> B= [2
3 2 40];
>> roots(B)
У результаті отримаємо
колонку, що містить шукані корені
ans =
-3.1722
+ 0.0000i
0.8361
+ 2.3676i
0.8361
- 2.3676i
Як бачимо, запропонована система буде не
стійкою.
Якщо
задано передатну функцію,
то можна скористатися
функцією pole, що обчислює полюси передатної
функції:
>> W=tf([1 0.5],[B])
Transfer function:
![]()
>> pole(W)
ans =
-3.1722 + 0.0000i
0.8361 + 2.3676i
0.8361 - 2.3676i
Функція pzmap
дозволяє відобразити на комплексній площині розташування полюсів і нулів
передавальної функції. Нулі позначаються кружечками, а полюси — хрестиками.
Якщо викликати pzmap без аргументів, діаграма
створюється автоматично (див. рис. 1).
>> pzmap(W)
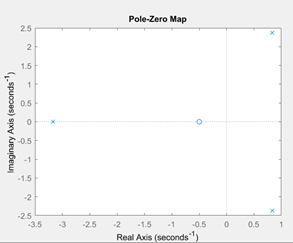
Рисунок 1 – Результат
виконання команди pzmap
Розглянемо приклад. Дослідити
стійкість системи керування водяним баком із нагрівачем. Керуючий елемент: потенціометр
(змінний резистор), що задає напругу U(t) (В). Виконавчий елемент: електричний нагрівач, що перетворює напругу
U(t) у потужність P(t) Вт. Об’єкт
управління: водяний бак, де температура T(t)° залежить від потужності. Вимірювальний елемент: термометр
(наприклад, термопара), що вимірює температуру T(t).
Визначимо, чи є задана система стійкої в
розімкнутому та замкненому стані,
лістинг 1
Лістинг 1 – Код програми
___________________________________________________________________
W_pot = tf(1, 1); % Потенціометр: W(s) = 1
W_n = tf(100, 1); % Нагрівач: W(s) = 100
W_bak = tf(0.05, [200 1]); % Бак: W(s) = 0.05
/ (200s + 1)
W_meas = tf(1, [1 1]); % Термометр: W(s) = 1 / (s + 1)
% Розімкнута система
W_open = W_pot * W_n
* W_bak * W_meas;
% Замкнена система
W_closed = feedback(W_open,
1);
roots_open = roots([200 201 1]); % Для відкритої: 200s^2 + 201s + 1
roots_closed = roots([200 201 6]); % Для замкненої: 200s^2 + 201s + 6
disp(roots_open);
disp(roots_closed);
figure;
subplot(1, 2, 1); pzmap(W_open);
title('Відкрита'); grid on;
subplot(1, 2, 2); pzmap(W_closed);
title('Замкнена'); grid on;
____________________________________________________________________Кінець лістингу 1
Результати розміщення коренів
на комплексній площині зображено на рисунку 2.
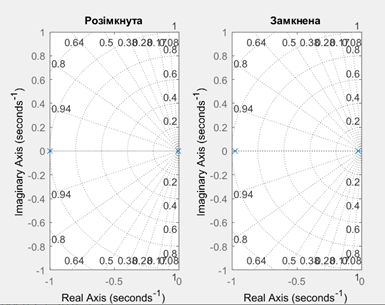
Рис. 2. Результат знаходження
коренів характеристичного рівняння системи
Отже, аналіз розташування
коренів на комплексній площині показує, що система є стійкою, оскільки всі
корені характеристичного рівняння знаходяться в лівій півплощині відносно
уявної осі.
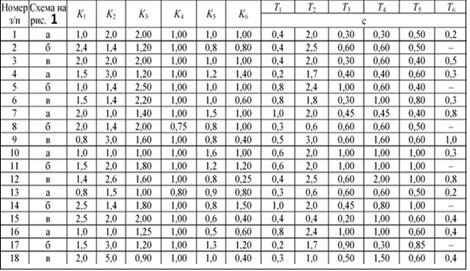
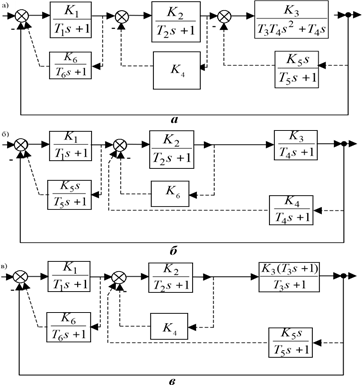
Завдання
Дослідити замкнуту систему на
стійкість за коренями характеристичного рівняння. Номер завдання залежить від
порядкового номера в журналі академічної групи.
Таблиця 1 – Варіанти завдань
![]()
![]()