Лабораторна робота №7
Тема. Дослідження статичних та динамічних
характеристик об’єктів управління
Мета роботи: дослідити статичні та динамічні характеристики типових об’єктів
управління. Визначити залежність вихідного сигналу від вхідного в стаціонарному
режимі (статичні характеристики) та поведінку під час перехідного процесу
(динамічні характеристики) при ступінчастому вхідному сигналі. Побудувати
відповідні графіки за допомогою MATLAB.
Об’єкти управління —
це елементи системи, що перетворюють вхідний сигнал x(t) у вихідний сигнал
y(t). Їхні характеристики поділяються на:
1.
Статичні: Залежність yст від xxx у стаціонарному режимі (при
t→∞).
2.
Динамічні: Поведінка y(t) під
час перехідного процесу (час реакції, коливання тощо).
Розглянемо три типові
об’єкти:
1. Підсилювальна
ланка:
–
передавальна функція: W(s)=K;
–
рівняння: y(t)=Kx(t);
–
K
— коефіцієнт підсилення;
–
статична характеристика: yст=Kx.;
–
динамічна характеристика: миттєва реакція.
2. Інерційна
ланка першого порядку:
–
передавальна функція: W(s)=K/Ts+1;
–
рівняння: Tdy(t)/dt+y(t)=Kx(t);
–
T
— стала часу, K
— коефіцієнт підсилення;
–
статична характеристика: yст=Kx;
–
динамічна характеристика: експоненційне наближення до
yст.
3. Інтегрувальна
ланка:
–
передавальна функція: W(s)=K/s;
–
рівняння: dy(t)/dt=Kx(t);
–
статична характеристика: не має стаціонарного значення при постійному x.
–
динамічна характеристика: лінійне зростання.
Характеристики для
аналізу:
1. Статичні:
yст
при різних x;
2. Динамічні:
час перехідного процесу (tp),
перерегулювання (σ), максимальне
відхилення від yст у відсотках,
форма перехідного процесу.
Вхідний сигнал: Ступінчастий сигнал x(t)=A при t≥0, де A
— амплітуда.
Для проведення експерементів з метою дослідження отриманих характеристик
необхідно:
1.
Налаштувати параметри об’єктів:
– Підсилювальна:
K=2 і K=5;
– Інерційна:
K=1, T=1с і T=2 с;
– Інтегрувальна:
K=0.5 і K=1;
2. Установити вхідний сигнал: x(t)=1 при
t≥0.
3.
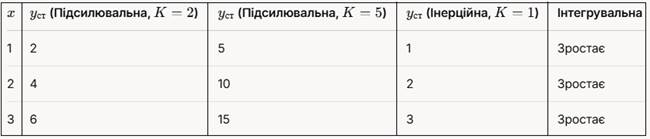
Дослідження статичних характеристик передбачає: для кожного об’єкта визначити yст при x=1, x=2, x=3.
4.
Дослідження динамічних характеристик передбачає наступні дії:
–
подати x(t)=1 на вхід кожної
ланки;
–
записати y(t) протягом 10 секунд.
Для
моделювання та побудови графіків використаємо MATLAB, лістинг 1 та рисунок 1.
Лістинг 1 – Побудова
графіків з використанням MATLAB
_______________________________________________________________________________
% Визначення часу моделювання
t = 0:0.01:10; % Час від 0 до 10 с із кроком 0.01 с
% Вхідний сигнал x(t) = 1
x = ones(size(t));
% 1. Підсилювальна ланка
K1 = 2; K2 = 5;
y_amp1 = K1 * x; % K = 2
y_amp2 = K2 * x; % K = 5
% 2. Інерційна ланка першого порядку
K_inert = 1;
T1 = 1; T2 = 2;
y_inert1 = K_inert * (1 - exp(-t/T1)); % T = 1 с
y_inert2 = K_inert * (1 - exp(-t/T2)); % T = 2 с
% 3. Інтегрувальна ланка
K_int1 = 0.5; K_int2 = 1;
y_int1 = K_int1 * t; % K = 0.5
y_int2 = K_int2 * t; % K =
% Статичні характеристики
x_static = 0:0.5:3; % Різні значення вхідного сигналу
y_static_amp1 = K1 * x_static; %
Підсилювальна, K = 2
y_static_amp2 = K2 * x_static; %
Підсилювальна, K = 5
y_static_inert = K_inert * x_static; % Інерційна
% Побудова графіків
figure('Name', 'Дослідження характеристик
об’єктів управління', 'NumberTitle', 'off');
% Графік 1: Підсилювальна ланка (динамічні)
subplot(3, 2, 1);
plot(t, y_amp1, 'b-', 'LineWidth', 1.5, 'DisplayName', 'K = 2');
hold on;
plot(t, y_amp2, 'r-', 'LineWidth', 1.5, 'DisplayName', 'K = 5');
plot(t, x, 'k--', 'LineWidth', 1, 'DisplayName', 'x(t) = 1');
hold off;
title('Підсилювальна ланка (динамічна)');
xlabel('Час, с'); ylabel('y(t)');
legend('show'); grid
on;
% Графік 2: Інерційна ланка (динамічна)
subplot(3, 2, 3);
plot(t, y_inert1, 'b-', 'LineWidth', 1.5,
'DisplayName', 'T = 1 с');
hold on;
plot(t, y_inert2, 'r-', 'LineWidth', 1.5,
'DisplayName', 'T = 2 с');
plot(t, x, 'k--', 'LineWidth', 1, 'DisplayName', 'x(t) = 1');
hold off;
title('Інерційна ланка (динамічна)');
xlabel('Час, с'); ylabel('y(t)');
legend('show'); grid
on;
% Графік 3: Інтегрувальна ланка (динамічна)
subplot(3, 2, 5);
plot(t, y_int1, 'b-', 'LineWidth', 1.5, 'DisplayName', 'K = 0.5');
hold on;
plot(t, y_int2, 'r-', 'LineWidth', 1.5, 'DisplayName', 'K = 1');
plot(t, x, 'k--', 'LineWidth', 1, 'DisplayName', 'x(t) = 1');
hold off;
title('Інтегрувальна ланка (динамічна)');
xlabel('Час, с'); ylabel('y(t)');
legend('show'); grid
on;
% Графік 4: Статичні характеристики
subplot(3, 2, [2, 4]);
plot(x_static, y_static_amp1, 'b-', 'LineWidth', 1.5, 'DisplayName',
'Підсилювальна, K = 2');
hold on;
plot(x_static, y_static_amp2, 'r-', 'LineWidth', 1.5, 'DisplayName',
'Підсилювальна, K = 5');
plot(x_static, y_static_inert,
'g-', 'LineWidth', 1.5, 'DisplayName',
'Інерційна, K = 1');
hold off;
title('Статичні характеристики');
xlabel('x'); ylabel('y_{ст}');
________________________________________________________________________________
Кінець
лістингу 1
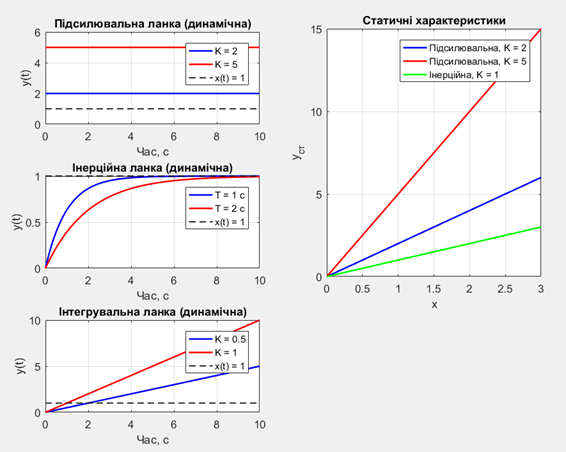
Рисунок 1 – Динамічні та статичні
характеристики
Результати експерименту представлені в
таблиці 1 та 2.
Таблиця 1 –
Статичні характеристики
Таблиця 2 – Динамічні
характеристики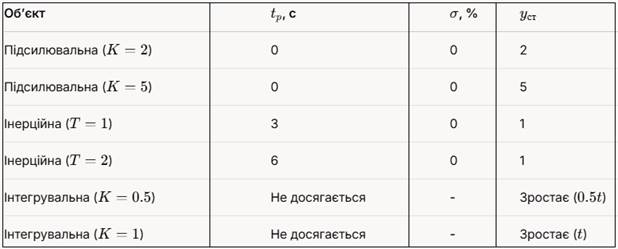
Висновки:
1. Підсилювальна ланка має лінійну
статичну характеристику та миттєву динамічну реакцію.
2. Інерційна ланка демонструє
пропорційну статичну залежність і плавний перехідний процес, залежний від T.
3. Інтегрувальна ланка нестабільна в
стаціонарному режимі, її вихід лінійно зростає з часом.
Приклад. Дослідити
статичні та динамічні характеристики об’єкта. Об’єкт управління —
водяний бак із електричним нагрівачем — перетворює вхідний сигнал (потужність
нагрівача P(t), Вт) у вихідний сигнал (температуру води T(t) °C). Модель
об’єкта наближено описується інерційною ланкою першого порядку.
Параметри об’єкта:
–
K=0.05 °C/Вт
(визначається теплоємністю води та тепловтратами),
–
T=200 с (для
бака об’ємом 10 л з помірною ізоляцією).
Вхідний сигнал:
P(t)=200 Вт при t≥0.
Побудову
характеристик проведемо за допомогою Matlab, лістинг 2 та рисунок 2
Лістинг
2 – Програма в Matlab
____________________________________________________________________
% Параметри
K = 0.05; % Коефіцієнт підсилення (°C/Вт)
T = 200; % Стала часу (с)
t = 0:1:1000; % Час (с)
% Вхідний сигнал: P = 200 Вт
P = 200 * ones(size(t));
T_st = K * P; % Стаціонарна температура
% Динамічна характеристика
T_t = K * P .* (1 - exp(-t/T));
% Статична характеристика
P_static = 0:50:300;
T_static = K * P_static;
% Побудова графіків
figure('Name', 'Характеристики водяного
бака', 'NumberTitle', 'off');
% Динамічна характеристика
subplot(2, 1, 1);
plot(t, T_t, 'b-', 'LineWidth',
1.5, 'DisplayName', 'T(t)');
hold on;
plot(t, T_st, 'r--', 'LineWidth',
1, 'DisplayName', 'T_{ст} =
10 °C');
hold off;
title('Динамічна характеристика (P = 200 Вт)');
xlabel('Час, с'); ylabel('Температура, °C');
legend('show'); grid
on;
% Статична характеристика
subplot(2, 1, 2);
plot(P_static, T_static,
'b-', 'LineWidth', 1.5);
title('Статична характеристика');
xlabel('Потужність, Вт'); ylabel('T_{ст}, °C');
grid on;
________________________________________________________________________________
Кінець
лістингу 2
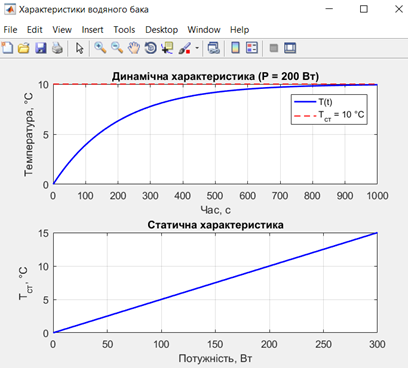
Рисунок 2 – Характеристики водяного бака
Аналіз результатів:
1. Статичні
характеристики:
–
Tст=0.05⋅P, наприклад, при
P=200 Вт;
–
температура стабілізується на 10 °C;
–
залежність лінійна, підтверджена
графіком.
2. Динамічні
характеристики:
–
температура T(t) зростає експоненційно до 10 °C;
–
час перехідного
процесу tp≈600 с,
перерегулювання відсутнє.
Графіки показують плавне наближення до Tст і лінійну залежність Tст від P.
Завдання
для виконання
1. Резистор у підсилювачі:
- Вхід: Напруга
(В)
- Вихід: Напруга
(В)
–
Обчисліть вихідну напругу при вхідній 5 В і коефіцієнті
підсилення 3
2. Водяний бак із
нагрівачем:
–
Вхід: Потужність (Вт)
–
Вихід: Температура (°C)
–
Визначте стаціонарну температуру при 300 Вт і K=0.04 °C/Вт.
3. Електродвигун
із вантажем:
–
Вхід: Напруга (В)
–
Вихід: Кут повороту (рад)
–
Побудуйте в MATLAB графік кута повороту за 10 с при 12 В
4. Пружинно-демпферна
система:
–
Вхід: Сила (Н)
–
Вихід: Положення (м)
– Знайдіть максимальне переміщення при силі 10 Н за 5 с
5. Трубопровід із
рідиною:
–
Вхід: Тиск (Па)
–
Вихід: Тиск (Па)
–
Визначте затримку реакції, якщо вихід змінюється через 2 с
6. Конденсатор у
RC-колі:
–
Вхід: Напруга (В)
–
Вихід: Напруга (В)
–
Обчисліть час досягнення 63% від 10 В при RC=1 с
7. Гідравлічний
акумулятор:
–
Вхід: Витрата (л/с),
–
Вихід: Тиск (Па).
–
Знайдіть тиск через 5 с при витраті 2 л/с і K=1000 Па/(л/с)
8. Механічний
маховик:
–
Вхід: Момент (Н·м)
–
Вихід: Кутова швидкість
(рад/с)
–
Побудуйте графік швидкості за 8 с при моменті 5 Н·м
9. Термічний
датчик із затримкою:
–
Вхід: Температура (°C)
–
Вихід: Показання (°C
–
Визначте час реакції, якщо затримка 3 с, а температура входу 50
°C
10. Електромагнітний клапан:
–
Вхід: Напруга (В)
–
Вихід: Швидкість штока (м/с)
–
Обчисліть швидкість при стрибку напруги від 0 до 10 В за 1 с
![]()
![]()