Лабораторна робота №6
Тема. Вивчення впливу зворотних зв’язків на
характеристики типових динамічних ланок
Мета:
дослідити, як негативний та позитивний зворотній зв’язок впливають на динамічні
характеристики (перехідний процес, стійкість, швидкодію) типових динамічних
ланок.
Системи автоматичного керування (САК) будуються на основі динамічних ланок, які описують поведінку об'єкта
керування у часі. Для забезпечення стабільності, точності та швидкодії таких
систем широко застосовуються зворотні зв’язки.
Зворотній зв’язок — це передача інформації про поточний стан виходу системи на її
вхід для корекції керуючого сигналу (рис. 1).
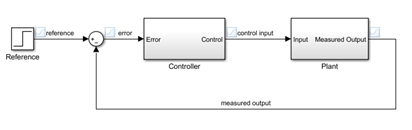
Рисунок 1 – САК зі зворотнім зв’язком
У
системах автоматичного керування зворотній
зв’язок дозволяє:
1. Поліпшити точність системи
2. Зменшити вплив збурень
3. Змінити динамічні характеристики
системи
Види зворотних зв’язків:
1.
Негативний зворотній зв’язок – зменшує похибку між
бажаним і реальним значенням, підвищує стійкість.
2.
Позитивний зворотній зв’язок – посилює відхилення,
може призводити до нестійкості.
Для системи з одиничним негативним зворотнім
зв’язком:
![]() (1)
(1)
Для позитивного зворотного зв’язку:
![]() (2)
(2)
Вплив зворотного зв’язку на характеристики системи подано в таблиці 1.
Таблиця 1 – Вплив зворотніх зв’язків на системи
|
Характеристика |
Відкрита система |
Замкнена з негативним зв’язком |
|
Точність |
Залежить від збурень |
Покращується |
|
Швидкодія |
Повільна/середня |
Може зростати |
|
Стійкість |
Не гарантується |
Часто покращується |
|
Перерегулювання |
Зазвичай більше |
Може зменшитись |
|
Вплив збурень |
Прямий |
Зменшується |
Алгоритм дій для дослідження
системи зі зворотнім зв’язком:
1.
Ініціалізувати середовище Simulink
через інтерфейс MATLAB.
2.
У вікні Simulink
натисни "Blank Model".
3.
Відкрити вікно бібліотек блоків, використовуючи Simulink
Library Browser.
4.
Побудова відкритої системи (без зворотного зв’язку): додай такі блоки (через Library Browser або пошук):
– назва блоку: Step, Transfer Function, Scope;
– з’єднати : Step
→ Transfer Function
→ Scope.
– Step:
- Step time: 0;
- Initial value: 0;
- Final value: 1.
– Transfer Function:
– Numerator:
[1];
– Denominator:
[1 1].
5.
Додавання негативного зворотного зв’язку(рис.
2):
– Sum: Math Operations;
– Feedback.
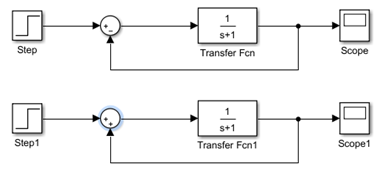
Рисунок 2 – Модель САК зі зворотнім зв’язком в Simulink
Приклад, дослідити модель впливу негативного зворотного зв'язку на ланку другого порядку (коливальну) зі
статичним передаточним коефіцієнтом k = 3 і постійними часу Т1=![]() , T2 = 0,2. Встановлюємо значення коефіцієнта НЗЗ рівне 0,5 і
присвоїти досліджуваній ланці і зворотному зв'язку відповідні найменування.
, T2 = 0,2. Встановлюємо значення коефіцієнта НЗЗ рівне 0,5 і
присвоїти досліджуваній ланці і зворотному зв'язку відповідні найменування.
Проводимо побудову моделі і запускаємо процес
моделювання вибором команди Start меню Simulation і визначаємо на екранах осцилографів перехідні
функції інерційної ланки другого порядку і тієї ж ланки, охопленої негативним
та позитивним ЗЗ (рис. 2)
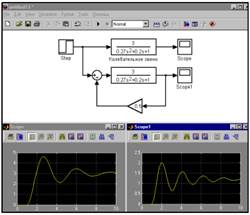
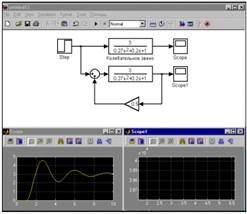
Рисунок 2
– Симуляція моделі ланки другого порядку зі зворотнім зв’язком
Завдання для виконання
Завдання 1.
Побудова моделі розімкнутої системи:
1.
В Simulink створіть модель з ланкою: подайте на вхід сигнал Step;
2.
Спостерігайте перехідну характеристику у Scope;
3. Зафіксуйте
параметри: час наростання, час встановлення, перерегулювання.
Завдання 2. Додати негативний зворотній зв’язок:
1.
Додайте блок Feedback
у Simulink;
2.
Замкніть систему з одиничним зворотнім зв’язком;
3.
Повторіть моделювання;
4.
Порівняйте: час
встановлення, перерегулювання, стабільність.
Завдання 3.
Дослідити позитивний зворотній зв’язо:
1.
Замініть знак зворотного зв’язку на позитивний (інверсія);
2.
Проведіть моделювання з тими самими параметрами;
3.
Прослідкуйте, чи
система стає нестійкою. Зробіть висновки.
Завдання 4. Вплив коефіцієнта підсилення у зворотньому
зв’язку:
1.
Додайте коефіцієнт k у зворотному ланцюгу;
2.
Змініть k
від 0.1 до 5;
3.
Спостерігайте, як змінюється поведінка системи.
Результати експериментів занести в таблицю:
|
Тип зв’язку |
Час встановлення, с |
Перерегулювання, % |
Висновок |
|
Відкрита |
|
|
Базова
динаміка |
|
Негативний |
|
|
Покращення,
зменшення помилки |
|
Позитивний |
|
|
Можлива
нестабільність |
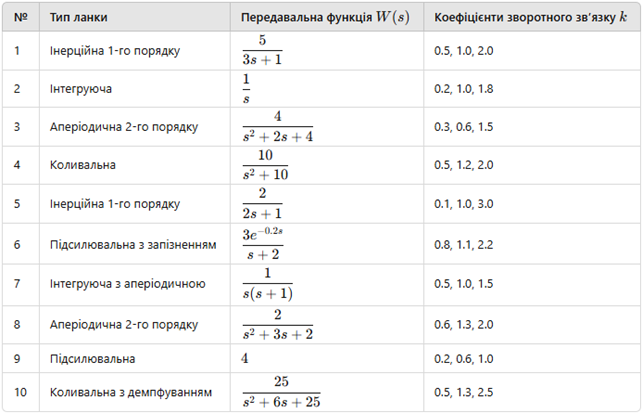
Таблиця 2 – Індивідуальні завдання
![]()
![]()