Тема: Дослідження динамічних
характеристик типових динамічних ланок за допомогою MATLAB.
Типові динамічні ланки поділяють на 3
основні групи (рис. 1) та види подані в таблиці 1.
Рисунок 1 – Групи ланок
Таблиця 1 –
Основні види ланок
|
№ |
Тип ланки |
Диференціальне рівняння |
Передатна функція |
|
1 |
Аперіодична ланка |
де Т - Постійна часу ланки; k – коефіцієнт
посилення. |
|
|
2 |
Коливальна ланка ІІ-го порядку |
Якщо виконується умова ξ < 1,
то ланка є коливальною, якщо ξ > 1, ми маємо справу з аперіодичним
ланкою II-го порядку, яке описується тим самим рівнянням, як і коливальна
ланка. |
де |
|
3 |
Інтегруюча ланка |
|
|
|
4 |
Інтегруюча ланка із запізненням |
|
|
|
5 |
Ізодромна ланка |
|
|
|
6 |
Ідеальна ланка |
|
|
|
7 |
Диференціююча ланка із запізненням |
|
|
Всі статичні ланки в режимі, що встановився,
описуються однаковим рівнянням![]() . До таких ланок
відносяться: статичне ідеальне (підсилювальне), аперіодичне, коливальне та
консервативне.
. До таких ланок
відносяться: статичне ідеальне (підсилювальне), аперіодичне, коливальне та
консервативне.
Для виконання лабораторної
роботи використовується пакет прикладних програм (ППП) Control System Toolbox,
який входить до складу середовища MATLAB. Цей програмний пакет призначений для
аналізу, моделювання та проєктування систем
автоматичного керування на основі моделей із лінійною часовою інваріантністю
(LTI — Linear Time-Invariant).
Control System Toolbox
забезпечує широкі можливості для роботи з передатними функціями, матрицями
стану, а також для побудови та аналізу частотних і часових характеристик
динамічних систем.
Основні характеристики
типових динамічних ланок можуть бути отримані за допомогою вбудованих команд
MATLAB, таких як:
–
step — побудова перехідної характеристики;
–
impulse — побудова імпульсної характеристики;
–
bode — амплітудно-фазова частотна характеристика (АЧХ та ФЧХ);
–
nyquist — діаграма Найквіста;
–
ltiview — інтерактивне вікно для перегляду характеристик LTI-систем.
Послідовність виконання
лабораторної роботи:
1.
Ознайомлення з теоретичними основами. Перед початком роботи слід
вивчити теоретичні принципи функціонування лінійних динамічних систем, зокрема
аперіодичних, коливальних, інтегруючих та диференціюючих
ланок.
2.
Запуск MATLAB та підготовка робочого середовища. Відкрити MATLAB
та переконатися, що доступний пакет Control System Toolbox.
3.
Моделювання аперіодичних ланок із різними коефіцієнтами
підсилення.
За допомогою команди tf створити передатні функції
для різних значень коефіцієнта підсилення K відповідно до варіанта завдання.
4.
Аналіз впливу коефіцієнта підсилення на характеристики ланок.
Побудувати часові (step, impulse)
і проаналізувати, як змінюється поведінка системи при зміні K.
5.
Дослідження впливу сталої часу T на поведінку аперіодичних
ланок. Повторити кроки 3-4 для передатних функцій з різними значеннями T,
проаналізувавши відповідні характеристики.
6.
Моделювання інших типових динамічних ланок. Побудувати передатні
функції та визначити характеристики:
–
коливальної ланки;
–
інтегруючої ланки (наприклад, 1\s);
–
диференційної ланки (наприклад, s).
7. Провести
порівняння часових та частотних характеристик усіх досліджених ланок,
підкреслюючи їхні особливості та відмінності.
Приклад. Дана передатна функція аперіодичної ланки:
![]() ; k = 0,2; T = 7.
; k = 0,2; T = 7.
Визначимо його тимчасові та частотні характеристики.
1. Створимо LTI-об'єкти w1, w2, w3 з різними значеннями k:
>> k = 0.2;
>> T = 7;
>> w1=tf([k],[T,1])
>> w2=tf([k*2],[T,1])
>> w3=tf([k*4],[T,1])
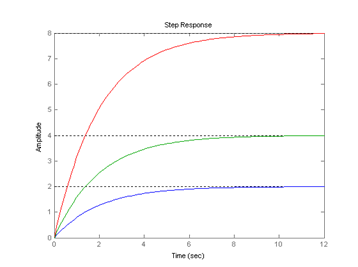
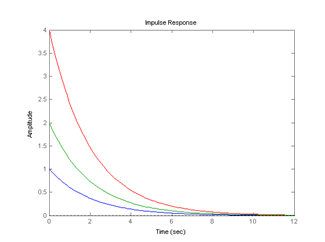
2. Побудуємо для отриманих передатних функцій динамічні характеристики,
використовуючи команди step, impulse:
>> step (w1, w2, w3):
>> impulse(w1,w2,w3):
3. Створимо LTI-об'єкти h1, h2, h3 з різними значеннями постійного часу Т:
>> h1=tf([k],[T,1]);
>> h2=tf([k],[2*T,1]);
>> h3=tf([k],[4*T,1]);
4. Аналогічно п.2 для знайдених передатних функцій отримаємо динамічні
характеристики:
>> step (h1, h2, h3);
>> impulse(h1,h2,h3);
5.
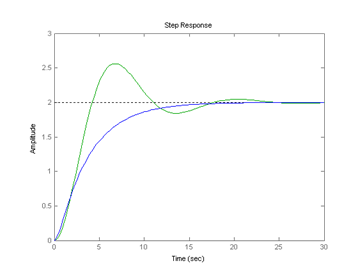
Досліджуємо вплив зміни параметрів коливальної ланки
на його часові та частотні характеристики.
6.
Створимо передавальні функції ланки відповідно до
заданого варіанту, змінюючи коефіцієнт посилення:
![]() ; k = 2; T1 = 1.5; T2 = 2.
; k = 2; T1 = 1.5; T2 = 2.
>> w1=tf([k],[4,1.5,1]);
>> w2=tf([k*2],[4,1.5,1]);
>> w3=tf([k*4],[4,1.5,1]);
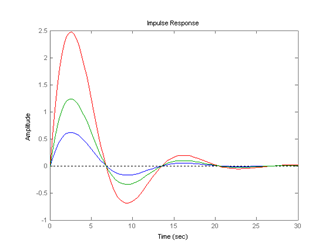
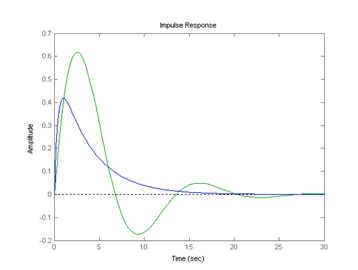
7. Отримаємо динамічні характеристики:
>> step (w1, w2, w3):

>> impulse(w1,w2,w3):
8. Змінимо значення постійних часу в передавальній
функції:
Т1 = 4, Т2 = 1.5.
>> w1=tf([k],[1.5,4,1]);
Для порівняння візьмемо вихідну передатну функцію
коливальної ланки:
>> w2=tf([k],[4,1.5,1]);
9.
Побудуємо динамічні
характеристики.
>> step(w1,w2):
>> impulse(w1,w2):
Завдання для виконання
Вид передавальної функції:
1. ![]() ;
;
2. ![]() ;
;
3. ![]() .
.
Таблиця 2 – Варіанти завдань
|
№ варіанта |
k |
T |
T1 |
T2 |
Ти |
|
1. |
1 |
2 |
9 |
2 |
2 |
|
2. |
3 |
7 |
7 |
2 |
3.5 |
|
3. |
2 |
9 |
6 |
1 |
4 |
|
4. |
6 |
4 |
6 |
4 |
7.2 |
|
5. |
3.5 |
12 |
1.5 |
2 |
6 |
|
6. |
4 |
3 |
2 |
3 |
1.3 |
|
7. |
2 |
8 |
4 |
3 |
2.7 |
|
8. |
2.2 |
6 |
3 |
2 |
5 |
|
9. |
3 |
4 |
2.5 |
2 |
5.5 |
|
10. |
1.5 |
8 |
1 |
4 |
8 |
|
11. |
1.3 |
6 |
1.8 |
3 |
8.1 |
|
12. |
1 |
1 |
8 |
3 |
2.7 |
![]()
![]()