Практична робота №12
Тема: Синтез та моделювання роботи
регулятора для САР часовими методами
Мета роботи:
Ознайомитися з методами синтезу регуляторів для систем автоматичного
регулювання (САР), провести моделювання їхньої роботи в MATLAB, проаналізувати
вплив параметрів регулятора на динамічні характеристики системи.
Система
автоматичного регулювання (САР) призначена для підтримання заданої величини
(наприклад, температури, швидкості) на об’єкті керування за допомогою
регулятора. Найпоширеніші типи регуляторів:
1. Пропорційний
(П): Wr(s)=Kp реагує пропорційно відхиленню.
2. Пропорційно-інтегральний (ПІ): Wr(s)=Kp+Ki/s усуває статичну
похибку.
3. Пропорційно-інтегрально-диференціальний
(ПІД): Wr(s)=Kp+Ki/s+Kds враховує швидкість зміни відхилення.
Синтез
регулятора полягає у виборі його типу та налаштуванні параметрів (Kp, Ki, Kd)
для забезпечення стійкості, швидкодії та мінімальної похибки. Моделювання в
MATLAB дозволяє оцінити перехідні процеси та перевірити стійкість системи.
В даній
роботі вибір структури та параметрів регуляторів виконується на основі аналізу
перехідної характеристики замкнутої системи.

Рисунок 1
– Структурна схема замкнутої системи
Така
характеристика обчислюється для кожного варіанту побудови регулятора методом
математичного моделювання за допомогою програми Matlab.
Алгоритм
дослідження передбачає виконання певної послідовності.
1. Аналіз
об’єкта керування:
–
задати передаточну функцію об’єкта: W(s)=1/ s (s+2) (інтегруюча
ланка з інерцією);
–
визначити особливості об’єкта: система другого порядку, нестабільна без
регулятора через інтегруючий характер.
2. Вибір
типу регулятора:
– обрати ПІ-регулятор (Wr(s)=Kp+Ki/s для усунення статичної похибки та
забезпечення стійкості;
– записати пояснення: ПІ-регулятор підходить, бо
П-регулятор не усуває похибку, а ПІД може бути складнішим для синтезу в цій
задачі.
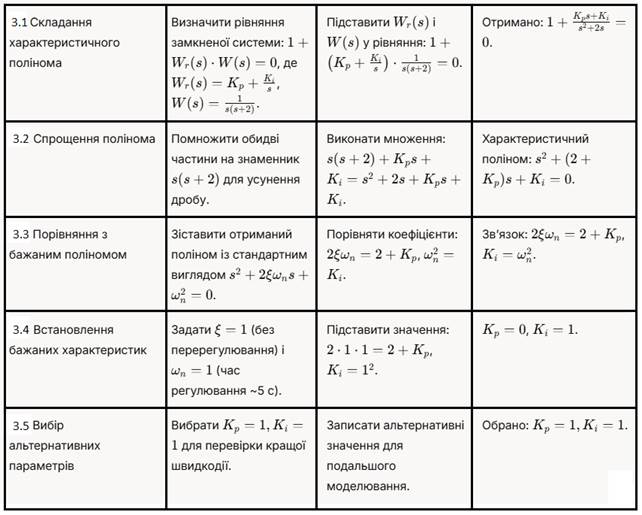
3.
Синтез параметрів регулятора, таблиця 1
Таблиця 1 – Покроковий алгоритм
синтезу регулятора
4. Побудова моделі в MATLAB,
лістинг 1
Лістинг 1 – Програмна реалізація в MATLAB
W_obj = tf(1, [1 2 0]);
% Об’єкт: 1/(s(s+2))
Kp = 1;
Ki = 1;
W_reg = tf([Kp Ki], [1 0]); % ПІ-регулятор: Kp + Ki/s
W_closed = feedback(W_reg * W_obj, 1); % Замкнена
система
% Моделювання перехідного
процесу
figure;
step(W_closed, 10); % Перехідний процес за
10 с
grid on;
title('Перехідний процес САР із ПІ-регулятором');
xlabel('Час (с)');
ylabel('Вихідна величина');
info = stepinfo(W_closed);
disp('Характеристики перехідного процесу:');
disp(['Час регулювання: ', num2str(info.SettlingTime),
' с']);
disp(['Перерегулювання:
', num2str(info.Overshoot), ' %']);
Кінець лістингу 1
За допомогою інструментального
пакету Simulink реалізація ПІД- регуляторів для об’єкту
керування з передаточною функцією (рис. 2).
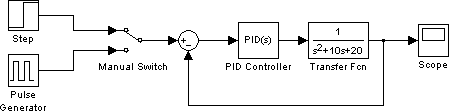
Рисунок 2
– Модель об’єкту в Simulink
5. Аналіз результатів:
– оцінити
результати для Kp=1, Ki=1:
час регулювання (~4с), перерегулювання (~10%);
–
змінити
Kp=0.5, Ki=1 у коді,
запустити знову та записати: час регулювання (~5 с), перерегулювання
(~0%);
–
порівняти
з вимогами (час ≤ 5 с, без перерегулювання).
Висновки. Синтезовано ПІ-регулятор для W(s)=1 /s (s+2)
:
1. Kp=0.5, Ki=1 забезпечує час регулювання 5 с без перерегулювання.
2. Kp=1, Ki=1 K_p = 1 дає
швидший відгук (~4 с) із малим перерегулюванням
(~10%).
3. Kp впливає
на швидкодію, Ki усуває
статичну похибку.
Додаткове
завдання: змінити параметри в коді: Kp=2, Ki=0.5, запустити моделювання; записати нові характеристики
(час, перерегулювання) і порівняти з попередніми;
додати Kd=0.1 промоделювати та
описати зміни.
Завдання до виконання
1. Скласти
характеристичний поліном замкненої системи.
2. Підібрати параметри
регулятора (Kp, Ki, Kd) аналітично або методом проб.
3. Використати MATLAB
(функції tf, feedback, step) для моделювання.
4. Проаналізувати час
регулювання, перерегулювання та стійкість.
Таблиця 2
– Варіанти завдань
|
№ варіанту |
Завдання |
||
|
Об’єкт |
Регулятор |
Завдання |
|
|
1 |
|
П |
Синтезувати Kp
для часу регулювання ≤ 3с. Побудувати перехідний процес у MATLAB. |
|
2 |
|
ПІ |
Розробити ПІ-регулятор для стійкості та часу
регулювання ~4с без перерегулювання. Моделювання в
MATLAB. |
|
3 |
|
ПІД |
Синтезувати ПІД для перерегулювання
<5% і часу регулювання ≤ 2с. Перевірити в MATLAB. |
|
4 |
|
П |
Визначити максимальне Kp
для стійкості. Побудувати перехідний процес у MATLAB. |
|
5 |
|
ПІ |
Синтезувати ПІ для нульової похибки та часу
регулювання ~3с. Проаналізувати в MATLAB. |
|
6 |
|
П |
Підібрати Kp для перерегулювання ≤ 10%. Промоделювати в MATLAB,
записати час регулювання. |
|
7 |
|
П |
Забезпечити стійкість і час регулювання ~5с.
Перевірити перехідний процес у MATLAB. |
|
8 |
|
ПІД |
Розробити ПІД для часу регулювання ~4с і перерегулювання <8%. Побудувати графік у MATLAB. |
|
9 |
|
П |
Визначити максимальне Kp
для стійкості. Промоделювати перехідний процес у MATLAB. |
|
10 |
|
ПІ |
Синтезувати ПІ для нульової похибки та часу
регулювання ~3с без перерегулювання. Порівняти з
П-регулятором у MATLAB. |
![]()
![]()