Тема. Основні
принципи САР
Мета: ознайомитися і засвоїти існуючі принципи
керування, що використовуються в сучасних системах автоматичного керування
Система
автоматичного керування включає керуючі пристрої (КП) та об’єкт керування (ОК).
Величини, що описують стан ОК, називаються вихідними або керованими. Впливи,
які надходять на вхід КП, іменуються задаючими.
Впливи, що формуються КП і безпосередньо змінюють стан ОК, називаються
керуючими. Впливи, які спричиняють небажане відхилення керованої величини від
заданого значення, позначають як збурюючі дії. Задаючі та збурюючі дії
об’єднують у групу вхідних впливів.
Під час
функціонування об’єкт керування зазнає різноманітних зовнішніх збурень, через
що керована величина відхиляється від потрібного значення. Для підтримання
відповідності керованої величини заданому рівню керуючий пристрій передає на
об’єкт керування відповідну керуючу дію.
Залежно
від способу визначення керуючої дії, необхідної для усунення відхилення
керованої величини від заданого значення, виділяють чотири основні принципи
керування:
1. Керування за задаючою дією, або принцип розімкнутого керування;
2. Керування за збуренням,
коли керуюча дія на об’єкт залежить від задаючої
величини та однієї чи кількох зовнішніх дій на ОК;
3. Керування за
відхиленням, коли керуюча дія формується залежно від різниці між фактичним і
заданим значенням керованої величини;
4. Комбіноване керування,
коли керуюча дія визначається з урахуванням кількох факторів, таких як задаюча дія, збурення та відхилення.
Принцип
зворотного зв'язку. Для можливості контролю параметрів об'єкта керування і для
покращення характеристик систем автоматики передбачають лінії зворотного
зв'язку.
Лінії
зворотного зв'язку – це лінії
зв'язку, по яких інформація передається в зворотному напрямку в порівнянні з
керуючим впливом.
В автоматичних системах використовуються такі
види зворотного зв'язку: додатний, від’ємний, жорсткий, гнучкий, головний,
додатковий.
Найбільше
розповсюдження в автоматичних системах керування отримав принцип зворотного зв'язку (рис. 1). Тут
керуючий вплив корегується пристроєм КП в залежності від вихідної величини
y(t). І вже не важливо, які збурення діють на ОК.
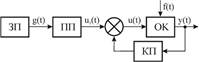
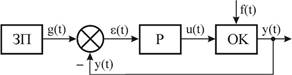
Рисунок 1 – САК із зворотним зв'язком та із
зворотним зв'язком по відхиленню від заданої величини
Якщо вихідна величина
y(t) відхиляється від заданого значення g(t), регулятор коригує сигнал u(t),
щоб усунути різницю ε = g(t) – y(t). Зв’язок між входом і виходом об’єкта
керування називається головним зворотним зв’язком. Задаючий
пристрій формує g(t), а регулятор, поєднуючи підсилювач, керуючий орган і
чутливий елемент, забезпечує y(t) = g(t) за від’ємного зворотного зв’язку.
Такий процес називається регулюванням, а система - системою автоматичного
регулювання (САР).
Принцип
керування за збуренням. Цей підхід базується на компенсації зовнішніх впливів.
Керований параметр залишається стабільним, а керуюча дія змінюється залежно від
основної збурюючої дії, щоб підтримувати незмінність
керованих величин:
1. Система поливу рослин. Датчик вимірює
вологість повітря чи температуру (зовнішнє збурення). Якщо температура зростає,
система автоматично збільшує подачу води, щоб компенсувати випаровування, не
вимірюючи вологість ґрунту (керованого параметра).
2. Обігрівач із компенсацією вітру.
Датчик фіксує силу вітру (збурення), і обігрівач відповідно підвищує
потужність, щоб температура в приміщенні залишалася стабільною.
Принцип
керування за відхиленням. У таких системах вимірюють керований параметр,
порівнюють його із заданим значенням і, у разі відхилення, формують керуючу дію
для його зменшення. Компенсація відхилення відбувається незалежно від причин,
що його спричинили, і цей метод є основним для більшості сучасних систем
автоматичного керування (САК):
1. Термостат у кімнаті. Датчик вимірює
температуру (керований параметр), порівнює її із заданим значенням (наприклад,
22°C). Якщо температура падає, термостат вмикає обігрів, щоб усунути
відхилення.
2. Круїз-контроль автомобіля. Система
вимірює швидкість (керований параметр), і якщо вона знижується через підйом,
двигун отримує команду збільшити потужність.
Комбінований
принцип керування. Поєднання керування за збуренням і за відхиленням
називається комбінованим. У таких САК зворотний зв’язок реалізує керування за
відхиленням, а компенсуючі зв’язки — керування за збуренням:
1. Система клімат-контролю в автомобілі.
Датчик температури в салоні (відхилення) регулює обігрів чи кондиціонер, а
зовнішній датчик температури чи сонячного світла (збурення) додатково коригує
інтенсивність роботи системи для швидшої компенсації.
2. Промисловий котел. Температура води
(відхилення) підтримується зворотним зв’язком, а датчик тиску палива чи
температури навколишнього середовища (збурення) дозволяє заздалегідь
скоригувати подачу палива.
Приклад. Розглянемо як приклад комбіновану
багатоконтурну систему керування рівнем води в проточному баку системи водопідготовки (рис. 2). Метою керування є забезпечення
постійного заданого значення рівня води у баку. Рівень L(t) залежить від
різниці керуючої дії - припливу FВХ(t) і збурюючої
дії стоку FВИХ(t). Умовою досягнення мети керування є забезпечення
рівності FВХ(t) = FВИХ(t).
Поточна величина рівня вимірюється рівнеміром
1 і регулятором 4 порівнюється із заданим значенням. Регулятор, виходячи зі
знаку розузгодження e1, збільшує або зменшує приплив води FВХ(t).
Оскільки приплив залежить не лише від положення затвору регулюючого клапана,
але і від інших параметрів, наприклад від перепаду тиску на клапані, для
підвищення точності регулювання FВХ(t) вимірюється і
використовується при формуванні керуючої дії в контурі місцевого зворотного
зв'язку. x(t) = LЗД(t) – задане значення рівня води в баку; y(t) = LВИМ(t)
– поточне реальне значення рівня води в баку; z(t) = FВХ(t) –
витрати води подачі в бак (приплив); f(t) = FВИХ(t) - витрати води
на виході з баку (стік); e1(t) = DL = LЗД(t) - LВИМ(t) – розузгодження в контурі загального зворотного зв'язку; e2(t) = DF =FВХ. ВИМ.(t) - FВИХ.ВИМ.(t)
- розузгодження в контурі місцевого зворотного
зв'язку
Зміна
стоку FВИХ(t) є збурюючим
впливом. Виміряне значення FВИХ(t) використовується регулятором для
компенсації збурення.
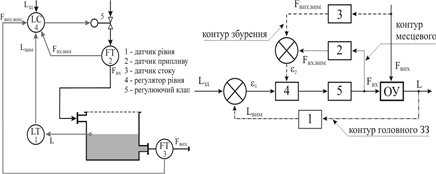
Рисунок 2 - Комбінована багатоконтурна система керування рівня води
в проточному баку системи водопідготовки та
структурна схема комбінованого керування рівня води в проточному баку системи водопідготовки
Завдання
для виконання
Розглянути
ділянку технологічного процесу та побудувати САК за відхиленням або за збуренням або за
комбінованим принципом керування:
1. Автоматичного регулювання температури печі;
2. Автоматичного регулювання температури електроліту в процесі гальванічних
операцій;
3. Автоматичного регулювання вологості в парнику;
4. Автоматичного регулювання температури в пастеризаторі;
5. Автоматичного регулювання температури в овочесховищі;
6. Автоматичного регулювання вологості в тваринницькому приміщені.
![]()
![]()