Тема 15. Закони регулювання
На лекції «Закони регулювання» розглядатимуться основні типи
законів регулювання в системах автоматичного керування: пропорційний (П),
інтегральний (І), диференціальний (Д) та їх комбінації (ПІ, ПД, ПІД). Буде
показано, як ці закони впливають на динамічні характеристики САР, похибку та
стійкість, а також приклади їх застосування в практичних системах.
15.1 Типові закони регулювання
Регулятори класифікують за
різними критеріями:
–
за типом використовуваної енергії – пневматичні, механічні,
гідравлічні, електричні;
– за способом керування – за відхиленням (помилкою), за збуренням,
комбіновані;
– за способом передавання сигналів – неперервні та дискретні;
– за типом зв’язків між елементами – із
сталою або змінною структурою.
Під законом регулювання
розуміють залежність вихідної величини регулятора ![]() від його вхідної величини
від його вхідної величини
![]() за умови, що інерція
самого регулятора не враховується :
за умови, що інерція
самого регулятора не враховується :
![]() .
(15.1)
.
(15.1)
Пропорційний
закон регулювання (П–регулятор). Це найпростіший закон керування. Він
описується залежністю:
![]() .
(15.2)
.
(15.2)
Особливості:
1.
Швидка реакція на зміну похибки;
2.
У сталому режимі залишається статична похибка, яка залежить від Kp: чим більший Kp, тим менша
похибка, але зростає ризик нестійкості.
Переваги: простота реалізації, висока швидкодія.
Недоліки: наявність статичної похибки, можливі
коливання при великому Kp.
Інтегральний закон
регулювання (І–регулятор). Інтегральний регулятор виконує регулювання за
інтегральним законом:
![]() . (15.3)
. (15.3)
Особливості:
1.
Усуває статичну похибку в усталеному режимі (забезпечує астатизм
першого порядку);
2.
Повільна реакція на швидкі зміни похибки, що може призводити до перерегулювання.
Переваги: нульова статична похибка для постійних
збурень.
Недоліки: низька швидкодія, можливе накопичення
інтегральної помилки (інтегральне насичення).
В операторній формі він має
вигляд:
 .
(15.4)
.
(15.4)
Диференціальний закон
регулювання (Д–регулятор). За допомогою Д–регулятора забезпечується подання на
вхід об’єкта величини, пропорційної
швидкості зміни вихідної величини (помилки):
![]() ,
(15.5)
,
(15.5)
або в операторній формі запису:
![]() .
(15.6)
.
(15.6)
Пропорційно–інтегральний
закон регулювання (ПІ–регулятор). Цей закон записується у вигляді:
![]() . (15.7)
. (15.7)
в операторній формі:
![]() . (15.8)
. (15.8)
Особливості:
1.
Пропорційна складова забезпечує швидку реакцію, а інтегральна –
усуває статичну похибку;
2.
Потребує ретельного налаштування Kp і Ki для уникнення перерегулювання.
Переваги: Висока точність і швидкодія,
універсальність.
Недоліки: Складність налаштування, можливі коливання
при неправильно підібраних параметрах.
Пропорційно–диференціальний
закон регулювання (ПД–регулятори). Рівняння даного закону має вигляд:
![]() . (15.9)
. (15.9)
Особливості:
1.
Диференціальна складова передбачає зміну похибки, що підвищує
швидкодію та зменшує перерегулювання;
2.
Не усуває статичну похибку.
Переваги: Покращення динамічних характеристик,
зменшення коливань.
Недоліки: Чутливість до шумів у сигналі похибки,
оскільки диференціювання підсилює високочастотні шуми.
Пропорційно–інтегрально–диференціальний
закон регулювання (ПІД–регулятори). Математичний вираз цього закону має три
складові:
![]() . (15.10)
. (15.10)
Особливості:
1. Поєднує переваги П-,
І- та Д-регуляторів: швидку реакцію, нульову статичну похибку та зменшення перерегулювання;
2. Найпоширеніший закон у
промислових САР.
Переваги: Універсальність, висока точність і стійкість
при правильному налаштуванні.
Недоліки: Складність налаштування трьох параметрів (Kp, Ki, Kd), чутливість до шумів.
15.2. Підвищення точності САР на основі принципу інваріантності
Поняття інваріантності
визначається так: САР є інваріантною відносно збурюючої
дії, якщо після завершення перехідного процесу, зумовленого початковими
умовами, регульована величина і помилка системи не залежать від цієї дії.
Оскільки
![]() , (15.11)
, (15.11)
то система може бути інваріантною за умови
![]() (15.12)
(15.12)
Виконати цю умову можна
різними способами, в зв’язку з чим розрізняють чотири
форми інваріантності. Розглянемо кожну з них.
Перша форма інваріантності.
Умова її виконання: ![]() . Це означає
відсутність дії збурення на об’єкт, і ясно, що ця форма інваріантності практичного знання не має.
. Це означає
відсутність дії збурення на об’єкт, і ясно, що ця форма інваріантності практичного знання не має.
Друга форма забезпечує
інваріантність за рахунок виконання умови:
![]() . (15.13)
. (15.13)
У цьому разі інваріантність
досягається за будь–якого значення (форма) збурення ![]() . Таку інваріантність визначають як абсолютну.
. Таку інваріантність визначають як абсолютну.
Третя форма інваріантності
має назву часткової. Запишемо
![]() ,
(15.14)
,
(15.14)
де ![]() – деякі поліноми.
– деякі поліноми.
Згідно з умовою
інваріантності можна записати
![]() (15.15)
(15.15)
При![]() та
та ![]() виконання умови
інваріантності можливе лише в окремому випадку за певних збурень (відповідних
коренів).
виконання умови
інваріантності можливе лише в окремому випадку за певних збурень (відповідних
коренів).
Четверта форма інваріантності
забезпечується ти, що в систему вводиться додаткова компенсуюча дія, величина
якої ![]() і відповідна передаточна
функція
і відповідна передаточна
функція ![]() мають бути підібрані так,
щоб виконувалася умова:
мають бути підібрані так,
щоб виконувалася умова:
![]() (15.16)
(15.16)
Для виконання цієї умови
передаточна функція компенсаційного каналу повинна мати вигляд:
![]() . (15.17)
. (15.17)
15.3 Використання неодиничних зворотних зв’язків
У найпростішому випадку
(рис.15.1) при одиничному зворотному зв’язку помилку системи за завданням можна записати у вигляді
![]() (15.18)
(15.18)
система працюватиме без помилки за умови ![]() . Для виконання цієї умови в коло зворотного зв’язку слід ввести ланку з
передаточною функцією
. Для виконання цієї умови в коло зворотного зв’язку слід ввести ланку з
передаточною функцією ![]() .Тоді
.Тоді
![]() .
(15.19)
.
(15.19)
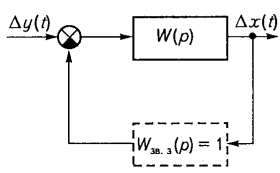
Рисунок 15.1 – Схема зворотього зв’язку
Для виконання умови ![]() треба, щоб
треба, щоб
![]() (15.20)
(15.20)
звідки
![]() . (15.21)
. (15.21)
Оскільки W(p) – передаточна функція розімкнутої системи, то ![]() і коефіцієнт зворотного зв’язку:
і коефіцієнт зворотного зв’язку:
![]() . (15.22)
. (15.22)
Питання для самоперевірки
1. Які існують основні типи
законів регулювання?
2. Що таке пропорційне регулювання
і коли його доцільно використовувати?
3. Чим інтегральне регулювання
відрізняється від диференціального?
4. Який ефект дає комбінування
різних типів регулювання (наприклад, ПІ, ПІД)?
5. Як тип закону регулювання
впливає на якість перехідного процесу в системі?
![]()
![]()