Тема 14. Підвищення якості САР
На лекції «Підвищення якості САР» розглядатимуться основні
показники якості систем автоматичного регулювання, причини зниження якості та
способи її покращення.
14.1 Помилки в САР
Точність системи автоматичного регулювання (САР) є ключовим
показником якості, особливо для електромеханічних систем. Вона характеризується
величиною похибок. Залежно від режиму функціонування системи виділяють два
основних типи помилок: статичні та динамічні.
Статична помилка системи ![]() є відхилення усталеного значення регульованої величини
є відхилення усталеного значення регульованої величини ![]() , яке виникає
після закінчення перехідного процесу
, яке виникає
після закінчення перехідного процесу ![]() від заданого значеннях
від заданого значеннях ![]() , коли всі
параметри системи і збурення є сталими величинами:
, коли всі
параметри системи і збурення є сталими величинами:
![]() .
(14.1)
.
(14.1)
Перехідна динамічна помилка
– це відхилення ![]() дійсного значення регульованої величини від заданого під час
перехідного процесу:
дійсного значення регульованої величини від заданого під час
перехідного процесу:
![]() . (14.2)
. (14.2)
Відхилення регульованої величини від заданого значення після
закінчення перехідного процесу ![]() в процесі слідкування називаються усталеною помилкою в режимі
слідкування ( на рис.14.1
в процесі слідкування називаються усталеною помилкою в режимі
слідкування ( на рис.14.1 ![]() – початкове
розузгодження). Мета замкнених систем автоматичного регулювання (САР), таких як
системи стабілізації, слідкування чи програмного керування, полягає в
забезпеченні такої поведінки регульованої величини x(t), щоб її відхилення від
заданого значення залишалося в межах допустимих технологічних норм. Для цього
параметри та тип регулятора повинні бути відповідним чином узгоджені з
параметрами та динамічними властивостями об’єкта керування.
– початкове
розузгодження). Мета замкнених систем автоматичного регулювання (САР), таких як
системи стабілізації, слідкування чи програмного керування, полягає в
забезпеченні такої поведінки регульованої величини x(t), щоб її відхилення від
заданого значення залишалося в межах допустимих технологічних норм. Для цього
параметри та тип регулятора повинні бути відповідним чином узгоджені з
параметрами та динамічними властивостями об’єкта керування.
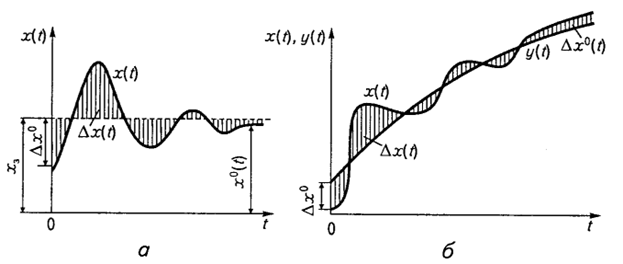
Рисунок 14.1 – Перехідний процес
Основними причинами
виникнення помилок в САР є: вмикання САР
(при появі початкового розугодження); її переналагодження; зміна величини і виду збурення (збурень).
14.2 Типові режими роботи і знаходження помилок САР
За характером зовнішніх
збурень розрізняють такі типові режими роботи САР.
1. Статичний режим – це режим роботи
системи, при якому всі зовнішні впливи на систему та всі її координати
залишаються незмінними, тобто не зазнають змін у часі.
![]() (14.3)
(14.3)
2. Усталений динамічний режим – це режим
роботи системи, при якому зовнішні впливи на неї змінюються відповідно до
певного закону. Такі режими типові для слідкувальних і програмних систем
автоматичного регулювання (САР).
Залежно від природи збурення розрізняють відповідні закони його
зміни:
1)
збурення змінюється зі сталою швидкістю:
![]() або
або ![]() ,
(14.4)
,
(14.4)
де ![]()
![]()
2)
дія на систему змінюється зі сталим прискоренням:
 , (14.5)
, (14.5)
де ![]() ;
;
3)
задаюча дія змінюється за гармонічним законом:
![]() , (14.6)
, (14.6)
де ![]() – амплітудне значення
задаючого сигналу;
– амплітудне значення
задаючого сигналу; ![]() – частота сигналу.
– частота сигналу.
В установленому динамічному
режимі помилка слідкувальної (програмної) системи змінюватиметься з тією самою
частотою, але зі зсувом за фазою ![]() :
:
![]() . (14.7)
. (14.7)
14.3 Основні шляхи підвищення точності керування. Замикання системи
Для підвищення точності систем автоматичного
регулювання (САР) застосовуються такі основні підходи:
1. Застосування
замкнених САР та підвищення коефіцієнта підсилення регулятора (системи).
Замкнуті САР використовують зворотний зв’язок, що дозволяє порівнювати вихідну
величину з заданою та компенсувати відхилення. Збільшення коефіцієнта
підсилення регулятора (K) сприяє зменшенню статичної похибки, оскільки
підсилюється реакція системи на відхилення.
Переваги: простота реалізації, ефективність для
систем із постійними або повільно змінними збуреннями.
Недоліки:
надмірне підвищення коефіцієнта підсилення може призвести до нестійкості
системи, появи автоколивань або перерегулювання.
Приклад: у
системах стабілізації температури підвищення коефіцієнта підсилення
П-регулятора зменшує відхилення від заданої температури, але потребує перевірки
стійкості.
2. Формування відповідних законів регулювання
(впровадження астатизму за похідними). Астатизм регулювання передбачає введення інтегральних або
диференціальних складових у закон керування (наприклад, ПІ-, ПІД-регулятори).
Астатизм першого порядку усуває статичну похибку для постійних збурень, другого
порядку – для лінійно змінюваних, і так далі. Диференціальні складові (за
похідними) дозволяють прогнозувати поведінку системи та швидше реагувати на
зміни.
Переваги:
забезпечує нульову статичну похибку в усталеному режимі, підвищує швидкодію.
Недоліки: cкладність налаштування
параметрів (наприклад, коефіцієнтів ПІД-регулятора), можливе виникнення шуму
при диференціюванні сигналів.
Приклад: у
слідкувальних САР для електродвигунів ПІД-регулятор із диференціальною
складовою дозволяє точно відстежувати задану швидкість обертання.
3. Використання спеціалізованих структур САР,
які реалізують принципи керування для забезпечення високої точності (наприклад,
комбіноване керування, системи зі змінною структурою). Спеціальні структури
САР включають комбіноване керування (поєднання керування за збуренням і за
відхиленням), каскадні системи або системи зі змінною структурою, які
адаптуються до умов роботи. Наприклад, системи зі змінною структурою можуть
перемикатися між різними законами регулювання залежно від стану системи.
Переваги:
гнучкість, здатність адаптуватися до нелінійних об’єктів або змінних умов,
висока точність у складних системах.
Недоліки:
складність проектування та реалізації, потреба в точному моделюванні об’єкта.
Приклад: у
робототехніці комбіноване керування дозволяє одночасно компенсувати зовнішні
збурення (вітер) і відхилення від траєкторії, підвищуючи точність руху.
4. Впровадження принципів інваріантності. Інваріантність
передбачає створення систем, у яких вихідна величина не залежить від певних
збурень (абсолютна інваріантність) або залежить мінімально (часткова
інваріантність). Це досягається шляхом введення компенсаторів збурень або
спеціальних контурів керування.
Переваги:
значне підвищення точності в умовах змінних збурень, стійкість до зовнішніх
впливів.
Недоліки:
реалізація потребує точного вимірювання збурень і складного проектування, що
може бути дорогим і технічно складним.
Приклад: у
системах керування авіадвигунами принципи інваріантності дозволяють
підтримувати стабільну тягу незалежно від змін тиску повітря на різних висотах.
5. Застосування різноманітних коректувальних пристроїв. Коректувальні пристрої
(наприклад, послідовні або паралельні коректори, фільтри) використовуються для
зміни динамічних характеристик системи, щоб покращити її точність і стійкість.
Вони можуть компенсувати запізнення, підсилювати потрібні частоти або послаблювати
шум.
Переваги:
можливість точного налаштування системи без зміни основного регулятора,
відносна простота реалізації.
Недоліки:
ефективність залежить від правильного вибору типу та параметрів коректора,
можливе ускладнення системи.
Приклад: у
системах керування гідравлічними приводами послідовний коректувальний пристрій
може зменшити вплив нелінійностей, підвищуючи точність позиціонування.
Питання для самоперевірки
1. Які основні показники якості систем автоматичного
регулювання?
2. Як впливає введення корегуючих ланок на якість
САР?
3. Яка мета підвищення якості перехідного процесу в
системі?
4. Що таке похибка регулювання і як її можна
зменшити?
5. Які методи використовуються для покращення
динамічних характеристик САР?
![]()
![]()