Тема 11. Структурно-нестійкі системи і корегуючі
ланки
Структурно-нестійкі системи — це системи автоматичного керування,
які не забезпечують стійкість через особливості їхньої структури, такі як
розташування полюсів на правій півплощині комплексної площини. Для виправлення
цієї ситуації використовують коригуючі ланки — елементи, що додаються до
системи для зміни її частотних характеристик і поліпшення стійкості. Це
дозволяє переміщати полюси або нулі в потрібну область комплексної площини,
перетворюючи систему на стабільну та ефективну.
11.1. Структурно-нестійкі системи і корегуючі
ланки.
У всіх розглянутих раніше випадках стійкість системи залежала
від значення параметрів ланок структурної схеми існуючої системи. САК, в якій
стійкість залежить лише від значення параметрів ланок, називають
структурно-стійкими. Але є такі САК, в яких досягти стійкості за рахунок зміни
параметрів ланок принципово неможливо. Стійкість
цих систем може бути досягнута при зміні структурної схеми. САК, в яких стійкість не може бути досягнута за рахунок лише зміни
параметрів, називають структурно-нестійкими.
Для пояснення розглянемо окремий приклад. Нехай в САК є дві
інтегруючі ланки і одна аперіодична ланка першого порядку (рис.11.1):
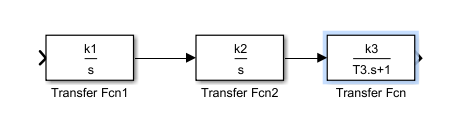
Рисунок 11.1 –
Структурна схема розімкнутої САР
Отримаємо характеристичне рівняння замкнутої системи і дослідимо
стійкість системи, структурна схема зображена на рисунку 11.2:
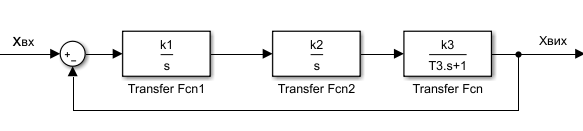
Рисунок 11.2 – Структурна
схема САР
Запишемо передаточні функції ланок
системи:
![]() ;
;![]() ;
; ![]() (11.1)
(11.1)
і характеристичне рівняння
замкнутої системи з підстановкою передаточних функцій набуде наступного
вигляду:
![]() (11.2)
(11.2)
Провівши спрощення отримаємо
вираз:
![]() ,
,
![]() — коефіцієнт підсилення розімкнутої системи.
— коефіцієнт підсилення розімкнутої системи.
Якщо розглянути характеристичне рівняння третього прядку в
загальному вигляді
![]() , (11.3)
, (11.3)
то ![]() ;
; ![]() ;
; ![]() ;
;
При цьому, член вигляду ![]() . Оскільки
. Оскільки ![]() порушується перша умова
Гурвіца (всі коефіцієнти мають бути додатними), тому система є нестійкою.
порушується перша умова
Гурвіца (всі коефіцієнти мають бути додатними), тому система є нестійкою.
Структурна нестійкість у системах автоматичного керування (САК)
є важливою характеристикою, яку слід враховувати при проектуванні і аналізі
таких систем. Як зазначено, зовнішньою
ознакою структурної нестійкості є відсутність деяких коефіцієнтів у
характеристичному рівнянні, що вказує на дефіцит важливих компонентів для
забезпечення стабільної роботи системи.
Причини структурної нестійкості:
1. Наявність
інтегруючих ланок: Системи, що містять дві або більше інтегруючі ланки
(наприклад, ланки з інтеграцією або диференціюванням), схильні до структурної
нестійкості, оскільки вони можуть не мати достатньої кількості коефіцієнтів для
забезпечення стабільності. Такі системи зазвичай демонструють повільну або
безмежно зростаючу відповідь на збурення, що може призвести до небажаної
динаміки, такої як коливання або дивергенція.
2. Комбінація
з аперіодичними ланками: Ланки, що не містять інерційних властивостей,
тобто аперіодичні або безінерційні ланки, часто
використовуються в системах з інтегруючими ланками. Однак їх комбінація може
призвести до структурної нестійкості,
оскільки відсутність деяких членів у характеристичному рівнянні не дозволяє коректно збалансувати динамічні властивості системи.
Шляхи забезпечення стійкості:
1. Введення
коригуючих ланок: Для усунення структурної нестійкості необхідно змінити
структуру системи. Один з основних способів — це додавання коригуючих ланок. Це можуть бути
ланки, які додаються паралельно або послідовно в систему для стабілізації її
поведінки.
– паралельні коригуючі ланки допомагають
компенсувати зміни в системі без зміни основної структури. Вони можуть бути
використані для корекції швидкості або точності системи;
– послідовні коригуючі ланки можуть бути
використані для збільшення інерційності системи, що може допомогти зменшити або
відстрочити можливі ефекти нестійкості.
2. Заміна
елементів системи: Якщо система містить занадто багато інтегруючих
ланок, можна спробувати замінити їх на більш стабільні компоненти або змінити
їх характеристики так, щоб система залишалася стійкою.
3. Використання
стабілізуючих механізмів: В деяких випадках може бути корисним
впровадження стабілізуючих механізмів, таких як фільтри або відгуки, які
зменшують швидкість змін у системі і таким чином знижують ризик нестійкості.
11.2. Паралельні корегуючі ланки.
Паралельні корегуючі ланки — це
спеціальні елементи, які під'єднуються до основної
системи паралельно, з метою покращення динамічних чи статичних характеристик
системи автоматичного керування (САК). Вони називаються
"паралельними", тому що формують додатковий вплив на керуючий сигнал
або на зворотний зв’язок, не змінюючи основну структуру системи.
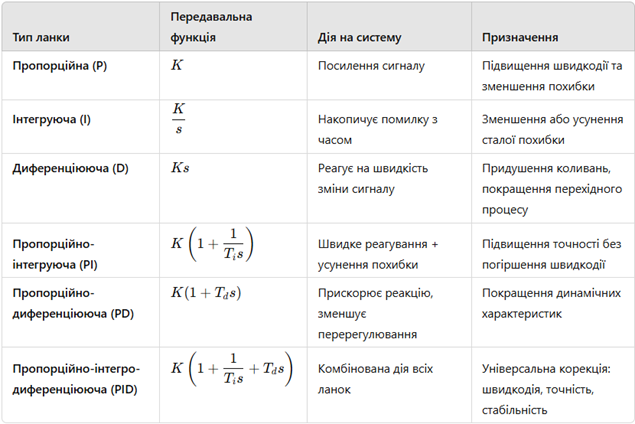
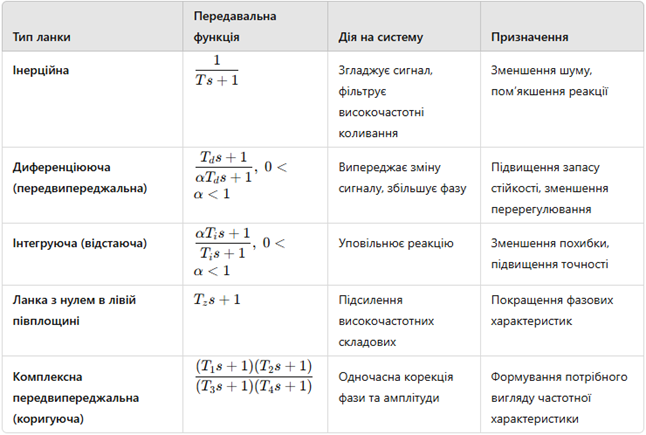
Види паралельних корегуючих ланок
подані в таблиці 11.1:
Таблиця 11.1 – Види ланок
Як паралельні корегуючі ланки
використовуються місцеві жорсткі від'ємні
зворотні зв’язки (рис.11.1).
Охопимо одну із інтегруючих ланок жорстким від'ємним зворотнім
зв’язком і складемо рівняння (передаточну функцію) даної ланки з врахуванням
введеного зворотного зв’язку.
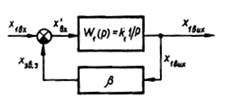
Рисунок 11.1 – Інтегруюча ланка з жорстким від'ємним
зворотнім зв’язком
Рівняння ланки до введення зворотного зв’язку має вигляд
![]() (11.4)
(11.4)
Рівняння ланки з урахуванням зворотного зв’язку матиме вигляд
![]() , або
, або ![]() (11.5)
(11.5)
Позначивши:
![]() ;
; ![]() ; після ділення
всіх членів на
; після ділення
всіх членів на ![]() дістанемо рівняння
інтегруючої ланки охопленої від'ємним зворотним зв’язком:
дістанемо рівняння
інтегруючої ланки охопленої від'ємним зворотним зв’язком:
![]() (11.6)
(11.6)
З цього виразу видно, що інтегруюча ланка охоплена від’ємним
зворотним зв’язком, еквівалентна стійкій аперіодичній ланці першого порядку.
Зміну вигляду часової характеристики в цьому разі ілюструє графік на рисунку
11.2:
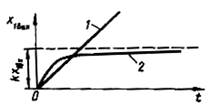
Рисунок 11.2 – Часова характеристика
Передаточна функція інтегруючої ланки, охопленої зворотним
зв’язком, матиме вигляд
![]() (11.7)
(11.7)
Характеристичне рівняння замкнутої системи в цьому випадку:
![]() (11.8)
(11.8)
![]()
![]() ;
; ![]() ;
;![]() ;
; ![]() — всі
коефіцієнти більше нуля, тому скорегована система є структурно-стійкою.
— всі
коефіцієнти більше нуля, тому скорегована система є структурно-стійкою.
11.3. Послідовні корегуючі ланки
Послідовні корегуючи ланки називають ланку, за допомогою якої на
вхід наступної ланки подається величина, пропорційна швидкості зміни вихідної
величини попередньої ланки.
Види послідовних корегуючих ланок
подані в таблиці 11.2:
Структурна схема при введенні корегуючої
ланки матиме вигляд (рис.11.3):
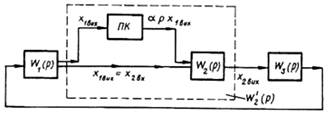
Рисунок 11.3 – Структурна схема з корегуючою ланкою
Розглянемо як зміниться передаточна функція інтегруючої
ланки ![]() з врахуванням підключення
на її вході послідовної корегуючої ланки ПК.
з врахуванням підключення
на її вході послідовної корегуючої ланки ПК.
Рівняння ![]() у даному випадку матиме
вигляд
у даному випадку матиме
вигляд
![]() . (11.9)
. (11.9)
Тут ![]() , тому передаточну функцію ланки
, тому передаточну функцію ланки
![]() після введення корегуючої ланки можна записати у вигляді:
після введення корегуючої ланки можна записати у вигляді:
![]() (11.10)
(11.10)
Характеристичне рівняння замкнутої САР з врахуванням ланки ПК
має вигляд:
![]() =0
=0
або
![]()
Видно, що дана система завдяки введенню послідовної корегуючої ланки перетворилась у структурно-стійку систему.
Питання для
самоперевірки
1.
Що таке структурна нестійкість в
системах автоматичного керування? Як її можна виявити через характеристичне
рівняння?
2.
Які системи автоматичного керування
зазвичай є структурно-нестійкими, і чому вони вимагають корегуючих
ланок?
3.
Як впливає на стійкість системи
наявність двох або більше інтегруючих ланок у поєднанні з іншими ланками
(наприклад, аперіодичними або безінерційними)?
4.
Що таке корегуючі
ланки і які типи корегуючих ланок зазвичай
використовуються для досягнення стійкості в системах?
5.
Як зміна структури системи, наприклад,
введення корегуючих ланок, допомагає вирішити
проблему структурної нестійкості? Наведіть приклад.
![]()
![]()