Тема 9. Стійкість
неперервних лінійних систем автоматичного керування
Стійкість неперервних лінійних систем автоматичного керування
(САК) визначає здатність системи повертатися до рівноважного стану після
збурень. Вона аналізується за допомогою характеристичного рівняння,
розташування його коренів у комплексній площині та критеріїв стійкості, таких
як Рауса—Гурвіца, Найквіста,
Ляпунова.
9.1. Поняття стійкості
САК
Стійкість системи автоматичного керування (САК) є важливим
критерієм її здатності функціонувати в заданих межах. Вона визначає, наскільки
система здатна відновлювати своє стабільне положення після зовнішніх впливів
або збурень.
З математичної точки зору стійкість системи можна оцінити за
допомогою аналізу її динамічних характеристик. Система вважається стійкою, якщо
після припинення впливу збурення її вихідні сигнали повертаються до початкового
значення або залишаються в певних межах, не зростаючи неконтрольовано.
Нестійкість системи може призвести до таких негативних
наслідків, як:
1. Руйнація системи або
її компонентів через надмірне навантаження.
2. Некоректна або
несподівана поведінка, що порушує виконання поставлених завдань.
Таким чином, стійкість є необхідною умовою для успішної роботи
автоматичних систем керування. Тому на етапі проєктування
системи стійкість обов'язково перевіряється, щоб упевнитися в надійності та
правильності її роботи за різних умов.
Розглянемо типи стійкості, що подані в таблиці 9.1
Таблиця 9.1 – Типи стійкості
|
№ |
Тип |
Що це означає? |
Як поводиться система? |
Приклад |
|
1 |
Стійка
система |
Після збурення система заспокоюється і повертається до норми |
Коливання зменшуються або вихід стає постійним |
Маятник, який повертається назад після поштовху |
|
2 |
Умовно
стійка |
Система не змінюється, якщо не заважати |
Може коливатись постійно, але не “вибухає” |
Ідеальний маятник без тертя |
|
3 |
Нестійка
система |
Після збурення система все більше відхиляється, не зупиняється |
Коливання зростають, система “втікає” з рівноваги |
Олівець, поставлений вертикально на вістря |
Розглянемо графічні характеристики станів системи, що подані в
таблиці 9.2
Таблиця 9.2 – Графічне відображення стійкості та нестійкості
системи
|
Стан системи |
Характеристика |
|
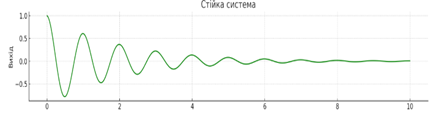
Стійка система – коливання зменшуються і
затухають. |
|
|
У такій системі, коли вона зазнає коливань (наприклад, після
зміни початкових умов або при збуреннях), амплітуда коливань зменшується з
часом і врешті-решт гасне. Тобто система здатна повернутися до стабільного
стану після збурення. Причини: Це відбувається через наявність негативних
зворотних зв'язків у системі, які зменшують енергію
коливань або швидкість руху. Це може бути спричинено наявністю фрикційних
сил, демпфування або втрат енергії в процесі руху. Приклад: Механізм амортизації автомобіля, де
коливання підвіски після проїзду нерівності зменшуються і припиняються. |
|
|
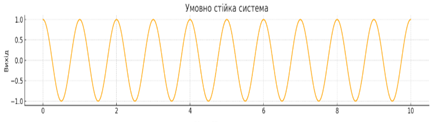
Умовно стійка система – коливання не затухають, але
й не зростають. |
|
|
У такій системі коливання не зменшуються і не зростають. Це
означає, що після збурення амплітуда коливань залишається сталою з часом
(постійна величина). В результаті система не гасне, але й не
"вибухає". Причини: Відсутність достатнього демпфування або
надлишкових зворотних зв'язків, щоб зменшити або
збільшити коливання. Іноді такі системи перебувають на межі стійкості, де
навіть мале збурення може призвести до нестійкості. Приклад: Резонансні коливання в механічних або
електричних системах, де коливання можуть зберігатися, якщо частота збудження
дорівнює частоті власних коливань системи. |
|
|
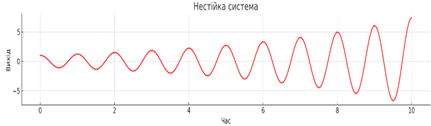
Нестійка система – коливання стають дедалі
більшими, система "вибухає". |
|
|
У нестійких системах коливання з часом збільшуються, а не
зменшуються. Це означає, що система втрачає свою здатність повертатися до
стабільного стану, і з часом відхилення від рівноваги стають все більшими.
Цей тип нестійкості може призвести до того, що система "вибухає",
тобто коливання можуть досягти дуже великих значень. Причини: Наявність позитивних зворотних зв'язків, які посилюють коливання, або недостатнє
демпфування, яке не дозволяє системі стабілізуватися. Це може призвести до
катастрофічних наслідків, як-от розриви чи поломки. Приклад: В системах автоматичного керування, якщо
контролер неправильно налаштований, може виникнути переналаштування,
яке призведе до дедалі більших коливань, що спричиняють неконтрольовану
поведінку системи. |
Поняття стійкості поділяють на такі категорії: стійкість в
цілому, в малому та в великому залежно від того, як система реагує на зміни або
збурення в різних умовах.
1. Стійка система в цілому: це стійкість системи в повному,
глобальному сенсі, коли після будь-яких збурень чи порушень система може
повернутися до свого початкового або рівноважного стану. Така система не буде
«вибухати» чи мати нескінченні коливання в результаті зовнішнього впливу.
Наприклад, стабільність літака або автономного робота, де вся
система здатна компенсувати або коригувати свої відхилення від рівноваги.
Стійкість в цілому означає, що система, незважаючи на локальні зміни, здатна
досягти стабільного стану на великому рівні.
2. Стійка система в малому: це стійкість системи до невеликих
збурень або відхилень від рівноваги. У таких випадках система може бути стійкою
лише при невеликих або малих змінах у її параметрах або умовах, але вона може
бути нестійкою при більших порушеннях.
Наприклад, система з малим рівнем демпфування, яка здатна
компенсувати незначні коливання, але може втратити стійкість при великих
збуреннях. Це можна порівняти з фізичним маятником: якщо відхилення незначні,
маятник повернеться до вертикального стану, але великі зміни можуть призвести
до нестійкості.
3. Стійка система в великому: це стійкість системи до великих
або сильних збурень, де навіть значні зміни не призводять до втрати
стабільності. Система повинна бути здатною адаптуватися або відновлюватися
навіть після великих зовнішніх впливів.
Наприклад, великий корабель, який може витримати потужні хвилі
та збурення без серйозних наслідків для його стабільності. Стійкість в великому
вказує на здатність системи підтримувати рівновагу навіть після значних збурень
або порушень.
9.2. Аналіз стійкості за коренями характеристичного рівняння
замкнутої системи
Аналіз стійкості за коренями характеристичного рівняння є
ключовим методом для визначення стабільності системи автоматичного керування.
Цей підхід ґрунтується на дослідженні полюсів передавальної функції системи,
оскільки корені характеристичного рівняння відповідають цим полюсам.
Для оцінки стійкості системи можна скористатися наступними
правилами, що базуються на положенні коренів у комплексній площині:
1. Стійка система: Всі корені характеристичного рівняння
мають негативні дійсні частини. Це означає, що всі полюси передавальної функції
повинні бути розташовані в лівій півплощині комплексної площини (для дискретних
систем — всередині одиничного кола на комплексній площині).
2. Умовно стійка система: Якщо корені мають нульові дійсні
частини, вони повинні бути простими (множина кратності рівна 1). Така система
демонструє сталу амплітуду коливань, що не зменшується і не зростає, що може
бути корисним для спеціальних застосувань.
3. Нестійка система: Якщо хоча б один корінь має позитивну
дійсну частину, система є нестійкою. Це означає, що з часом коливання будуть
збільшуватися, що призведе до неконтрольованої поведінки системи.
Таким чином, аналіз коренів характеристичного рівняння дозволяє
з'ясувати, чи система буде стабільною, чи схильною до нестійкості, що є
критично важливим при розробці та налаштуванні систем автоматичного керування.
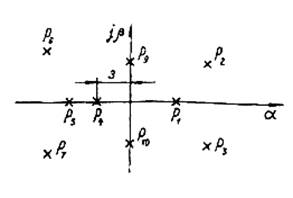
Рисунок
9.1 – Комплексна площина коренів
Аналіз коренів характеристичного рівняння та їхній рух в
комплексній площині є важливим інструментом для забезпечення стабільності
системи автоматичного керування. Коли параметри системи змінюються, може
відбутися перехід коренів з лівої напівплощини (де
вони відповідають стабільним режимам) у праву напівплощину
(де система стає нестійкою). Це зумовлює зміну знака
дійсних частин коренів, що є критичним для стійкості.
Межа стійкості — це уявна вертикальна вісь у комплексній площині коренів, яка
відокремлює стабільні корені (що знаходяться в лівій півплощині) від нестійких
(що знаходяться в правій півплощині). Якщо система наближається до цієї межі,
то її стійкість стає чутливою до змін параметрів.
Запас стійкості визначається як відстань від уявної осі до найменшого кореня,
що знаходиться в лівій півплощині (за умови, що немає коренів на самій уявній
осі або в правій півплощині). Запас стійкості дозволяє оцінити, наскільки
система є стабільною перед можливими змінами параметрів, які можуть призвести
до її нестійкості.
Особливим випадком є наявність нульового кореня або пари чисто уявних коренів (якщо вони мають
кратність 1), що вказує на знаходження системи на межі стійкості. У таких
випадках система не має тенденції до зростання або спадання коливань, але
будь-яка зміна параметрів може призвести до нестабільності.
Аналіз коренів характеристичного рівняння є необхідним кроком у проєктуванні систем автоматичного керування для того, щоб
гарантувати їхню стабільність у всіх операційних режимах.
9.3. Критерій Рауса—Гурвіца
Критерій Рауса—Гурвіца — це потужний
інструмент для визначення стійкості системи автоматичного керування (САК) без
необхідності безпосередньо знаходити корені характеристичного рівняння. Він
дозволяє швидко оцінити, чи всі корені характеристичного рівняння знаходяться в
лівій півплощині комплексної площини, що є необхідною умовою стабільності
системи.
Щоб застосувати критерій Рауса—Гурвіца,
потрібно записати характеристичне рівняння замкнутої системи у вигляді:
![]() (9.1)
(9.1)
«Згідно з цим критерієм, умови стійкості формулюються
таким чином: всі корені характеристичного рівняння матимуть від'ємні дійсні
частини (або будуть дійсними від'ємними), якщо при додатному знаку всіх
коефіцієнтів будуть додатними головний визначник Гурвіца і його діагональні мінори» [4]. «Алгоритм знаходження визначника Гурвіца наступний:
1. По головній
діагоналі записують коефіцієнти характеристичного рівняння від ![]() до
до ![]() .
.
2. Місця зверху від
діагоналі заповнюють коефіцієнтами з більшим індексом, а знизу від діагоналі —
з меншим індексом.
3. При відсутності
відповідного коефіцієнта ставлять нуль.
4. Діагональні мінори визначають
із головного детермінанта Гурвіца викреслюванням
відповідних стовпчиків і рядків» [5].
Цей критерій широко застосовується в теорії автоматичного
керування завдяки своїй простоті та ефективності при аналізі характеристичних
рівнянь низького та середнього порядку.
Питання для самоперевірки
1. Що таке стійкість системи автоматичного керування і як її можна визначити
за допомогою коренів характеристичного рівняння?
2. Яка різниця між стійкою, умовно стійкою та нестійкою системою з точки
зору положення коренів характеристичного рівняння в комплексній площині?
3. Як критерій Рауса—Гурвіца використовується для
оцінки стійкості системи, не знаходячи корені характеристичного рівняння?
4. Що таке структурна нестійкість системи і як вона пов'язана з наявністю
інтегруючих ланок у її структурі?
![]()
![]()