Тема 6. Об’ємні та
гіроскопічні датчики
Схемні
і компонувальні рішення об’ємних датчиків
можуть мати найрізноманітніші рішення, одне з яких представлено на рис. 5.1.
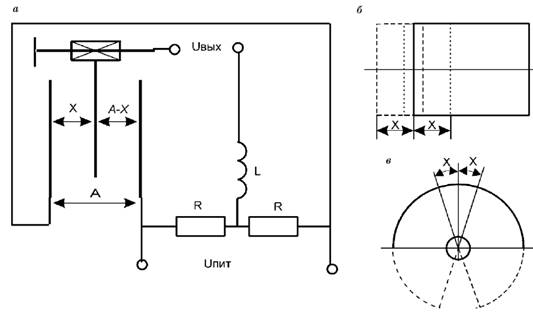
Рис.
5.1 Об’ємні датчики: а) приклад схеми застосування і включення; б)
лінійний датчик; в) датчик обертання
Властивості
об’ємних датчиків: велика потужність і рівень напруги вихідного
сигналу, незалежність від температури і радіації.
Параметри
вибору типових об’ємних датчиків: діапазон вимірювання, мм, рад; основна похибка відносна, %;
діапазон робочих температур, С; додаткова температурна похибка нуля і шкали, %
/ С; стрічка пропускання, Гц; мінімальна і максимальна довжина датчика в
робочому положенні, мм; вага рухомої частини датчика, кг; ОТП.
Недоліки
об’ємних датчиків: нелінійність, малі діапазони вимірювань, споживання
змінного струму, залежність від паразитних ємностей монтажу, великі розміри
чутливих елементів, необхідність в індуктивному реакторі.
Виходом
датчика є амплітудно-модульований сигнал, який необхідно детектувати і через АЦП
вводити в процесор.
Датчики нахилу, на відміну від датчиків кутового положення, вимірюють
відхилення в системі координат, пов'язаної із землею, а точніше, з
гравітаційним полем землі. До таких датчиків належать насамперед гіроскопічні
датчики і рідинні інклінометри.
Гіроскопічний датчик кутових переміщень використовує властивість гіроскопа з
трьома ступенями свободи зберігати незмінним положення осі власного обертання в
просторі. Гіроскоп визначає кути відхилення в системі координат, пов'язаної з
гравітаційним полем.
У
техніці вимірювання переміщень і швидкостей переміщень застосовуються такі типи
гіроскопічних датчиків: електромеханічні, оптичні (лазерні), волокнисті
оптичні, хвильові твердотільні, квантові, п'єзокерамічні (п'єзоелектричні): у
формі тригранної призми, біморфний.
Електромеханічний
гіроскоп – це прилад,
основним елементом якого є швидко обертається ротор, закріплений так, що вісь
його обертання може повертатися. Три ступені свободи (осі можливого обертання)
ротора гіроскопа забезпечуються двома рамками карданова підвісу (карданного
підвісу, кардана). Якщо на такий пристрій не діють зовнішні збурення, то вісь
власного обертання ротора зберігає постійний напрям в просторі. Якщо ж на нього
діє момент зовнішньої сили, що прагне повернути вісь власного обертання, то
вона починає обертатися не навколо напрямки моменту, а навколо осі,
перпендикулярної йому (ефект прецесії). У добре збалансованому (астатичному
нестійкий) і досить швидко обертається гіроскопі, встановленому на довершених
підшипниках з незначним тертям, момент зовнішніх сил практично відсутня, так що
гіроскоп довго зберігає майже незмінною свою орієнтацію в просторі. Тому він
може вказувати кут повороту підстави. Якщо ж поворот осі гіроскопа обмежити
пружиною, то при відповідній установці його, скажімо, на рухомій платформі, яка
виконує розворот, гіроскоп буде деформувати пружину, поки не врівноважиться
момент зовнішньої сили.
Параметри вибору електромеханічних гіроскопів: кількість вимірюваних
змінних; похибка вимірювання, радий; час готовності, хв; крутизна статичної
характеристики, мВ/град; тип вихідного сигналу (аналоговий, цифровий); вихідна
напруга, В; вихідний опір, Ом; рід струму живлення (змінний з числом фаз і
частотою, постійний); напруга, В; ресурс, год; ОТП.
Відцентрові датчики використовують вимір відцентрової сили як функції кутової
швидкості обертання тіла. Чутливим елементом зазвичай служить підпружинене
тіло, що переміщається в радіальному каналі обертового ланки. Величина його
переміщення є функцією кутової швидкості. Джерела похибок – втрати на тертя, нестабільність і нелінійність пружних
елементів, роздільна здатність вимірників переміщення. Істотний недолік -
складність виведення інформаційного сигналу в нерухому частину пристрою,
відносно висока похибка вимірювання. Спосіб перетворення вихідного сигналу
пов'язаний зі способом виміру відцентрової сили. Якщо застосовуються
динамометри на властивостях закону Гука, то тип вихідного сигналу пов'язаний зі
способом вимірювання положення підпружиненого тіла, якщо відцентрова сила
вимірюється тензомостом, то введення сигналу реалізується АЦП.
Гіроскопічні
датчики в режимі вимірювання швидкості можуть виявитися ефективним засобом
вимірювання швидкості. Кваліфікація і принцип дії гіроскопів були розглянуті
раніше.
Акселерометр
– пристрій для
вимірювання прискорення, що виникає при русі об'єктів. Акселерометр визначає
прискорення в системі координат гравітаційного поля.
Класифікація акселерометрів.
1.
За типом руху (поступальний, обертальний).
2.
За принципом дії (механічний, механоелектричний, п'єзоелектричний,
молекулярно-електронний).
3.
За способом вимірювання (безперервний, пороговий).
4.
За кількістю осей (компонентів) знімання інформації (одно-, дво-, трьохкоординатні
(компонентні)).
5.
По виду вихідного сигналу (аналоговий, цифровий).
6.
За діапазону вимірювань (низькочастотні, середньочастотні, високочастотні).
7.
За кількістю додаткових функцій (вимірювання кута відхилення від вертикалі,
вимірювання статичного прискорення (гравітації), вимірювання кутової швидкості
обертання, вимір частоти вібрацій і сили ударів).
8.
За виконанням (монокорпусні, одноплатні, багатокорпусні).
В
електромеханічному акселерометрі маятникового або пружинного типу рухлива маса
m, у тому числі і що є невід'ємним елементом конструкції, відхиляється від
положення рівноваги, створеного силою ваги або пружиною. Це відхилення
вимірюється датчиком переміщення деякої точки, жорстко пов'язаної з масою, на
величину X, і вводиться в систему управління рухом. Перетворювачем переміщення
може бути будь датчик переміщень, розглянутий вище.
У
п'єзоелектричному акселерометрі вихідна електрична напруга виникає при
механічному стискуванні п'езоелемента під дією сил інерції. При цьому роль
пружного стрижня або пружини грають самі п'єзоелементи з високими показниками
пружності і механічної міцності, наприклад п'езокерамічні пластини.
П'єзоелектричні
акселерометри призначені для вимірювання параметрів вібрації в широких
діапазонах частот, амплітуд, температур. У молекулярно-електронних
акселерометрах відбувається перетворення механічних коливань в електричний
сигнал на основі електрокінетичного ефекту. Акселерометр являє собою заповнений
робочою рідиною корпус, усередині якого розташовані пориста перетворююча
діафрагма з струмознімачами – електродами і пружний елемент – сильфон з укріпленою на ньому інерційної масою. При впливі
на акселерометр механічних коливань відбувається стиснення або розтягнення
сильфона, а через перетворюючу діафрагму відбувається витікання робочої рідини,
що приводить до появи на електродах заряду, пропорційного прискоренню.
У
мікромеханічних датчиках рухома механічна частина приводиться в високочастотні
коливання за допомогою електростатичного приводу гребенчатого виду. Управління
електростатичним приводом здійснюється генератором, що працює в автоматичному
режимі. Для знімання інформації у вигляді напружень, пропорційних проекція
абсолютної кутовий швидкості і лінійного прискорення, використовується ємнісний
датчик, утворений елементами конструкції рухомої і нерухомої механічної
частини. Управління, знімання і попередня обробка корисного сигналу будь-якого
мікромеханічного датчика виробляються за допомогою інтегральних схем.
Сучасний
ринок комплектуючих пропонує великий вибір типових акселерометрів: одно- і
багатофункціональних, одно- і багатокомпонентних, різних розмірів, форми і
способів монтажу.

