Тема
5. Імпульсні цифрові датчики
Імпульсні (інкрементальні) цифрові
датчики відображають вимірюється становище
кількістю імпульсів, які потім підраховуються з урахуванням напрямку
переміщення. Датчики цього типу мало схильні дестабілізуючим чинникам навколишнього
середовища, мають велику довговічність, дуже високу точність, але й відносно
високу вартість. Їх застосування виправдовується там, де потрібні точність і
надійність.
Імпульсні
датчики переміщень формують на свій вихід послідовності імпульсів напруги
електричного струму, параметри яких (сума імпульсів, фазовий зсув, частота) або
їх комбінація дозволяють оцінити спостережувані змінні. Імпульси формуються за
рахунок модуляції потоків енергії - світловий, електромагнітної і т. п. – і перетворення сигналів приймачів цієї енергії в електричні
імпульси.
Імпульсні
датчики, як правило, мають відносну шкалу відліку, і при запуску приводу з
таким датчиком застосовують алгоритми базування за сигналами датчиків кінцевих
положень або референтним шкалами.
Імпульсні
датчики використовуються у вигляді типових комплектуючих блоків (енкодери,
лінійні датчики) або вбудовуються поетапно в конструкцію мехатронного пристрої.
Приклади компонувальних рішень типових імпульсних датчиків і способів їх
кріплення наведено на рис. 5.1.
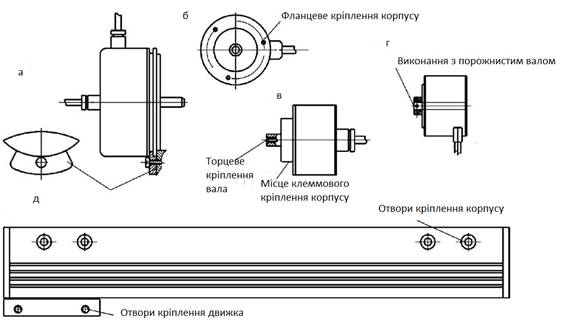
Рис.
5.1. Типові імпульсні датчики: а, б, в, г) перетворювач
кутового переміщення; д) перетворювач лінійного переміщення
Лазерні датчики лінійних переміщень – це відносно новий клас перетворювачів, що вважається досить
перспективним. Лазерні датчики будуються за принципом вимірювання зсуву фаз
випромінюваного сигналу лазерного променя і сигналу лазерного променя,
відбитого від мішені, відстань до якої вимірюється. Лазерні датчики лінійних і
кутових переміщень будуються також за принципом запису на рухому щодо зчитувача
шкалу цифрового коду так, як це робиться, наприклад, на CD дисках.
Параметри
вибору лазерних датчиків: спосіб вимірювання переміщень, діапазон вимірюваних
переміщень, ціна розподілу шкали, тип вихідного сигналу (аналоговий або цифровий),
тип коду для цифрового сигналу (паралельний або послідовний), тип інтерфейсу,
рівень вихідних сигналів, гранична швидкість зсуву, напруга живлення ,
споживана потужність, спосіб кріплення датчика, ОТП.
Введення
даних в контролер від лазерних датчиків переміщення здійснюється, як правило,
через послідовні або паралельні порти.
Індуктивні датчики переміщень в якості активного елементу використовують
змінну індуктивність або взаємну індуктивність. Якщо рухомим елементом є
феромагнітний сердечник, то його переміщення проявляється у зміні коефіцієнта
самоіндукції котушки (змінна індуктивність) або в зміні коефіцієнта зв'язку між
первинною і вторинною обмотками трансформатора (диференційний трансформатор),
що призводить до зміни вторинної напруги.
У
трансформаторі зі змінною зв'язком одна обмотка може обертатися щодо іншої.
Первинна обмотка утворює індуктор, а вторинна обмотка з наведеним струмом дає
напругу у функції кута обертання. Індуктивні датчики підключаються в ланцюг,
живиться джерелом синусоїдальної напруги з частотою декількох кГц, і можуть
вимірювати безпосередньо лінійне або кутове переміщення. Індуктивні датчики, з
одного боку, чутливі до зовнішніх електромагнітних полів, а з іншого – здатні самі їх індукувати. Тому їх необхідно екранувати.
Гідності
індуктивних датчиків: слабка залежність від атмосферних умов, придатність до
використання в умовах надзвичайно агресивного середовища; значний час
напрацювання на відмову; хороша точність і лінійність.
Недоліки
індуктивних датчиків: відносно висока вартість як перетворювача, так і каналу
введення даних; складність точної обробки знімаються сигналів; потреба
харчування стабільним синусоїдальною напругою.
Індуктивні
датчики переміщень випускаються серійно у вигляді готових елементів, які
залежно від конструкції і способу перетворення вхідного сигналу називаються
сельсини, синус- косинусними трансформаторами, індуктосинами, респансинами,
резольвер.
Параметри
вибору типових індуктивних датчиків переміщення: напруга живлення, частота
живлячої напруги, число фаз живлячої напруги, діапазон виміру, максимальна
допустима похибка, роздільна здатність, лінійність, вхідний опір по всіх
входів, вихідний опір, спосіб кріплення корпусу і вхідного вала, ОТП.
Зважаючи
відносної простоти технології виготовлення індуктивних датчиків іноді стає
технічно і економічно обґрунтованим застосування нетипових вбудованих датчиків
(рис. 5.2).
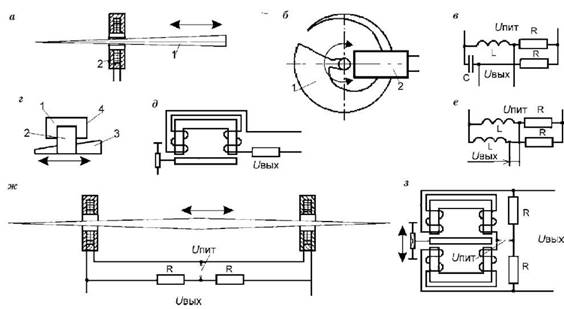
Рис.
5.2. Схеми переміщень індуктивних датчиків: а) датчик лінійних переміщень
плунжерного типу: 1 –
вхідний елемент (сердечник перемінного перерізу), 2 – котушка;
б) датчик кутових переміщень плунжерного типу: 1 – вхідний елемент, 2 – котушка; в) мостова
схема виділення сигналу з реактивною ємкістю; г) датчик лінійних переміщень
щілинного типу: 1
– обмотка, 2 –
сердечник зі щілиною, 3
– вхідний елемент (рухома вставка), 4
– кришка обмотки; д) датчик лінійних переміщень з
плоско-паралельним зазором; е) мостова схема виділення сигналу з реактивною
індуктивністю; ж) диференціальний двохактний датчик з роздільними котушками; з)
диференціальний двохактний датчик з роздільними магнітопроводами
Датчики переміщень на магніторезисторах. Принцип дії магніторезисторах заснований на зміні
електричного опору під впливом магнітного поля. Це дозволяє будувати на їх базі
датчики обертання і лінійного переміщення, безконтактні потенціометри збільшень
і абсолютних величин (рис. 5.3). Особливістю магніторезисторах є те, що
перетворювач можна помістити на
великій відстані від рухомого об'єкту з
джерелом магнітного поля. Крім того, такі датчики володіють високою швидкодією.
а б в
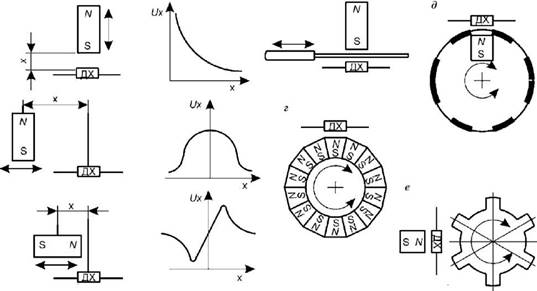
Рис.
5.3. Схеми застосування
елементів Холла в датчиках переміщення: а) схеми розміщення збудника щодо ДХ;
б) характеристики перетворювачів; в-е) конструктивні схеми датчиків
Магніторезисторах
використовують як частину бруківки резистивной схеми. Напруга холостого ходу
моста визначається виразом Uм
= К0UВ, де К0
– чутливість моста;
U – напруга живлення моста; В
– індукція в
чутливій зоні.
Магніторезисторах
найчастіше випускаються у вигляді мікросхем мостів, деякі з них мають ще й
підсилювач вихідного сигналу.
Ємнісні
датчики кутових і лінійних переміщень. Ємнісні датчики являють собою плоский
або циліндричний конденсатор, одна з обкладок якого відчуває вимірюється
переміщення, викликаючи зміну ємності. Вони чудові своєю простотою, що дозволяє
створювати міцні і надійні конструкції.
Діелектриком
зазвичай служить повітря, так що параметри конденсатора залежать тільки від
геометричних характеристик і не залежать від властивостей використовуваних
матеріалів. Якщо матеріали правильно підібрані, то можна зробити дуже незначним
вплив температури на зміни площі поверхні і відстані між обкладинками. З іншого
боку, необхідно захищати датчик від тих факторів навколишнього середовища, які
можуть погіршити ізоляцію між обкладинками: від пилу, вологості, корозії,
іонізуючої радіації.
Для
живлення ємнісних датчиків переміщень використовується змінне біполярний
напруга високої частоти. Чим вище частота, тим менше розміри чутливого елемента
– конденсатора зі
змінними параметрами.
Ємнісні
датчики переміщень випускаються у вигляді типових комплектуючих або вбудовують
в МУ, об'єднуючи деталі датчика і елементи МУ.
В
даний час випускаються типові ємнісні датчики малих лінійних переміщень, що
охоплюють діапазон вимірювань від десятків мікрон до десятків міліметрів.
Конструктивно лінійні датчики являють собою циліндричний конденсатор з однією з
обкладок, який переміщується уздовж осі, виготовлений як циліндр з ходовим
поршнем (рис. 5.4).
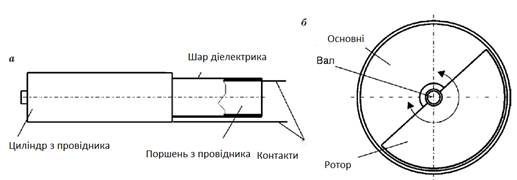
Рис.
5.4. Конструкції типових ємнісних датчиків: а) лінійного; б) кутового
Датчики
кута виготовляють у вигляді пелюсток, що перекривають один одного при обертанні.

