Лабораторна робота №2. Функціональні модулі систем
пневмоавтоматики
Мета роботи:
Вивчення складу, принципу роботи та правил побудови функціональних модулів.
Отримання навичок створення пневмосхем за допомогою
функціональних модулів.
Як було розглянуто раніше
(див. Лаб. Роботу №1), пневматичні схеми складаються
з безлічі різних пристроїв. Однак окремо розглядати кожен агрегат можливо лише
в невеликих схемах (що складаються з 1–2 виконавчих пристроїв). Як же бути,
коли система складається з 10–15, а може і більше виконавчих пристроїв? У цьому
випадку зручно розбити всю схему на окремі системні модулі, що виконують кожен
свою певну функцію (рис. 2.1).

Рис. 2.1. Схема
функціонального модуля на базі виконавчого пристрою
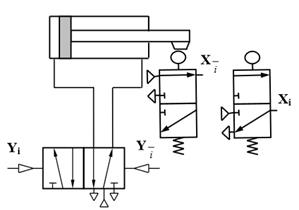
Більш докладно склад і
створення функціонального модуля розглянемо на прикладі (рис. 2.2). У ролі
виконавчого пристрою в даному випадку виступає пневматичний циліндр
двосторонньої дії, керований пневматичним 5/2 розподільним клапаном. Підводимо
до клапана стиснене повітря. Вихідні канали з'єднуємо з порожнинами циліндра
таким чином, щоб при відсутності керуючих команд виконавче пристрій знаходився
в своєму початковому положенні (в даному прикладі шток циліндра висунутий або
втягнутий).
Керуючий сигнал, який
забезпечує виконання основної операції, позначаємо Yi (і – порядковий номер функціонального
модуля в схемі), а протилежний сигнал (у нашому прикладі повернення штока в
початковий стан) – Y![]() . Забезпечуємо виконавчий пристрій i засобами контролю
відпрацювання заданих команд – датчиками контролю положення штока. Лінію від
датчика, контролюючого початкове положення позначаємо як X
. Забезпечуємо виконавчий пристрій i засобами контролю
відпрацювання заданих команд – датчиками контролю положення штока. Лінію від
датчика, контролюючого початкове положення позначаємо як X ![]() , і відповідно лінію від датчика кінцевого положення i штока
– Хi.
, і відповідно лінію від датчика кінцевого положення i штока
– Хi.
Функціональні модулі
відрізняються між собою як виконавчим пристроєм, так і завданнями, які вони
виконують у складі пневматичних систем. Наприклад, виконавчим пристроєм у
складі системного модуля на рис. 2.2 є пневмоцилиндр
поступального руху. Він може застосовуватися для подачі деталей на конвеєр, для
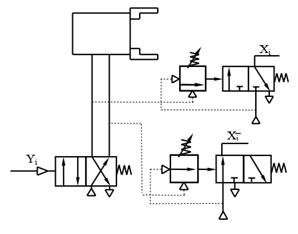
вивантаження готових виробів і т.д. Для операцій
захоплення деталей можна використовувати пневмозахват
(рис. 2.3). При цьому для контролю зусилля можна використовувати реле тиску.
|
|
|
|
Рис. 2.2. Функціональний
модуль з пневмоциліндром в якості виконавчого
пристрою |
Рис. 2.3. Функціональний
модуль для виконання операції «Захват» |
В якості самостійного
функціонального модуля можуть також виступати пневматичні розподільні клапани.
Приклад побудови схеми
функціонального модуля: Побудова функціонального модуля з використанням логічних елементів «І» та
«АБО». Виконавче пристрій – циліндр двосторонньої дії, керуючий пристрій – 5/2
– розподільник з двостороннім пневматичним управлінням, 3/2 розподільники з
ручним керуванням, індикація: пневмоцилиндр
двосторонньої дії і пневмолампочкі.
Основний циліндр 1, керований
за допомогою кнопок 5, виконує функцію відкриття і закриття люка. Дії пневмоцилиндра контролюються двома датчиками кінцевого
положення 4, а також сигнальними лампочками 2. Додатковий циліндр 3 служить для
установки огорожі з метою безпеки. Огорожа у випадку, коли люк відкритий можна
прибрати тільки при натисканні на кнопку 6.
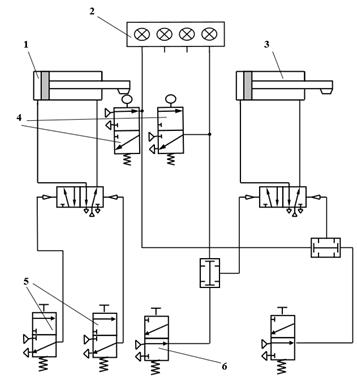
Рис. 2.4. Приклад
схеми функціонального модуля
Контрольні питання
1. Які пристрої можуть входити
до складу функціонального модуля? Наведіть приклади модулів.
2. Скільки системних модулів у
складі пневматичної схеми на рис. 1.20 (див. Лабораторну роботу №1)?
3. Скласти системний модуль,
до складу якого входить пневматичний моностабільний
розподільний клапан, циліндр з поворотною пружиною, дії якого контролюються
датчиками положення.
4. Скласти функціональний
модуль, що виконує операцію завантаження деталей на конвеєр.
5. Скласти пневматичну схему,
що складається з 2-х функціональних модулів. Нанести необхідну маркування
пристроїв.
Завдання до лабораторної роботи №2
Завдання №1. Побудова функціонального модуля з
використанням пневматичного циліндра з бістабільний
управлінням.
Виконувана функція (операція
транспортування на робочу позицію): переміщення вихідної ланки з вихідної
позиції в кінцеву позицію і повернення у вихідну позицію. Виконавче пристрій - пневмоцилиндр двосторонньої дії; керуючий пристрій - 5/2
розподільний клапан з двостороннім пневматичним управлінням. Сигнали керуючих
команд для всіх завдань подаються в ручному режимі за допомогою розподільників
з механічним (ручним) управлінням (сигнал «Переміщення» Yвкл
= Хкн1, сигнал «Повернення» Yвикл = Хкн2). Індикація
відпрацювання команд проводиться за допомогою пневматичних лампочок.
Завдання №2. Побудова функціонального модуля з
використанням клапана тиску при дії пневматичного циліндра.
Виконувана функція: контроль
зусилля захоплення деталі маніпулятором. Виконавче пристрій – пневмоцилиндр двосторонньої дії; керуючий пристрій – 5/2 розподільний
клапан з бістабільний пневматичним управлінням і 5/2
розподільний клапан з моностабільний управлінням, 3/2
розподільні клапани з ручним управлінням; індикація - пневматичні лампочки.
Завдання №3. Побудова функціонального модуля з
використанням пневмоцилиндра односторонньої дії.
Виконувана функція:
виштовхування деталі в лоток з робочого столу і швидке відведення штока.
Виконавче пристрій – пневмоцилиндр однобічної дії з
поворотною пружиною; керуючі пристрої: 3/2 розподільний клапан з двостороннім
пневматичним управлінням, 3/2 розподільні клапани з ручним управлінням;
індикація – пневмолампочкі.
Завдання №4. Побудова функціонального модуля з
використанням бістабільний розподільного клапана.
Виконувана функція:
використання клапана як елемент пам'яті. Виконавче пристрій – 5/2 розподільний
клапан з бістабільний пневматичним управлінням;
керуючі пристрої – 3/2 розподільні клапани з ручним управлінням; індикація - пневмолампочкі.
Завдання №5. Побудова функціонального модуля з
використанням моностабільний розподільного клапана.
Виконувана функція:
запам'ятовування сигналу при короткочасній його подачі і утримання стабільного
становища при відсутності тиску в пристроях управління. Виконавче пристрій –
5/2 розподільний клапан з моностабільний пневматичним
управлінням і ланцюжком самопідхоплення; Керуючий
пристрій – 3/2 розподільні клапани з ручним управлінням; індикація – пневмолампочкі.
Завдання №6. Побудова функціонального модуля з
використанням реле тиску.
Виконувана функція: контроль
рівня тиску, недостатнього для виконання операції. Виконавче пристрій –
нормально відкрите реле тиску; керуючі пристрої – 3/2 розподільні клапани з
двостороннім пневматичним управлінням, 3/2 розподільні клапани з ручним
управлінням; індикація - пневмолампочкі.
Завдання №7. Побудова функціонального модуля з
використанням реле тиску.
Виконувана функція: контроль
рівня тиску, достатнього для виконання операції. Виконавче пристрій – нормально
закрите реле тиску; керуючі пристрої – 3/2 розподільні клапани з двостороннім
пневматичним управлінням, 3/2 розподільні клапани з ручним управлінням;
індикація – пневмолампочкі.
Завдання №8. Побудова функціонального модуля з
використанням реле часу.
Виконувана функція: затримка
відключення сигналу на заданий проміжок часу. Виконавче пристрій – нормально
відкрите реле витримки часу; керуючі пристрої – 3/2 розподільні клапани з
двостороннім пневматичним управлінням, 3/2 розподільні клапани з ручним
управлінням; індикація - пневмолампочкі.
Завдання №9. Побудова функціонального модуля з
використанням реле часу.
Виконувана функція: затримка
надходження сигналу на заданий проміжок часу. Виконавче пристрій – нормально
закрите реле витримки часу; керуючі пристрої – 3/2 розподільні клапани з
двостороннім пневматичним управлінням, 3/2 розподільні клапани з ручним
управлінням; індикація – пневмолампочкі.
Завдання №10. Побудова функціонального модуля з
використанням логічних елементів «І» та «АБО».
Виконувана функція: подача
керуючої команди при виконанні заданого логічного умови. Виконавче пристрій –
циліндр двосторонньої дії; керуючі пристрої – 5/2 розподільний клапан з
двостороннім пневматичним управлінням, логічні елементи, 3/2 розподільні
клапани з ручним управлінням; індикація: пневмоцилиндр
двосторонньої дії і пневмолампочки.
Оформлення кожної задачі оформляється на окремому листі, на якому
наводиться умова задачі, пневматична схема функціонального модуля з індексами
елементів, 3/2 розподільники з ручним керуванням для завдання сигналів команд і
пневмолампочки для індикації відпрацювання сигналів
команд.

