Лабораторна
робота №1. Дискретні
системи і засоби пневмоавтоматики
Мета роботи: Знайомство
з основними типами пневматичних пристроїв, що застосовуються при побудові схем
пневмоавтоматики. Вивчення умовних позначень, правил підключення елементів і їх
маркування.
Пневматичними називаються
пристрої, що працюють за допомогою енергії стисненого повітря. Досліджувані
пневматичні пристрої призначені для управління тиском і витратою повітря, а
також використання енергії стисненого повітря для виконання заданих дій
технологічних операцій.
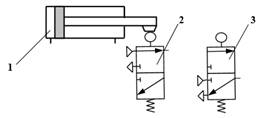
В залежності від варіанту
використання та призначення всі пристрої, що входять до складу тієї чи іншої
пневматичної схеми (наприклад, рис. 1.1) поділяються на такі основні рівні:
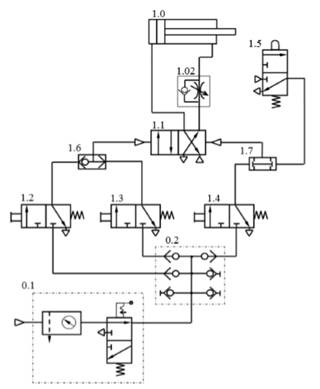
Рис. 1.1.
Приклад пневматичної схеми системи дискретної дії
1) енергетичний;
2) логіко-обчислювальний;
3) виконавчий;
4) інформаційний.
Енергетичний
рівень являє собою
систему забезпечення стисненим повітрям всіх інших рівнів системи (рис. 1.2).
На цьому рівні відбувається регулювання тиску, кондиціювання повітря (видалення
вологи, розпорошення масла, фільтрація, охолодження), загальне підключення
системи до пневматичної мережі, накопичення стислого повітря в ресивері та ін.
Через цей рівень підводиться потік енергії, який потім забезпечить виконання корисної
роботи пристроями виконавчого рівня, роботу інформаційного рівня й керування
системою.
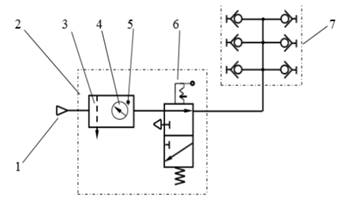
Рис. 1.2. Умовне
позначення системи забезпечення стисненим повітрям:
1 – підведення повітря
(магістраль або компресор); 2 – блок підготовки стисненого повітря; 3 – фільтр;
4 – редукційний клапан; 5 – маслорозпилювач;
6 – замикаючий клапан; 7 – коллектор
Логіко-обчислювальний рівень
забезпечує узгодженість дій усіх виконавчих пристроїв системи. На цьому рівні,
за допомогою елементів логіки, аналізуються сигнали стану різних пристроїв
системи і на підставі цього аналізу формуються сигнали керуючих команд для
виконавчих пристроїв.
До елементів логіки
відносяться:
1. Клапан логічного «І»,
виконує функцію логічного множення двох сигналів. Робота клапана здійснюється
за допомогою золотника. Якщо на вхід клапана подається тільки один сигнал Х1
або Х2 (рис. 1.3),
то золотник зміщується в одну або в іншу сторону, тим самим, перекриваючи
подачу повітря, і на виході елемента сигнал відсутній. Якщо ж будуть подані
обидва сигналу, то золотник займе нейтральне або крайнє положення і на виході
елемента з'явиться керуючий сигнал.
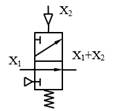
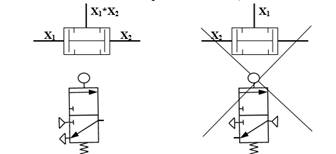
Слід зазначити, що функцію
множення можна реалізувати також за допомогою моностабільний трилінійного
двохпозиційного клапана (рис. 1.4).
З малюнка видно, що сигнал на виході з'явиться тільки при наявності одночасно
сигналів Х1 і Х2.

|
Рис. 1.3. Умовне позначення клапана
логічного «І» |
Рис. 1.4. Виконання функції множення
за допомогою нормально закритого моностабільний клапана |
Рис. 1.5.
Умовне позначення клапана логічного «АБО» |
2. Клапан логічного
«АБО», виконує функцію логічного додавання двох сигналів. Сигнал на виході
такого клапана з'явиться при подачі або сигналу X1, або сигналу Х2
(рис. 1.5).
Як і у випадку з функцією
множення функцію додавання можна забезпечити також за допомогою моностабільний
клапана (рис. 1.6). Різниця полягає лише у виконанні цього клапана. Для
реалізації функції складання необхідний нормально відкритий клапан.
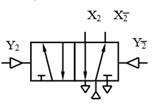
3. Елементи пам'яті.
Такі елементи використовуються в системі для запам'ятовування сигналів. Іншими
словами, для контролю наявності сигналу від виконавчого пристрою. Роль
елементів пам'яті зазвичай виконують пневматичні бістабільні двохпозиційні
розподільники (рис. 1.7).
Вони управляються
сигналами відповідних команд (Yn), а результатом дії буде сигнал стану елемента
пам'яті (Хn).
|
|
|
|
|
Рис. 1.6. Виконання функції
складання за допомогою нормально відкритого моностабільний клапана |
Рис. 1.7. Умовне позначення елемента
пам'яті на базі пневматичного розподільника |
Рис. 1.8. Виконання функції інверсії
за допомогою моностабільний клапана |

4. Логічне заперечення
(функція інверсії). При складанні різного типу пневматичних схем виникає
задача, коли необхідне отримання інверсії того чи іншого сигналу. Це означає,
що при подачі сигналу на вхід елемента, на виході сигнал дорівнює нулю і
навпаки, при відсутності сигналу на вході ми отримаємо сигнал на виході. В
якості елемента, що реалізує функцію «НЕ», можна використовувати нормально
відкритий моностабільний клапан (рис. 1.8).
До виконавчого рівня
відносяться пристрої практично будь-якого типу. Вони забезпечують перетворення
підводиться до модуля енергії в корисну роботу по команді від
логіко-обчислювального рівня. Основними елементами рівня є виконавчі пристрої –
виконують задану операцію технологічного процесу: циліндри, мотори з елементами
управління (рис. 1.9). У конкретній системі до цього рівня можуть ставитися
керуючі пристрої (розподільні клапани) і елементи, що погоджують керуючий
сигнал по виду і рівню параметрів (рідина, повітря, електричний сигнал, тиск,
напруга та ін.).

а) б) в)
Рис. 1.9. Приклади
виконавчих пристроїв: а – пневмоцилиндр однобічної дії з поворотною пружиною; б
– пневмоцилиндр двосторонньої дії; в – пневматична поворотний пристрій
Якщо виконавчі пристрої працюють в декількох режимах або припускають
настройку експлуатаційних параметрів, то апарати налаштування цих параметрів і
перемикання режимів також відносяться до виконавчого рівня.
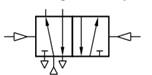
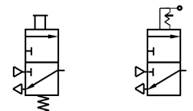
Розподільні клапани можуть
бути бістабільний або моностабільний (рис. 1.10).
Відмінною особливістю бістабільних розподільних клапанів є збереження
останнього положення навіть при відсутності керуючого сигналу. У зв'язку з цим відсутність або
повторення попереднього сигналу не змінить стану клапана до тих пір, поки не
буде подано сигнал зворотного команди.
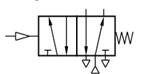
Управління моностабільний
клапаном здійснюється за допомогою тільки одного керуючого сигналу, як для
прямої команди, так і для зворотного. При зникненні поданого сигналу, клапан
під дією пружини займе своє початкове положення. Тому діючий сигнал необхідно
зберігати до тих пір, поки не буде подана зворотна команда.
Інформаційний
рівень, як правило,
містить датчики і засоби контролю поточного стану виконавчого рівня. Вхідні в
нього пристрої налаштовуються на параметри, що підтверджують завершення
операції технологічного процесу пристроєм виконавчого рівня. Наприклад, задане
зусилля притиску, позиціонування робочого органу в необхідному положенні та ін.
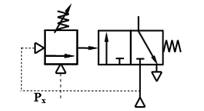
До цього рівня
відносяться:
– реле тиску (рис. 1.11), що використовуються для
контролю тиску в системі або в порожнинах циліндра. Робота системи в цьому
випадку буде продовжена тільки при досягненні певного рівня тиску Рх, на яке
налаштований датчик. Після цього датчик подасть необхідний сигнал для
продовження роботи.
|
а) |
б) |
|
|
Рис.
1.10. Розподільні клапани: а) бістабільний; б) моностабільний |
Рис.
1.11. Схема нормально закритого реле тиску |
|
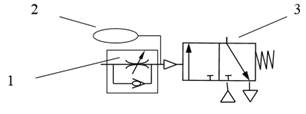
– реле часу (рис. 1.12), що використовуються у
випадку, коли необхідно затримати виконання тієї чи іншої команди, або сигналу
стану. Принцип роботи заснований на
налаштуванні дроселя 1 на необхідну величину. При цьому час наповнення камери 2
повітрям буде різна. Як тільки камера наповниться до тиску настройки пружини,
розподільний клапан 3 переключиться.
|
|
|
|
Рис. 1.12. Нормально
закрите реле часу: 1 – регульований дросель; 2 – повітряна камера; 3 – 3/2
розподільний клапан |
Рис. 1.13. Приклад застосування
датчиків контролю положення: 1 – виконавчий пристрій; 2, 3 – датчики контролю
положення |
– датчики контролю положення (кінцеві вимикачі). За
допомогою таких датчиків можна контролювати, наприклад, крайні положення поршня
циліндра (рис. 1.13). Як правило, для датчиків положення використовуються
розподільні клапани з роликом або штовхачем.
– пневматична кнопка. Призначена для пуску в роботу всієї
системи або окремих, що входять в загальну схему, блоків. Кнопка являє собою, як правило, пневматичний
моностабільний 3/2 або 4/5 клапан з ручним керуванням (рис. 1.14). Кнопки
можуть бути з фіксатором (рис. 1.14.б), наприклад, для багаторазового
відпрацювання системою заданого циклу, або без фіксатора (рис. 1.14.а), для
одиничного циклу.
|
а) б) |
|
|
|
Рис. 1.14. Умовне позначення
пневматичної кнопки: а – без фіксатора; б – з фіксатором |
Рис. 1.15. Схематичне позначення
пневмолампочок |
Рис. 1.16. Маркування 5/2
розподільного клапана |
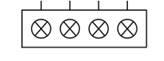

– пневматична лампочка. Може бути використана як індикатор
виконання (невиконання) тієї чи команди. Наприклад, при досягненні штоком
циліндра свого крайнього положення лампочка «загориться» зеленим кольором (рис.
1.15).
Маркування та правила
підключення пристроїв При
роботі з пневматичними пристроями часто виникають труднощі, пов'язані з
неправильним підключенням харчування, керуючих і вихідних сигналів. Щоб цього
уникнути, багато фірм наносять на апаратуру умовне позначення елемента разом з
маркуванням кожного входу (виходу) (рис. 1.16). Так як лабораторні роботи з
предмету «Дискретні системи управління» виконуються на базі пневматичного
обладнання німецької фірми FESTO, розглянемо докладніше маркування цих
пристроїв.
1 (Р) – до цього каналу
підключається живлення від компресора або магістральної лінії
2 (А) і 4 (В) –
розподільчі лінії, підводяться безпосередньо до виконавчого пристрою
(порожнинам пневмоцилиндра, до пневмоповротніку, до пневмозахвату і т.д.).
3 (Т) і 5 (Т) – лінії
вихлопу стисненого повітря в атмосферу.
11 (Y) і 12 (Z) – керуючі
канали, сюди підводяться сигнали управління даними пневморозподільника.
Для полегшення завдання,
запобігання появи багатьох помилок і просто економії часу пропонуємо
систематизований підхід до послідовності підключення пристроїв при побудові
пневмосхем. Підкреслимо, що таке рішення не є єдиним виключає правилом
підключення елементів системи, а просто наводиться як один з прикладів
численних варіантів збірки схем.
Збірка схеми виконується в
4 кроки.
1. Підключення живлення (1
або Р) до всіх елементів, використаним для побудови схеми і вимагають для
нормальної роботи додаткове підведення стисненого повітря (рис. 1.17).
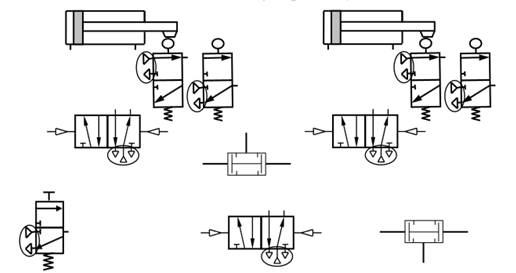
Рис. 1.17. Елементи схеми,
що вимагають підключення живлення
2. Якщо в пневматичною схемою виконавчими пристроями є циліндри, мотори та
інші пристрої, то другим кроком після підключення живлення буде підключення
всіх виконавчих пристроїв системи до відповідних розподільним клапанам (рис.
1.18), а також підключення інших пристроїв виконавчого рівня (дроселі, клапани
швидкого скидання, редукційні клапани).
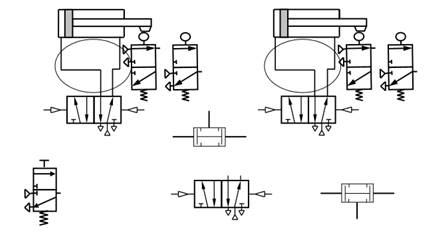
Рис. 1.18.
Підключення виконавчих пристроїв
3. Побудова схем для
команд управління, що відповідають за послідовність роботи пристроїв в системі
(на базі логічних рівнянь для кожного функціонального модуля) (рис. 1.19).
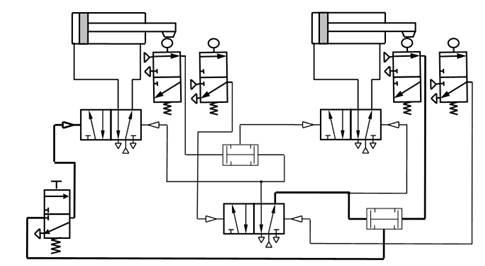
Рис. 1.19. Підведення
сигналу команди до пристрою (виділений)
4. Підключення до інформаційних пристроїв (наприклад, до датчиків контролю
положення) індикаторних пневмолампочек і засобів контролю роботи циліндрів,
переклад пристроїв у вихідне положення, перевірка правильності підключення
датчиків контролю, перевірка послідовності виконання логічних команд, настройка
параметрів пристроїв (реле тиску, реле часу, дроселі та ін.).
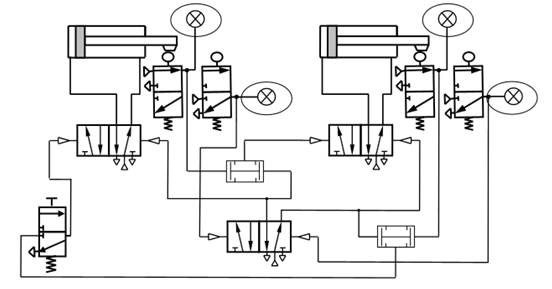
Рис. 1.20.
Підключення пристрою індикації обробки
команд
На що слід звернути
увагу.
1. При підводі
харчування до елементів логіки стежити, щоб до виходу були підключені вхідні
керуючі сигнали (рис. 1.21). Теж саме стосується датчиків контролю положення,
клапанів.
а)
б)
Рис. 1.21.
Підключення живлення до апаратів: а – правильне підключення; б – неправильне
2. Чи не підводити
харчування в керуючі входи розподільних клапанів. У цьому випадку розподільний
клапан спрацює один єдиний раз.
3. Якщо розподільний
клапан моностабільний, необхідно врахувати, що керуючий сигнал повинен бути
присутнім до тих пір, поки він потрібен. Інакше, як тільки сигнал пропаде, під
дією пружини клапан пересунеться в початкове положення і цикл роботи
порушиться.
4. Не забувати, що в
будь-якій системі має бути присутня кнопка «Пуск». Сигнал від кнопки є
співмножником в рівнянні команд пристрою, який спрацьовує першим згідно Вашої
циклограмме.
5. Перш ніж перевіряти
працездатність зібраної схеми, переконайтеся, що всі канали пристроїв
підключені.
Контрольні
питання
1. Назвіть основні рівні
розподілу пристроїв, що входять до складу пневмосхеми (рис.1.1). Наведіть
приклади пристроїв кожного рівня.
2. Чим відрізняється
бістабільний розподільний клапан від моностабільний? Наведіть приклади таких
пристроїв на рис.1.1.
3. Чи можна в якості
елемента пам'яті використовувати моностабільний розподільний клапан? Відповідь
обґрунтуйте.
4. Чи правильно підключені
пристрої в схемі (див. Рис. 1.22)?
5. Яку функцію виконує
реле часу? Намалюйте умовне позначення реле часу.
6. За допомогою
моностабільний клапанів складіть схему для рівняння:
Y1
= (Х1 + Х2 * Х3) * НЕХ4
7. Нанесіть маркування для
всіх елементів пневмосхеми (див. Рис. 1.22).
8. Виправити схему на рис.
1.22 і зібрати її на стенді.
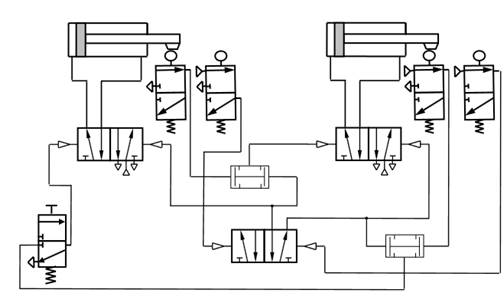
Рис. 1.22
Приклад пневматичної схеми для пошуку помилок

