ТЕМА 3. СИМПЛЕКС-МЕТОД
3.1.
Основна ідея симплекс-методу.
Алгоритм симплекс-методу
Розглянутий п. 2.4 графічний спосіб є застосовуваним до дуже вузького класу
задач лінійного програмування: ефективно ним можна розв’язувати задачі, що
містять не більш двох змінних. Одним з універсальних методів є симплексний
(симплекс-метод), називаний також методом послідовного поліпшення плану.
Нехай задача записана в
канонічній формі:
![]() (3.1)
(3.1)
![]() (3.2)
(3.2)
![]() (3.3)
(3.3)
В п 2.3
встановлено, що якщо задача (3.1) – (3.3) має рішення, то її оптимальний план
збігається принаймні з одним з опорних рішень (планів) системи рівнянь (3.2).
Саме цей опорний план і відшукується симплекс-методом у результаті упорядкованого
перебору опорних планів. Стосовно задачі (3.1) – (3.3) упорядкованість
розуміється в тім змісті, що при переході від одного опорного плану до другого
відповідні їм значення цільової функції (3.1) зростають (не спадають). Тому
симплекс-метод називають методом послідовного поліпшення плану. Оскільки
загальне число опорних планів не перевищує ![]() , то через кінцеве число кроків або буде знайдений
оптимальний опорний план, або встановлена нерозв’язність задачі.
, то через кінцеве число кроків або буде знайдений
оптимальний опорний план, або встановлена нерозв’язність задачі.
Рішення
задачі (3.1) – (3.3) складається з двох етапів: на першому знаходять
який-небудь початковий опорний план ![]() , на другому – за спеціальними правилами переходять від
початкового плану
, на другому – за спеціальними правилами переходять від
початкового плану ![]() до іншого, більш близького до
оптимального, опорного плану
до іншого, більш близького до
оптимального, опорного плану ![]() , потім до наступного
, потім до наступного ![]() і так доти, поки
задача не буде розв’язана.
і так доти, поки
задача не буде розв’язана.
З
геометричної точки зору перебір опорних планів можна тлумачити, як перехід
по ребрах з однієї вершини багатогранника планів в іншу в напрямку до вершини ![]() , в якій цільова функція досягає максимального
значення (рис. 3.1).
, в якій цільова функція досягає максимального
значення (рис. 3.1).
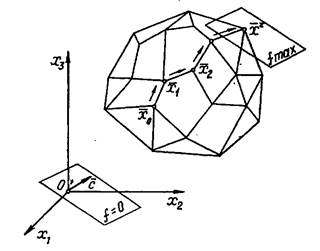
Рис.
3.1
1.
Знаходження початкового опорного плану. У прикладах 1.8–1.10 ми
докладно розглянули, як знаходяться опорні рішення системи лінійних рівнянь,
так що перший етап рішення задачі (3.1) – (3.3) нам, по суті, є знайомий.
Таблиця 3.1
|
|
1 |
–х1 |
. . . |
–хп |
|
0= |
а10 |
а11 |
. . . |
а1n |
|
. . . |
. . . |
. . . . . . . . . . . . . . |
||
|
0= |
ат0 |
ат1 |
. . . |
атn |
|
f= |
0 |
–с1 |
. . . |
–сп |
Для компактності й однаковості обчислювальної процедури тут до початкової
жорданової таблиці приписують рядок для цільової функції (табл. 3.1). В
результаті після приведення системи обмежувальних рівнянь до одиничного базису
цільова функція, як і базисні змінні, виявиться вираженою через вільні змінні.
Такий прийом ми уже використовували при рішенні приклада 2.7 (табл. 2.10–2.13).
Отже,
для відшукання початкового опорного плану задачі (3.1) – (3.3) можна
запропонувати наступний алгоритм:
1)
записати задачу у формі жорданової таблиці так, щоб всі елементи стовпця
вільних членів були невід’ємними, тобто виконувалася нерівність ai0 ≥0
(![]() ). Ті рівняння системи
(3.2), в яких вільні члени від’ємні, попередньо помножуються на (–1). Табл. 3.1
називають симплексною;
). Ті рівняння системи
(3.2), в яких вільні члени від’ємні, попередньо помножуються на (–1). Табл. 3.1
називають симплексною;
2)
табл. 3.1 перетворювати кроками жорданових виключень, заміщаючи нулі в лівому
стовпці відповідними х. При цьому на кожнім кроці розв’язуючим може бути
обраний будь-який стовпець, що містить хоча б один додатній елемент. Рядок
цільової функції на вибір розв’язуючих стовпців на даному етапі ніякого впливу
не робить. Розв’язуючий рядок, визначається за найменшим з відношень вільних
членів до відповідних додатніх елементів розв’язуючого стовпця, (такі
відношення будемо називати симплексними).
У ході
жорданових виключень стовпці під “перекиненими” на верх таблиці нулями
(розв’язуючі стовпці) можна викреслювати. Підлягають викреслюванню і рядки, що
складаються з одних нулів.
Якщо в процесі
виключень зустрінеться 0-рядок, всі елементи якої нулі, а вільний член
відмінний від нуля, то система обмежувальних рівнянь рішень не має.
Якщо ж
зустрінеться 0-рядок, у якій, крім вільного члена, інших додатніх елементів
немає, то система обмежувальних рівнянь не має невід’ємних рішень.
Таблиця 3.2
|
|
1 |
–хr+1 |
. . . |
–xn |
|
x1= |
b10 |
b11 |
. . . |
b1, n–r |
|
. . . |
. . . |
. . . . . . . . . . . . . . . |
||
|
xr= |
br0 |
br1 |
. . . |
br, n–r |
|
f= |
b00 |
b01 |
. . . |
b0, n–r |
Якщо система обмежувальних
рівнянь сумісна, то через деяке число кроків всі нулі в лівому стовпці будуть
заміщені х і тим самим буде отриманий деякий базис, а отже, і опорний
план, що відповідає йому, (табл. 3.2) (див. 1.3). Щоб виписати з таблиці
компоненти опорного плану, потрібно покласти рівними нулю вільні змінні, тоді
базисні змінні будуть рівні відповідним вільним членам: x1=b10,
..., xr=br0, xr+1=0,
... , хп=0 чи ![]() =(b10, ... , br0,
0, ... , 0). Відповідне опорному плану
=(b10, ... , br0,
0, ... , 0). Відповідне опорному плану ![]() значення функції f
дорівнює вільному члену b00, тобто f(
значення функції f
дорівнює вільному члену b00, тобто f(![]() )=b00.
)=b00.
В пункті 1
алгоритму передбачається, що всі елементи стовпця вільних членів невід’ємні. Ця
вимога не обов'язкова, але якщо вона виконана, то всі наступні жорданові
виключення відбуваються тільки з додатніми розв’язувальним елементами, а це
зручно при обчисленнях.
У
випадку, коли в стовпці вільних членів є від’ємні числа, вибір розв’язуючого
елемента, роблять у такий спосіб:
1)
переглядають рядок, що відповідає якому-небудь від’ємному вільному члену,
наприклад t-рядок, і вибирають в ньому який-небудь від’ємний елемент, а
відповідний йому стовпець беруть за розв’язуючий (ми припускаємо, що обмеження
задачі сумісні);
2) складають
відношення елементів стовпця вільних членів до відповідних елементів
розв’язувального стовпця, що мають однакові знаки (симплексні відношення);
3) із
симплексних відношень вибирають найменше. Воно і визначить розв’язуючий рядок.
Нехай ним буде, наприклад, р-рядок;
4) на перетині
розв’язувального рядка і стовпця знаходять розв’язувальний елемент, з яким і
роблять крок жорданові виключення.
Якщо
розв’язувальним виявився елемент t-рядка, то перетворений вільний член
цього рядка стане додатнім. У протилежному випадку після зробленого кроку знову
звертаються до t-рядка. Якщо задача розв'язна, то через деяке число
кроків у стовпці вільних членів не залишиться від’ємних елементів.
Приклад
3.1. Знайти який-небудь опорний план задачі
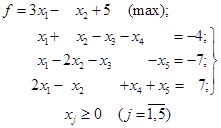
Розв’язок. Задача записана в канонічній
формі, але два вільних члени від’ємні, тому, перед тим як записати задачу в
формі таблиці, помножимо перше і друге рівняння на (–1). У
результаті усі вільні члени у початковій симплексній табл. 3.3 додатні.
А тепер
будемо перекидати нулі з лівого стовпця на верх таблиці. Для першого кроку
жорданове виключення візьмемо розв’язувальним наприклад, четвертий стовпець (у
ньому є додатні елементи!). Розв’язувальним рядок визначиться по мінімальному з
відносин: 4/1 і 7/1. У даному випадку min(4/l; 7/1)=4/1 і відповідає першому
рядку, він і буде розв’язуючим.
Таблиця 3.3 Таблиця
3.4
|
|
1 |
–х1 |
–х2 |
–х3 |
–х4 |
–х5 |
|
|
1 |
–х1 |
–х2 |
–х3 |
–х5 |
|
|
0= |
4 |
–1 |
–1 |
1 |
1 |
0 |
х4= |
4 |
–1 |
–1 |
1 |
0 |
||
|
0= |
7 |
–1 |
2 |
1 |
0 |
1 |
0= |
7 |
–1 |
2 |
1 |
1 |
||
|
0= |
7 |
2 |
–1 |
0 |
1 |
1 |
0= |
3 |
3 |
0 |
–1 |
1 |
||
|
f= |
5 |
–3 |
1 |
0 |
0 |
0 |
f= |
5 |
–3 |
1 |
0 |
0 |
Таблиця
3.5 Таблиця
3.6
|
|
1 |
–х1 |
–х2 |
–х3 |
|
|
1 |
–х1 |
–х2 |
|
|
х4= |
4 |
–1 |
–1 |
1 |
х4= |
2 |
1 |
–2 |
||
|
0= |
4 |
–4 |
2 |
2 |
х3= |
2 |
–2 |
1 |
||
|
х5= |
3 |
3 |
0 |
–1 |
х5= |
5 |
1 |
1 |
||
|
f= |
5 |
–3 |
1 |
0 |
f= |
5 |
–3 |
1 |
Зробивши
ще два кроки жорданових виключень (табл. 3.4–3.6), приходимо до табл. 3.6, у
лівому стовпці якої уже немає нулів: базис виділений. Йому відповідає
початковий опорний план: x1 = 0; х2=0; x3=2; x4=2;
x5=5 чи ![]() = (0; 0; 2;2;5); f(
= (0; 0; 2;2;5); f(![]() )=5.
)=5.
Ми
знайшли опорний план у базисі х3, x4, х5. Якщо
табл. 3.3 перетворювати з іншими розв’язувальними елементами, то вийде інший
базис, а отже, і інший опорний план.
Приклад
3.2. Знайти який-небудь опорний план задачі
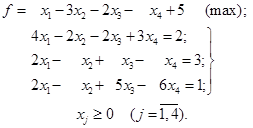
Розв’язок. Записавши задачу в
симплекс-таблицю і зробивши два кроки жорданових виключень (табл. 3.7–3.9),
зауважуємо, що в другому рядку табл. 3.9 всі елементи, крім вільного члена,
нулі; одержуємо 0=2. Отже, система обмежувальних рівнянь несумісна. Задача
нерозв’язна.
Таблиця
3.7 Таблиця
3.8
|
|
1 |
–х1 |
–х2 |
–х3 |
–х4 |
|
|
1 |
–х2 |
–х3 |
–х4 |
|
|
0= |
2 |
4 |
–2 |
–2 |
3 |
0= |
0 |
0 |
–12 |
15 |
||
|
0= |
3 |
2 |
–1 |
1 |
–1 |
0= |
2 |
0 |
–4 |
5 |
||
|
0= |
1 |
2 |
–1 |
5 |
–6 |
х1= |
1/2 |
–1/2 |
5/2 |
–3 |
||
|
f= |
5 |
–1 |
3 |
2 |
1 |
f= |
11/2 |
5/2 |
9/2 |
–2 |
Таблиця 3.9
|
|
1 |
–х2 |
–х3 |
|
х4= |
0 |
0 |
–4/5 |
|
0= |
2 |
0 |
0 |
|
х1= |
1/2 |
–1/2 |
1/10 |
|
f= |
11/2 |
5/2 |
29/10 |
2. Знаходження оптимального опорного плану.
Початковий опорний план ![]() досліджується на
оптимальність:
досліджується на
оптимальність:
1) якщо
в f-рядку немає від’ємних елементів (не вважаючи вільного члена) – план
оптимальний.
Справді, з табл. 3.2
видно, що
f=b00–(b01xr+1+…+b0,n-rxn)
відкіля випливає, що при
b01≥0,
… , b0, n-r≥0
збільшення кожної з вільних змінних xr+1, … , хп викликає зменшення f. Отже, найбільшого
значення f досягає при xr+1=…=хп=0 (від’ємними вони бути не
можуть в силу умови (3.3), тобто при ![]() .
.
Якщо в f-рядку
немає також і нульових елементів, то оптимальний план єдиний; якщо ж серед
елементів є хоча б один нульовий, то оптимальних планів нескінченна безліч;
2) якщо
в f-рядку є хоча б один від’ємний елемент, а у відповідному йому стовпці
немає додатніх, то цільова функція необмежена в припустимій області (f→∞).
Задача нерозв'язна;
3) якщо
в f-рядку є хоча б один від’ємний елемент, а в кожнім стовпці з таким
елементом є хоча б один додатній, то можна перейти до нового опорного плану,
більш близького до оптимального. Для цього стовпець з від’ємним
елементом в f-рядку беруть за розв’язувальний (якщо в f-рядку
від’ємних елементів декілька, розв’язувальним вибирають стовпець з найбільшим
по абсолютній величині від’ємним елементом); визначають за мінімальним
симплексним відношенням розв’язувальний рядок, і роблять крок жорданового
виключення. Отриманий опорний план знову досліджують на оптимальність.
Описаний
процес повторюється доти, поки не буде знайдено оптимальний опорний план або
встановлена нерозв'язність задачі.
Зауваження.
Оскільки minf= – max(–f), задачу мінімізації можна формально
замінити задачею максимізації функції (–f). Але можна цього і не робити.
Ознакою оптимальності опорного плану задачі мінімізації є відсутність додатніх
елементів у f-рядку симплекс-таблиці, що містить опорний план. Вся інша
обчислювальна процедура залишається без змін.
Приклад
3.3. Знайти оптимальний опорний план задачі з приклада 3.1.
Розв’язок.
Знайдений нами в табл. 3.6 опорний план не оптимальний, тому що в f-рядку
присутній від’ємний елемент (–3). У відповідному йому стовпці є додатні
елементи, тому існує можливість поліпшити план. Для одержання нового опорного
плану табл. 3.6 перетворимо кроком жорданового виключення з першим
розв’язувальним стовпцем. Розв’язуючим буде перший рядок, тому що min(2/l; 5/1)
=2/1 відповідає саме йому. У результаті одержуємо табл. 3.10, що містить новий
опорний план ![]() =(2; 0; 6; 0; 3), якому відповідає більше, ніж колишньому,
значення цільової функції:.f(
=(2; 0; 6; 0; 3), якому відповідає більше, ніж колишньому,
значення цільової функції:.f(![]() ) =11. Однак і цей
план не оптимальний, тому що в f-рядку присутній від’ємний елемент (–5).
Зробивши ще один крок із другим розв’язувальним стовпцем, одержуємо табл. 3.11,
у f-рядку якої немає від’ємних елементів. Ознака оптимальності виконана.
Виходить, що опорний план з табл. 3.11 є оптимальним. Отже,
) =11. Однак і цей
план не оптимальний, тому що в f-рядку присутній від’ємний елемент (–5).
Зробивши ще один крок із другим розв’язувальним стовпцем, одержуємо табл. 3.11,
у f-рядку якої немає від’ємних елементів. Ознака оптимальності виконана.
Виходить, що опорний план з табл. 3.11 є оптимальним. Отже, ![]() =(4; 1; 9; 0; 0), fmах=16. Задача розв’язана.
=(4; 1; 9; 0; 0), fmах=16. Задача розв’язана.
Таблиця 3.10 Таблиця 3.11
|
|
1 |
–х4 |
–х2 |
|
|
1 |
–х4 |
–х5 |
|
х1= |
2 |
1 |
–2 |
х1= |
4 |
|
||
|
х3= |
6 |
2 |
–3 |
х3= |
9 |
|||
|
х5= |
3 |
–1 |
3 |
х2= |
1 |
|||
|
f= |
11 |
3 |
–5 |
f= |
16 |
4/3 |
5/3 |
|
Корисно зіставити приведене аналітичне рішення задачі з графічним (рис.
3.2). Таке зіставлення дозволяє наочно простежити за пошуком оптимального
опорного плану і проникнути в геометричну суть симплекс процесу.
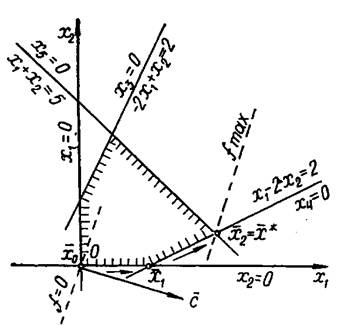
Рис.
3.2
На рис.
3.2 початковому опорному плану ![]() =(0; 0; 2; 2; 5) відповідає точка
=(0; 0; 2; 2; 5) відповідає точка ![]() перетинання прямих x1=0
і x2=0. Кроку жорданового виключення, що перетворить табл.
3.6 у табл. 3.10 і яке призводить до нового опорного плану
перетинання прямих x1=0
і x2=0. Кроку жорданового виключення, що перетворить табл.
3.6 у табл. 3.10 і яке призводить до нового опорного плану ![]() =(2; 0; 6; 0; 3), відповідає перехід у нову вершину
=(2; 0; 6; 0; 3), відповідає перехід у нову вершину ![]() області припустимих
рішень. При цьому ми залишаємося на прямої х2=0, але замість
прямої x1=0 попадаємо на пряму x4=0. У
результаті наступного кроку жорданова виключення одержали опорний план
області припустимих
рішень. При цьому ми залишаємося на прямої х2=0, але замість
прямої x1=0 попадаємо на пряму x4=0. У
результаті наступного кроку жорданова виключення одержали опорний план ![]() = (4; 1; 9; 0; 0), що виявився оптимальним (у f-рядку
немає від’ємних елементів). Цей же висновок випливає і з рис. 3.2: пряма fmax,
рівнобіжна прямій f=0, перетинає припустиму область в точці
= (4; 1; 9; 0; 0), що виявився оптимальним (у f-рядку
немає від’ємних елементів). Цей же висновок випливає і з рис. 3.2: пряма fmax,
рівнобіжна прямій f=0, перетинає припустиму область в точці ![]() =
=![]() , у якій f досягає
максимуму. Процес поліпшення плану, наведений у табл. 3.6, 3.10, 3.11, графічно
означає рух з однієї вершини багатокутника рішень в іншу по напрямку на
оптимальну вершину
, у якій f досягає
максимуму. Процес поліпшення плану, наведений у табл. 3.6, 3.10, 3.11, графічно
означає рух з однієї вершини багатокутника рішень в іншу по напрямку на
оптимальну вершину ![]() :
: ![]() →
→![]() →
→![]() .
.
Приклад
3.4. Розв’язати задачу
Розв’язок. Записавши задачу в
симплекс-таблицю і зробивши два кроки жорданових виключень з розв’язуючими
елементами, обраними серед додатніх чисел основної частини таблиць і
відповідних мінімальним симплексним відношенням ( (табл. 3.12–3.14), одержуємо
початковий опорний план: ![]() =(24; 6; 0; 0). План цей не оптимальний, тому що в f-рядку
табл. 3.14 існують від’ємні елементи.
=(24; 6; 0; 0). План цей не оптимальний, тому що в f-рядку
табл. 3.14 існують від’ємні елементи.
Таблиця
3.12 Таблиця
3.13
|
|
1 |
–x1 |
–x2 |
–x3 |
–x4 |
|
|
1 |
–x2 |
–x3 |
–x4 |
|
|
0= |
84 |
3 |
2 |
–1 |
0 |
x1= |
28 |
2/3 |
–1/3 |
0 |
||
|
0= |
150 |
3 |
13 |
0 |
–1 |
0= |
66 |
11 |
1 |
–1 |
||
|
f= |
0 |
–2 |
–3 |
0 |
0 |
f= |
56 |
–5/3 |
–2/3 |
0 |
Таблиця 3.14 Таблиця
3.15
|
|
1 |
–x3 |
–x4 |
|
|
1 |
–x2 |
–x4 |
|
|
x1= |
24 |
–13/33 |
2/33 |
x1= |
50 |
13/3 |
–1/3 |
||
|
x2= |
6 |
1/11 |
–1/11 |
x3= |
66 |
11 |
–1 |
||
|
f= |
66 |
–17/33 |
–5/33 |
f= |
100 |
17/3 |
–2/3 |
Для чергового кроку розв’язуючим візьмемо перший стовпець, тому що в f-рядку
йому відповідає найбільший по абсолютній величині від’ємний елемент (–17/33). У
цьому стовпці тільки один додатній елемент, він і буде розв’язуючим. У
результаті кроку одержуємо табл. 3.15 з новим опорним планом ![]() =(50; 0; 66; 0). При цьому в f-рядку один з елементів
має від’ємний знак. Однак у стовпці над цим елементом немає жодного додатнього.
Це говорить про необмеженість функції в області припустимих рішень. Задача
розв’язана. На рис. 3.3 наведене її графічне рішення. Початковий опорний план
(24; 6; 0; 0) відповідає на рис. 3.3 вершині
=(50; 0; 66; 0). При цьому в f-рядку один з елементів
має від’ємний знак. Однак у стовпці над цим елементом немає жодного додатнього.
Це говорить про необмеженість функції в області припустимих рішень. Задача
розв’язана. На рис. 3.3 наведене її графічне рішення. Початковий опорний план
(24; 6; 0; 0) відповідає на рис. 3.3 вершині ![]() області припустимих
рішень. У ній f=66. Після кроку жорданового виключення отриманий новий
опорний план (50; 0; 66; 0), якому на малюнку відповідає наступна вершина
області припустимих
рішень. У ній f=66. Після кроку жорданового виключення отриманий новий
опорний план (50; 0; 66; 0), якому на малюнку відповідає наступна вершина ![]() . У цій вершині значення функції f зросло до f=100.
Але і цей опорний план, як видно з малюнка, не є найкращим, тому що допоміжну
пряму f=0 можна зміщати в напрямку вектора
. У цій вершині значення функції f зросло до f=100.
Але і цей опорний план, як видно з малюнка, не є найкращим, тому що допоміжну
пряму f=0 можна зміщати в напрямку вектора ![]() (у напрямку зростання
значень f) як завгодно далеко, оскільки область припустимих рішень не
обмежена.
(у напрямку зростання
значень f) як завгодно далеко, оскільки область припустимих рішень не
обмежена.
Продемонструємо
на прикладах рішення задач з виробничим змістом найбільш часто використовувані
на практиці прийоми перетворення моделей і способи раціоналізації розрахунків.
Рис.
3.3
Приклад
3.5. Знайти оптимальний план розкрою матеріалу за даними
приклада 2.4.
Розв’язок. У прикладі 2.4 була складена
економіко-математична модель (2.21) – (2.25):
Модель
має канонічну форму, і усі вільні члени додатні, тому ніяких попередніх
перетворень не потрібно. Записавши задачу в симплекс-таблицю типу 3.1, відомим
способом (див. приклад 3.1) знаходимо початковий опорний план (табл. 3.16). Він
не оптимальний, тому що в f-рядку містяться додатні елементи (нагадаємо,
що розглядається задача мінімізації!). Виберемо розв’язуючим, наприклад, другий
стовпець. Розв’язуючим елементом, у ньому буде 3/2, тому що min (200:2; 75:3/2)
=75:3/2. Після кроку жорданового виключення приходимо до табл. 3.17, що містить
опорний план ![]() =(0; 50; 100; 0; 150). Цей план оптимальний, тому що в f-рядку
немає додатніх елементів.
=(0; 50; 100; 0; 150). Цей план оптимальний, тому що в f-рядку
немає додатніх елементів.
Таблиця 3.16 Таблиця
3.17
|
|
1 |
–х1 |
–х2 |
|
|
1 |
–х1 |
–х4 |
|||
|
х3= |
200 |
3 |
2 |
х3= |
100 |
1 |
–4/3 |
||||
|
х4= |
75 |
3/2 |
3/2 |
х2= |
50 |
1 |
2/3 |
||||
|
х5= |
50 |
–3 |
–2 |
х5= |
150 |
–1 |
4/3 |
||||
|
f= |
11950 |
100 |
100 |
f= |
6950 |
0 |
–200/3 |
Таблиця 3.18
|
|
1 |
–х2 |
–х4 |
|
х3= |
50 |
|
|
|
х1= |
50 |
||
|
х5= |
200 |
||
|
f= |
6950 |
0 |
–200/3 |
Але в f-рядку присутній нульовий елемент. Це свідчить про те, що
існує ще один опорний оптимальний план. Знайти його можна, перетворивши кроком
жорданова виключення табл. 3.17 з розв’язуючим стовпцем, що містить нульовий
елемент f-рядка. Розв’язувальний рядок визначається звичайним чином,
тобто за мінімальним симплексним відношенням. Другий опорний оптимальний план
(табл. 3.18) має вигляд: ![]() =(50; 0; 50; 0; 200). Але в такому випадку будь-яка опукла лінійна
комбінація опорних планів
=(50; 0; 50; 0; 200). Але в такому випадку будь-яка опукла лінійна
комбінація опорних планів ![]() і
і ![]() :
: 
також буде являти собою оптимальний план.
Наявність не єдиного оптимального плану з
практичної точки зору є дуже зручним, тому що існує можливість вибрати параметр
λ з урахуванням інших показників, що характеризують план, але таких, що не
знайшли відображення в цільовій функції. За змістом нашої задачі компоненти
оптимального плану повинні виражатися цілими числами, і це варто пам'ятати при
виборі λ.
Приклад 3.6. Знайти оптимальний план
випуску велосипедів і мотоциклів за умовами приклада 2.1.
Розв’язок. Модель задачі (2.1) – (2.6) приводимо до канонічної
форми:

Оскільки кожна з
додаткових змінних х3, … , х6 входить тільки в одне
з рівнянь, причому з коефіцієнтом + 1, їх можна вважати базисними, а змінні x1
і х2 – вільними. Тому при x1=x2=0 відразу виходить початковий опорний план: ![]() = (0; 0; 100; 30; 1;
1), і симплекс-таблиці будуть потрібні лише для виконання другого етапу
симплекс процесу: пошуку оптимального опорного плану. Таким чином, в даному
прикладі на відміну від попередніх немає необхідності записувати систему
обмежувальних рівнянь у формі 0-рядків. Її варто записати у вигляді,
розв’язаному щодо базисних змінних; цільова функція також виражена через вільні
змінні (табл. 3.19).
= (0; 0; 100; 30; 1;
1), і симплекс-таблиці будуть потрібні лише для виконання другого етапу
симплекс процесу: пошуку оптимального опорного плану. Таким чином, в даному
прикладі на відміну від попередніх немає необхідності записувати систему
обмежувальних рівнянь у формі 0-рядків. Її варто записати у вигляді,
розв’язаному щодо базисних змінних; цільова функція також виражена через вільні
змінні (табл. 3.19).
Таблиця 3.19 Таблиця
3.20
|
|
1 |
–х1 |
–х2 |
|
|
1 |
–х5 |
–х6 |
|
х3= |
100 |
1 |
0 |
х3= |
52 |
|
||
|
х4= |
30 |
0 |
1 |
х2= |
24 |
|||
|
х5= |
1 |
1/120 |
1/40 |
х1= |
48 |
|||
|
х6= |
1 |
1/80 |
1/60 |
х4= |
6 |
|||
|
f= |
0 |
–2 |
–3 |
f= |
168 |
24 |
16 |
|
Далі задача розв’язується звичайним шляхом. В результаті приходимо до табл.
3.20 з оптимальним планом (48; 24; 52; 6; 0; 0), fmax
=168.
Отже, випускати
слід 48 тис. велосипедів і 24 тис. мотоциклів. Максимальний прибуток буде
дорівнювати 168 тис. грн.
Приклад
3.7. Знайти оптимальний план будівництва житлових будинків за
умовами прикладу 2.2.
Розв’язок. Після
приведення до канонічної форми модель задачі (2.7) – (2.12) набуде такого
вигляду:
Оскільки змінні x6 і x7
входять в систему обмежувальних рівнянь тільки по одному разі і з коефіцієнтом
+ 1, їх можна віднести до базисних. Що ж стосується змінної x8,
то вона хоч і входить тільки в четверте рівняння, але з коефіцієнтом (–1), а
тому не може бути включена в базис, тому що при нульових значеннях інших
змінних одержимо –x8=10 чи x8= –10, а це
неприпустиме значення. Отже, четверте рівняння, як і перше, варто записати в
початкову симплекс-таблицю у формі 0-рядка (табл. 3.21).
Таблиця 3.21
|
|
1 |
–х1 |
–х2 |
–х3 |
–х4 |
–х5 |
–х8 |
||
|
0= |
100 |
1 |
1 |
1 |
1 |
1 |
0 |
||
|
х6= |
3000 |
20 |
30 |
35 |
30 |
40 |
0 |
||
|
х7= |
4500 |
40 |
20 |
60 |
35 |
25 |
0 |
||
|
0= |
10 |
0 |
1 |
0 |
0 |
0 |
–1 |
||
|
f= |
0 |
–3 |
–2 |
–5 |
–4 |
–6 |
0 |
Таблиця 3.22
|
|
1 |
–х3 |
–х4 |
–х6 |
–х8 |
|
х1= |
45 |
|
|||
|
х5= |
45 |
||||
|
х7= |
1375 |
||||
|
х2= |
10 |
||||
|
f= |
425 |
1/4 |
1/2 |
3/20 |
5/2 |
Далі за допомогою відомих перетворень потрібно знайти початковий базис з
опорним планом, а після цього перебором опорних планів визначити оптимальний. У
результаті перетворень одержимо табл. 3.22. З неї випливає, що за оптимальним
планом слід побудувати 45 будинків I типу, 45 будинків V типу і 10 будинків II типу.
Будинки III і IV типів будувати не слід (![]() ). При цьому загальна житлова площа складе 425 тис. м2.
). При цьому загальна житлова площа складе 425 тис. м2.
Додаткові
змінні x6 і x7 означають невикористаний в
оптимальному плані робочий час, передбачений на закладання фундаментів і виконання
інших робіт. З табл. 3.22 видно, що фонд часу на закладку фундаментів
витрачений цілком (![]() ), але не використано 1375 робочих днів на виконання інших
робіт (
), але не використано 1375 робочих днів на виконання інших
робіт (![]() ).
).
Задача 1
Графічним
методом розв’язати задачу лінійного програмування, де під extr розмішується max i min.
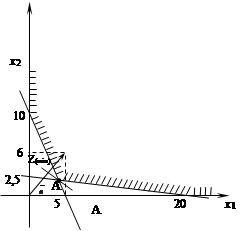
![]() (25;30) або
(25;30) або ![]() (5;6) – вектор градієнт функції, що вказує напрямок
зростання цільової функції.
(5;6) – вектор градієнт функції, що вказує напрямок
зростання цільової функції.
f(min) – досягається в точці А;
f(mах) – не
існує.
![]()
f(min)=Z(A)=Z(4;2)=25·4+30·2-10=150;
Отже:
f(min)=150,
досягається при х1=4; х2=2;
f(mах) – не
існує.
Розв’яжемо аналітично (симплексним методом) задачу лінійного програмування
із цього завдання і здійснимо перевірку отриманих результатів, порівнявши із
оптимальним планом відповідної задачі розв’язаної графічним методом (цільову
функцію спочатку мінімізуємо а потім максимізуємо).
Маємо
наступні таблиці:
Таблиця 1. Таблиця 2.
|
|
1 |
–х1 |
–х2 |
–х3 |
–х4 |
|
|
1 |
–х2 |
–х3 |
–х4 |
|
|
0= |
60 |
3 |
24 |
–1 |
0 |
0= |
45 |
22,5 |
–1 |
0,02 |
||
|
0= |
750 |
150 |
75 |
0 |
–1 |
х1= |
5 |
0,5 |
0 |
–0,0067 |
||
|
f= |
–10 |
–25 |
–30 |
0 |
0 |
f= |
115 |
–17,5 |
0 |
–0,1667 |
Таблиця 3.
|
|
1 |
–х3 |
–х4 |
|
х2= |
2 |
–0,0444 |
0,0009 |
|
х1= |
4 |
0,0222 |
–0,0071 |
|
f= |
150 |
–0,7778 |
–0,1511 |
Опорний
план знайдено
Відшукаємо
мінімум цільової функції
Оскільки
f –
стрічка містить тільки від’ємні елементи, то мінімум функції знайдено.
Оптимальний
план:
х1=4; х2=2;
х3=0; х4=0;
f(min)=150
Відшукаємо
максимум цільової функції.
З
попередніх обчислень маємо таблицю:
Таблиця 4. Таблиця 5.
|
|
1 |
–х3 |
–х4 |
|
|
1 |
–х1 |
–х4 |
|
|
х2= |
2 |
–0,0444 |
0,0009 |
х2= |
10 |
2 |
–0,0133 |
||
|
х1= |
4 |
0.0222 |
–0,0071 |
х3= |
180 |
45 |
–0,32 |
||
|
f= |
150 |
–0.7778 |
–0,1511 |
f= |
290 |
35 |
–0,4 |
Виник
недодатній стовпчик, тобто цільова функція необмежена в допустимій області.
Максимум
відшукати неможливо.
Задача 2
Графічно
розв’язати задачу лінійного програмування.
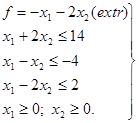
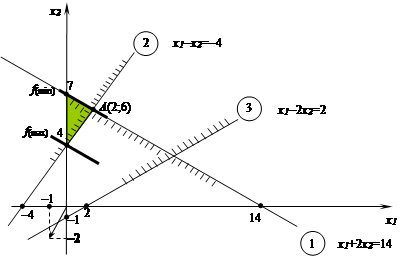
![]() (–1;–2) – вектор-градієнт, що вказує напрямок зростання
цільової функції.
(–1;–2) – вектор-градієнт, що вказує напрямок зростання
цільової функції.
З графічних міркувань видно, що максимум досягається
в точці х1=0; х2=4;
f(max)=–0–2·4=–8;
Мінімум
досягається в точці А(2;6), тобто при х1=2; х2=6;, або в точці х1=0; х2=7; тобто на прямій х1+2х2=14 оскільки вектор-градіент ![]() (–1;–2) є перпендикулярний цій прямій.
(–1;–2) є перпендикулярний цій прямій.
f(min)=–2–2(6)=–2–12=–14;
f(min)=–0–2(7)=–14;
Отже: f(min)=–14 досягається на прямій х1+2х2=14;
f(max)=–8
досягається при х1=0;
х2=4.
Розв’яжемо аналітично симплексним методом задачу лінійного програмування із
цього завдання.
Маємо таку таблицю.
Таблиця
1.
|
|
1 |
–х1 |
–х2 |
–х3 |
–х4 |
–х5 |
||
|
0= |
14 |
1 |
2 |
1 |
0 |
0 |
||
|
0= |
4 |
–1 |
1 |
0 |
–1 |
0 |
||
|
0= |
2 |
1 |
–2 |
0 |
0 |
1 |
||
|
f= |
0 |
1 |
2 |
0 |
0 |
0 |
Таблиця
2.
|
|
1 |
–х1 |
–х2 |
–х3 |
–х4 |
||
|
0= |
14 |
1 |
2 |
1 |
0 |
||
|
0= |
4 |
–1 |
1 |
0 |
–1 |
||
|
х5= |
2 |
1 |
–2 |
0 |
0 |
||
|
f= |
0 |
1 |
2 |
0 |
0 |
Таблиця
3. Таблиця 4.
|
|
1 |
–х1 |
–х2 |
–х4 |
|
|
1 |
–х1 |
–х4 |
|
|
х3= |
14 |
1 |
2 |
0 |
х3= |
6 |
3 |
2 |
||
|
0= |
4 |
–1 |
1 |
–1 |
х2= |
4 |
–1 |
–1 |
||
|
х5= |
2 |
1 |
–2 |
0 |
х5= |
10 |
–1 |
–2 |
||
|
f= |
0 |
1 |
2 |
0 |
f= |
–8 |
3 |
2 |
Опорний план знайдено.
Відшукаємо мінімум цільової функції.
Таблиця
5
|
|
1 |
–х3 |
–х4 |
|
х1= |
2 |
1/3 |
2/3 |
|
х2= |
6 |
1/3 |
–1/3 |
|
х5= |
12 |
1/3 |
–4/3 |
|
f= |
–14 |
–1 |
0 |
Оскільки f–стрічка
містить тільки недодатні елементи, то мінімум функції знайдений. Оскільки f–стрічка містить нуль, то оптимальних планів безліч.
Оптимальний план (один з безліч):
х1=2; х2=6;
х3=0; х4=0; х5=12.
f(min)=–14.
Відшукаємо максимум цільової функції.
З попередніх обчислень маємо таблицю:
Таблиця
6
|
|
1 |
–х1 |
–х4 |
|
х3= |
6 |
3 |
2 |
|
х2= |
4 |
–1 |
–1 |
|
х5= |
10 |
–1 |
–2 |
|
f= |
–8 |
3 |
2 |
Оскільки f-стрічка
містить тільки невід’ємні елементи, то максимум функції знайдений.
Оптимальний план (єдиний):
х1=0;
х2=4; х3=6; х4=0; х5=10.
f(max)=–8.

