6 СТАТИКА КРИВОШИПНО-ПОВЗУННИХ МЕХАНІЗМІВ ПРЕСІВ
6.1
Статика
ідеального кривошипного механізму
Головні
виконавчі механізми кривошипних пресів та автоматів відносяться до групи
силових механізмів, в яких сили інерції малі по відношенню до корисних сил
деформування. Тому відповідно до теорії кривошипних пресів пропонується
виконувати розрахунок ГВМ на корисні та шкідливі сили (сили тертя).
В ідеальному
кривошипному механізмі (рис. 6.1) силами тертя нехтують.
Вважаємо заданим зусилля на повзуні РD, яке визначається величиною
корисного опору деформуванню. З трикутника сил в ідеальному механізмі
визначаємо силу ![]() , що
діє вздовж шатуна та силу, спрямовану нормально до направляючих повзуна
, що
діє вздовж шатуна та силу, спрямовану нормально до направляючих повзуна ![]() .
.
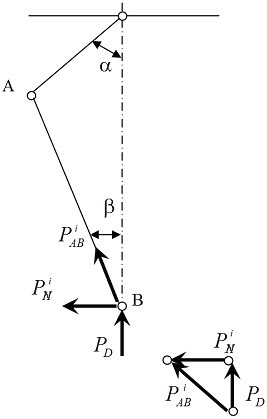
Рис. 6.1 – Сили, що діють в ідеальному КПМ.
З рисунку видно, що
 ,
,
![]() .
.
Маючи на увазі, що ![]() , а
, а ![]() ,
, ![]() , отримаємо
, отримаємо
 ,
,  ,
,  ,
,  .
.
За аналогією з кінематичними
розрахунками, при малих значеннях λ,
k та sinα, знаменник можна
прийняти рівним одиниці. Тоді отримаємо наближені залежності:
![]() ,
, ![]() .
.
Максимальне
значення похибки буде мати місце при α=90º,
т.т. коли машина перебуває в ненавантаженому стані.
6.2 Визначення крутного моменту на колінчастому валу
ідеального КПМ
Для
визначення величини крутного моменту на кривошипному валі ідеального КПМ
скористуємось рівнянням елементарних робіт:
![]() або
або  .
.
З кінематики
ідеального центрального (аксіального) КПМ відомо, що:
 ,
,  .
.
Або
![]() ,
,  .
.
Таким чином
 .
.
Отже
 .
.
Аналогічним
чином для ідеального дезаксіального КПМ можна
отримати формулу крутного моменту на кривошипному валі:
 .
.
Розділимо
обидві частини цих рівнянь на РD
та позначимо  . Тоді, для пресів з верхнім розташуванням кривошипного валу
. Тоді, для пресів з верхнім розташуванням кривошипного валу
 та
та  .
.
Для пресів з
нижнім розташуванням валу
 та
та  .
.
В цих
рівняннях величину ![]() прийнято називати
ідеальним приведеним плечем сили, т.т. крутним
моментом віднесеним до одиниці зусилля на повзуні. По суті
прийнято називати
ідеальним приведеним плечем сили, т.т. крутним
моментом віднесеним до одиниці зусилля на повзуні. По суті ![]() чисельно рівне
відношенню лінійної швидкості повзуна до колової швидкості кривошипу (
чисельно рівне
відношенню лінійної швидкості повзуна до колової швидкості кривошипу (![]() ). Його використання значно спрощує розрахунки.
). Його використання значно спрощує розрахунки.
Таким чином
загальна формула крутного моменту буде мати вигляд
![]() .
.
Оскільки ![]() в цій формулі є
функцією кута α, то і
в цій формулі є
функцією кута α, то і ![]() буде змінюватись в
залежності від кута повороту колінчастого валу преса.
буде змінюватись в
залежності від кута повороту колінчастого валу преса.
6.3 Статика
реального кривошипного механізму. Схема сил в реальному КПМ
Якщо
розглядати ідеальну машину, то всі зусилля спрямовані по геометричній осі
робочих деталей. Це дійсно має місце в умовах відсутності тертя.
В реальному
КПМ (рис. 6.2) крім розглянутих раніше сил та
моментів діють ще моменти тертя в шарнірах та сила опору тертя переміщенню
повзуна в направляючих.
Таким чином,
з врахуванням тертя, зусилля вже неможливо спрямувати по геометричній осі
важелів. В цьому випадку зусилля будуть спрямовані по дотичній до кругу тертя в
цапфах важелів КПМ.
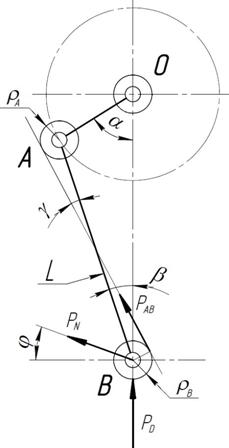
Рис. 6.2 – Схема сил, що діють в реальному КПМ.
Будуємо
круги тертя в цапфах А та В (див. рис. 1.9). Причому радіуси
кругів тертя будуть рівні:
![]() та
та ![]() ,
,
де ![]() – коефіцієнт тертя, а
– коефіцієнт тертя, а ![]() та
та ![]() – радіуси кругів тертя
в розглядуваних точках.
– радіуси кругів тертя
в розглядуваних точках.
Відхилення
діючого зусилля від геометричної осі приводить до згину важеля, що враховується
при конструюванні шляхом збільшення розмірів.
6.4 Сили, що діють в реальному кривошипному механізмі
Побудуємо
трикутник сил (рис. 6.3), що діють на
кривошипно-шатунний механізм в реальному пресі, т.т.
з врахуванням сил тертя. Для визначення величини цих сил необхідно визначити
кути трикутника сил.
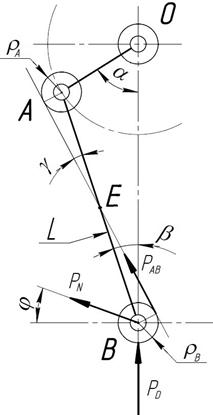
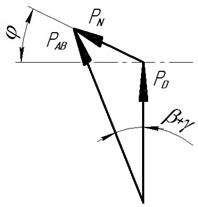
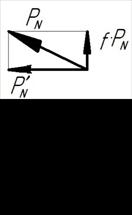
Рис. 6.3 – Векторний план сил, що діють в реальному КПМ.
Векторний
план сил РАВ та РN буде мати виглядати:
![]() .
.
Сила РАВ нахилена під кутом β+γ. Кут γ
можна визначити з рівняння суми:
АЕ+ВЕ=L.
З
побудованої схеми КПМ
 ,
,  .
.
Тоді
 .
.
З векторного
трикутника сил будемо мати
 .
.
В реальних
КПМ пресів та автоматів кут φ
рідко перевищує 5º (при f=0,1),
кут γ≤3º, а кут β при робочих кутах α не перевищує 10º. Таким
чином, функція  в цілому приймає
значення від 1 до 1,06. Без великої похибки можна прийняти, при λ=0,25
в цілому приймає
значення від 1 до 1,06. Без великої похибки можна прийняти, при λ=0,25
![]() .
.
Сила РN внаслідок тертя в
направляючих також буде відхилена від горизонталі на кут φ. Її можна визначити з виразу
 .
.
Нормальна
складова реакції в направляючих ![]() . Тоді
. Тоді
 .
.
Як вже
відмічалось ![]() , добуток
, добуток ![]() не перевищує
0,02...0,03. Тому без великої похибки можна прийняти
не перевищує
0,02...0,03. Тому без великої похибки можна прийняти
![]() .
.
З кінематики
КПМ відомо, що ![]() . Тоді
. Тоді
![]() .
.
З цієї
залежності видно, що раціональний вибір значень k (коефіцієнту дезаксіалу) може суттєво
зменшити тиск на направляючі повзуна пресу. Особливо це спостерігається при
великих мінусових значеннях k.
6.5 Визначення крутного моменту на колінчастому валу
реального кривошипно-повзуного механізм
Крутний
момент на колінчастому валу в реальній машині знайдемо з рівняння балансу
елементарних робіт при повороті колінчастого валу на кут dα:
![]() ,
,
де P01 та r01 – реакція та радіус підшипника в першій опорі
колінчастого валу;
P02 та r02 – реакція та радіус підшипника в другій опорі
колінчастого валу.
Записаний
вираз балансу робіт можна спростити. Сила PN складає не більше 0,3PD. Добуток fPN складе не більше 3 %
першого члена та менше 3 % від суми першої частини. В практичних
розрахунках такою величиною можна нехтувати. З врахуванням цього, та розділивши
праву та ліву частини на dα (пам'ятаючи, що PN ≈PD) можна записати
 .
.
Але  .
.
Далі продиференціюємо відоме рівняння ![]() . Маємо
. Маємо
![]() ;
;
 .
.
В цьому
випадку
 .
.
Оскільки
другий член правої частини цього рівняння залежить лише від умов тертя його
можна записати в такому вигляді
![]() ,
,
де  .
.
Величину ![]() прийнято називати
приведеним відносним плечем тертя, за аналогією з приведеним відносним плечем
прийнято називати
приведеним відносним плечем тертя, за аналогією з приведеним відносним плечем ![]() .
.
Оскільки
сума реакцій в опорах валу приблизно рівна PD, а r01=r02=r0, то наближено можна записати
![]() .
.
В практиці
розрахунків нехтують незначною зміною ![]() та приймають
максимальне значення
та приймають
максимальне значення ![]() при
при ![]() :
:
![]() – для пресів з верхнім
кривошипом;
– для пресів з верхнім
кривошипом;
![]() – для пресів з нижнім
кривошипом.
– для пресів з нижнім
кривошипом.
Для
розрахунку крутного моменту на кривошипному валі користуються зазвичай формулою
![]() ,
,
де ![]() .
.
З
проведеного кінетостатичного аналізу КПМ пресів
зробимо важливий висновок:
–
в реальній машині при α=0
та певному PD
використовуваний крутний момент на колінчастому валі має цілком визначену
величину, яка відмінна від 0, і, навпаки, будь-який крутний момент в кінці ходу
може створювати лише цілком визначене кінцеве зусилля;
–
в ідеальній машині при Мк≠0 та α=0
на повзуні отримуємо зусилля нескінченно великої величини.

