LABORATORY WORK №15
CAPACITIVE
PROXIMITY SENSORS. OPTICAL PROXIMITY SENSORS
15.1. Objective
Analyze
characteristics and applications of different position sensor types.
15.2. Task
Use experimental
investigation to obtain sensibility characteristics of different position
sensor types:
·
inductive
proximity sensor;
·
capacitive
proximity sensor;
·
optical
proximity sensor;
·
ultrasonic
proximity sensor.
Investigate the
optical proximity sensor usage for rotation speed measurement.
15.3. Capacitive Proximity
Sensors
Capacitive
proximity switches detect conductive and non-conductive materials that can be
in a solid or liquid state. They serve the purpose of monitoring product levels in
containers, checking contents in filling and packaging systems as well as
detecting, positioning, monitoring and counting objects, e.g. in sequence
control systems, conveyor belts. Used for detecting media such as:
·
solid: wood, ceramic,
glass, paper stacks, plastic, stone, rubber, ice, nonferrous metals, potatoes.
·
liquid: water,
oil, beverages, adhesives, paints.
·
granular:
plastic pellets, granulated products, grain, fodder, wood chip.
·
powder: dyes,
detergents, sand, cement, fertilizer, salt, sugar, flour, coffee.
The function of
the capacitive proximity switch is based on evaluating the influence exerted by
an actuator on the electrical field at the active face of the switch. The
approach of an influencing object increases the capacitance of the capacitor,
which consists of a sensor electrode located behind the active face and the
actuator connected to earth / mass. This increase in capacitance is dependent
on the conductance and the dielectric constant of the actuator as well as its
mass, surface area and its distance from the sensor electrode. The capacitive
limit switch is equipped with an RC oscillator with a gain factor that
increases as a result of the rise in capacitance of the previously described
capacitor to such an extent that oscillation is induced. In limit switches, the
capacitance required to induce oscillation can be determined by the built-in
potentiometer intervening in the feedback of the oscillator. The block diagram
of a capacitive proximity sensor is presented in Fig. 15.3.1.
The response
sensitivity, i.e. the sensing distance with a given actuator can be adjusted in
this way. The oscillator output signal is fed to an evaluation circuit that
actuates the switching amplifier. In response to the approach of conductive
material the actuating object and the active face of the sensor form the plates
of a capacitor.
The change in
capacitance and the consequently achievable sensing distance are large. In
response to the approach of nonconductive
material ε > 1 only
the change in the dielectric constant is effective. The increase in capacitance
is less than is the case for conductive materials. The resulting sensing
distance is small. The maxi-mum obtainable switching distance of industrial
capacitive sensors is approximately 60 mm. Reduction factors for some materials
are presented in Table 15.1, the main parameters for the BERNSTEIN
KCN–T12PS/004 M12 capacitive proximity sensor (used in laboratory equipment) –
in Table 15.1.
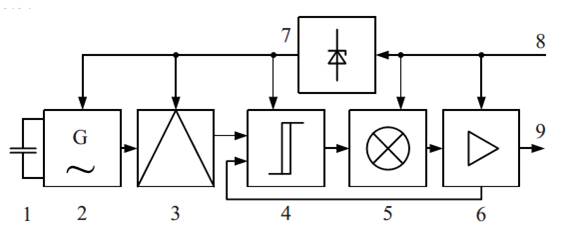
Fig.
15.3.1. Block diagram of a capacitive proximity sensor
Table 15.1
Target material reduction
factor of capacitive proximity sensor
|
Material |
|
Reduction Factor |
|
All metals |
– |
1.0 |
|
Water |
80.8 |
1.0 |
|
Marble |
8.4 – 14 |
|
|
Glass |
3 – 0.5 |
0.3 – 0.5 |
|
Stack of dry paper |
2 |
|
|
Ceramic |
4.2 – 6.5 |
|
|
Oil |
|
|
Sensitivity of
capacitive proximity sensor with regard to humidity is very high due to the
high dielectric constant of water. They are very sensitive to the dirt also. On
the other hand, they can be used for detection of objects through a
non-metallic wall. The wall thickness in this case should be less than 4 mm and
the dielectric constant of the material to be detected should be higher by a
factor of 4 than that of the wall. Capacitive proximity sensors can be used for
monitoring the winding of electrical wires and cables, because they react to
copper containing electrical wires or cables of relatively small diameter,
whereas inductive proximity sensors react at a smaller switching distance or
not at all.
Optical Proximity Sensors
Optical
proximity sensors use light beam for detection of objects. Red or infrared
light is used for this purpose. Semiconductor light emitting diodes (LEDs) or
lasers are a particularly reliable source of red and infrared light. They are
small and robust, have a long service life and can be easily modulated.
Photodiodes or pho-totransistors are used as receiver elements. When adjusting
optical proximity sensors, red light has the advantage that it is visible in
contrast to infrared light. Besides, polymer optic cables can easily be used in
red wavelength range because of their reduced light attenuation. Infrared (non
visible) light is used in instances, where increased light performance is
required in order to span greater distances for example. Furthermore, infrared
light is less susceptible to interference (ambient light). With both types of
optical proximity sensor, additional suppression of external light influences
is achieved by means of modulating the optical signal. The receiver (with the
exception of through-beam sensors) is tuned to the pulse of the emitter. With
through-beam sensors an electrical band-pass is used in the receiver.
Particularly in the case of infrared light, the use of daylight filters further
improves insensitivity to ambient light.
Usually the 660 nm wavelength emitters are used for
visible red beam sensors with fibreoptic connection and 880 nm – for infrared sensors without
fibreoptic.
Depending to the
light beam path optical proximity sensors can be divided into barriers
(through-beam and retro-reflective) and diffuse sensors (Fig. 15.3.2).
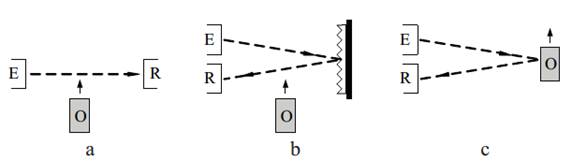
Fig. 15.3.2. Optical
proximity sensors: a – through-beam; b – retro-reflective;
c – diffuse; where E –
emitter; R – receiver; O – object
Through-beam
sensors consist of
separately assembled emitter and receiver components whereby wide sensing
ranges can be achieved. For the interruption of the light beam to be evaluated,
the cross-section of the active beam must be covered. The object should permit
only minimum penetration of light, but may reflect any amount of light. These
sensors have enhanced reliability because of permanent light during
non-operation, wide range, can detect small objects at large distances, are
suitable for aggressive environment, good positioning accuracy, but two
separate proximity sensor modules (emitter and receiver) and separate
electrical connections are required, failure of the emitter is evaluated as «object present» (important with accident prevention applications).
Retro-reflective
sensors have light emitter
and light receiver installed in one single housing. An additional reflector is required.
Interruption of the light beam is evaluated. Interruption of the light beam
must not be compensated by direct or diffuse reflection of an object.
Transparent, bright or shiny objects may in some cases remain undetected.
Mirroring objects must be positioned in such a manner that the reflecting beam
does not impinge on the receiver. Failure of the emitter is evaluated as
«object present» too.
Diffuse sensors have the emitter and receiver fitted in the
same housing too. The object diffusely reflects a percentage of the emitted
light thereby activating the receiver. The switching distance largely depends
on the reflectivity of the object. The size, surface, shape, density and color
of the object as well as the angle of impact determine the intensity of the
diffused light so that as a rule only small distances within a range of a few
decimeters can be scanned. The background must absorb or deflect the light
emission, i.e. when an object is not present, the reflected light beam must be
clearly below the response threshold of the receiving circuit. The right
sensivity adjustment is very important for these sensors. Failure of the
emitter is evaluated as «no object present». Transparent and non-reflective
(black) object recognition is complicated. Different material sensivity
correction factors are presented in Table 15.2.
Usually the
emitter and receiver pulse sinchronization is implemented for better influence
cancelling. Typical optical sensor block diagram is presented in Fig. 15.3.3.
Table 15.2
Target material correction
factors for diffuse optical proximity sensor
|
Material |
Correction Factor |
|
Cardboard, white |
1.0 |
|
Expanded polystyrene, white |
1.0 – 1.2 |
|
Metal, shiny |
1.2 – 2.0 |
|
Wood, coarse |
0.4 –0.8 |
|
Cotton material, white |
0.5 – 0.8 |
|
PVC, grey |
0.4 – 0.8 |
|
Cardboard, black shiny |
0.3 |
|
Cardboard, black matt |
0.1 |
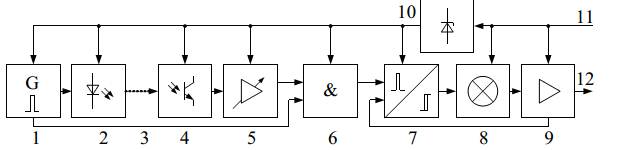
Fig. 15.3.3.
Block diagram of optical proximity sensors
The main
parameters for FESTO SOE – L series optical proximity sensor with fiber optic
(used in laboratory equipment) are presented in Table 15.2. Sensors without
fiber optic have very similar characteristics, too.
15.4. Method of testing
1.
Install the
capacitive proximity sensor (looks like blue plastic screw with wiring) on a
testbench to the measuring scale as shown in Fig. 14.4.1 and adjust the zero
position.
2.
Connect the
sensor to a power supply and a load according to the scheme at Fig. 15.4.1,
using relay and indication units.
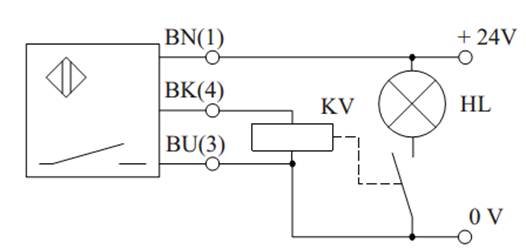
Fig. 15.4.1. Sensor
connection diagram
3.
Perform the
sensor switching distance measurements: for each of four provided material
plates (check the material!) find distances x1
– switch-off point moving from sensor; x2 – switch-on point moving to the sensor; ![]() – hysteresis.
Write the obtained results write in Table 15.3.
– hysteresis.
Write the obtained results write in Table 15.3.
Table 15.3
Sensor testing results
|
Material |
|
|
|
|
Iron |
|
|
|
|
Aluminium |
|
|
|
|
Copper |
|
|
|
|
Plastic |
|
|
|
4.
Perform
steps 1 to 3 for inductive and optical sensor.
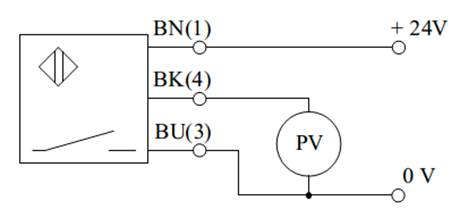
Fig. 15.4.2. Ultrasonic
sensor connection diagram
5.
Perform the
ultrasonic sensor test: connect it according to the schematic at Fig. 15.4.2,
and measure the output voltage moving the obstacle (perpendicular book) in
front of the sensor every 5 cm till 1
m. Make a reliance graph.
6.
Perform a motor
shaft rotation speed measurement using an optical retro-reflective proximity
sensor. Take a look at Fig. 15.4.3, and make connections: connect power to the
counter, motor and sensor; connect voltmeter to the motor unit control output;
connect sensor output to «CLOCK» input of counter unit. Put the counter unit
switch to the «imp. / s» position. Take a counter marks every 1V motor control voltage increase and put
them into Table 15.4. Calculate the rotation speed for each value using
formula:
![]() [rpm]
[rpm]
where: N – counter indication; n – pulse number per rotation (count the
holes on the disc). Make rotation speed ω
dependence to the control voltage chart.
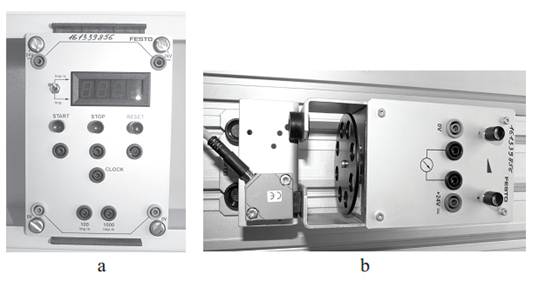
Fig. 15.4.3. Motor shaft
rotation speed measurement equipment:
a – counter
unit; b – motor unit with installed optical sensor
Table 15.4
Rotation speed
measurement results
|
Control voltage, V |
Counter indication, |
Rotation speed, rpm |
|
|
|
|
15.5. Content of
Report
1.
Objective, task
and model of the laboratory work.
2.
Work results
(connection diagrams, tables and charts).
3.
Conclusions.
15.6. Control
questions
1.
What does
«proximity sensor» mean?
2.
Explain
operation principle of inductive proximity sensor.
3.
What are the
main characteristics of inductive proximity sensor?
4.
Explain
operation principle of capacitive proximity sensor.
5.
What are the
main characteristics of capacitive proximity sensor?
6.
Explain
operation principles of optical proximity sensor.
7.
What are the
main characteristics of optical proximity sensor?
8.
Explain
operation principles of ultrasonic proximity sensor.
9.
What are the
main characteristics of ultrasonic proximity sensor?
10. Find three application examples for each mentioned
sensor type.

