Лекція 1.
4 Електромеханічні
прилади прямого перетворення
Якщо покази ВП відображаються у
вигляді переміщення стрілки, то прилад називається електромеханічним. Якщо у
вигляді цифр на індикаторі – то електронним або цифровим.
Схема
електромеханічного аналогового приладу на Рис 6.б.
Вимірювальне коло
перетворює вимірювану величину Хвим в
електричну величину Х1, що
безпосередньо впливає на
вимірювальний механізм.
Вимірювальний механізм (ВМ) –
перетворює електричну енергію в механічну енергію переміщення вказівника. Під
дією вимірюваної величини Х1 створюється
обертовий момент МОБ, що повертає рухому частину ВМ на кут α.
електромагнітна енергія перетворюється в механічну енергію переміщення рухомої частини ВМ. Обертовий момент, що залежить від
вимірюваної величини Х і кута
повороту знаходиться як
МОБ
= dWe
/da,
де We
- енергія електромагнітного поля,
зосереджена у вимірювальному механізмі.
Для того, щоб кожному значенню вимірюваної
величини відповідало певне значення кута відхилення α рухомої частини, у
ВМ необхідно створити протидіючий
момент МПР, який
направлений назустріч обертовому моменту і пропорційний до кута повороту. Протидіючий
момент може створюватися механічним способом (пружинами, розтяжками), або
самою вимірюваною величиною логометри.
При механічному створенні
протидіючого моменту МПР
= Wα, де W - питомий протидіючий момент. З умови сталої рівноваги
МОБ = МПР dWe
/dα = Wα
отже,
кут повороту рухомої частини залежить від вимірюваної величини і параметрів
приладу
a = F(X, A)= [dWe
/dα]/ W
де А -
параметри вимірювального механізму.
Це рівняння називається рівнянням перетворення вимірювального
механізму електромеханічного приладу.
Механізми, в яких протидіючий момент
створюється вимірюваною величиною,
називаються логометрами.
Відліковий
пристрій служить для візуального відліку значень вимірюваної величини і
складається з шкали і покажчика.
При роботі електромеханічного приладу,
окрім обертаючого і протидіючого моментів, виникають моменти, зумовлені
інерцією, опором середовища, вихровими струмами (стрілка шкали коливається біля
значення). Під дією цих моментів рухома частина буде переміщуватися, доки не
наступить рівність обертального і протидіючого моментів, час необхідний для
цього називається час заспокоєння. Для забезпечення необхідного часу
заспокоєння в аналогових приладах використовують пристрої, що створюють
заспокоюючий момент - заспокоювачі.
У електромеханічних приладах застосовують повітряні, рідинні і магнітоіндукційні
заспокоювачі.
В повітряному заспокоювачем є легке алюмінієве
крило, розміщене в повітряній камері і жорстко з’єднане з рухомою частиною, при
русі якої крило переміщується з однієї частини камери в іншу, створюючи
заспокійливий момент. Магнітоіндукційний
заспокоювач складається з постійного магніта і крила з
немагнітного матеріалу, зв’язаного з рухомою частиною ВМ. При русі рухомої
частини крило починає рухатись і при перетині поля постійного магніта
в ньому наводяться вихрові струми, взаємодія яких з полем постійного магніту
створює заспокоюючий момент.
Залежно від принципу дії вимірювального
механізму електромеханічні прилади розділяються на наступні групи: магнітоелектричні, електромагнітні,
електродинамічні, феродинамічні, електростатичні, індукційні.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

1.Магнітоелектричні (МЕ)
Принцип
дії заснований на взаємодії струму катушки з
магнітним полем постійного магніта.
Виконуються у вигляді нерухомого постійного магніту і рухомої котушки,
виготовленої у виді рамки або рідше з нерухомою котушкою і рухомим магнітом.
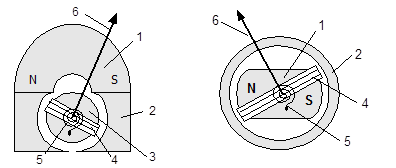
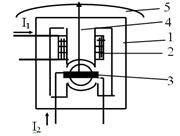
Рис
1.8. Будова МЕ механізму
Складається з постійного
магніту 1, полюсних наконечників 2 і розміщеного всередині сердечника 3 в
повітряному зазорі між ними існує радіальне магнітне поле з постійним значенням
магнітної індукції В. Між наконечниками і сердечником розміщується рухома
рамка 4 (катушка
з намотаним тонким провідником), що може вільно повертатися навколо сердечника
і переміщувати стрілку 6 відносно шкали. Спіральні пружини 5 створюють
протидіючий момент і втримують стрілку в нульовому положенні. .
Коли по рамці протікає
постійний струм І, на витки її обмотки діють сили, що створюють обертовий
момент Моб=![]() , під дією якого рухома частина вимірювача обертається,
закручує протидіючі пружини, створюючи протидіючий момент Мпр=-аW.
При рівності цих моментів рухома частина зупиняється. Кут повороту рамки (і
відповідно стрілки приладу) буде пропорційний до вимірювального струму (прилад
має рівномірну шкалу).
, під дією якого рухома частина вимірювача обертається,
закручує протидіючі пружини, створюючи протидіючий момент Мпр=-аW.
При рівності цих моментів рухома частина зупиняється. Кут повороту рамки (і
відповідно стрілки приладу) буде пропорційний до вимірювального струму (прилад
має рівномірну шкалу).
![]()
В – магнітна індукція, s –
активна площа рамки, w – число витків рамки,
W– питомий протидіючий момент пружин, I – струм, S – чутливість
механізму до струму.
При зміні
напряму струму змінюється
напрям обертового моменту, і
відповідно відхилення стрілки. Тому для
вимірювань струму різної
полярності використовують прилади, що мають нульову відмітку на
середині шкали. Для вимірювань в колах змінного струму потрібне попереднє
перетворення змінного струму в постійний.
![]()

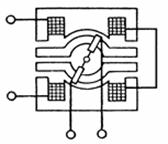
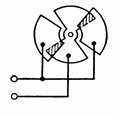
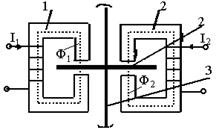
Рис
1.9. Будова МЕ логометричного механізму
В магнітоелектричних логометрах протидіючий момент створюється не
механічно (пружиною) а електричним способом. Рухома частина виконана у вигляді
двох з’єднаних рамок, по обмотках яких протікають струми І1 І2, які створюють
моменти М1 М2, що діють назустріч один одному для встановлення рівноваги. Тоді
а=f(І1 І2). Тобто логометр вимірює відношення струмів, що часто використовують
для вимірювання опору (омметри).
Отже, прилади
магнітоелектричної системи використовуються для вимірювань в колах постійного
струму (амперметри, вольтметри, гальванометри), мають рівномірну шкалу, високу
чутливість, точність (клас точності до 0,05), непридатні для вимірювання
змінного струму.
Гальванометр –
високочутливий прилад, що може вловлювати малі зміни фізичної величини (струму
чи напруги). В магнітоелектричного гальванометра чутливість підвищують за
рахунок значного зменшення питомого протидіючого моменту W, для чого рухому
частину (рамку приладу) встановлюють на розтяжках або підвісці з тонкого дроту,
одночасно використовують постійні магніти з найбільшою магнітною індукцією.
Застосовують для вимірювання дуже малих напруг і струмів,
в якості нуль-індикаторів (вказівник відсутності струму в колі).
2. Електромагнітні прилади
В
електромагнітних вимірювальних механізмах для створення обертового моменту
використовується дія магнітного поля котушки із струмом на рухливу феромагнітну
(частіше пермоллоєву) пластинку. Частіше використовують електромагнітні
вимірювальні механізми з прямокутними і круглими котушками.
При
проходженні струму I по намагнічувальній котушці 1 створюється магнітне поле.
Феромагнітний сердечник 2, закріплений на осі 3, при цьому прагне розташуватися
в місці з найбільшою напруженістю поля, тобто втягується в зазор котушки. З
віссю 3 зв'язана стрілка 4, яка переміщується за шкалою 5 і закручує протидіючу
пружину 4. Для швидкого заспокоєння руху рухливої частини застосовують
повітряні заспокоювачі 6.
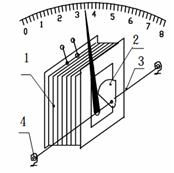
Pиc.1.10. Електромагнітний вимірювальний механізм: а) з
плоскою котушкою, б) з круглою;
1 – котушка, 2
– сердечник, 3 – вісь, 4 – пружина, 5 – сталева пластинка, 6– заспокоювач, 7–
стрілка
Електромагнітна
енергія, що створюється котушкою із струмом, визначається таким чином:
We = LІ2/2,
де L - індуктивність котушки 1, що залежить від положення сердечника 2.
Обертовий
момент: ![]()
Врахувавши
протидіючий момент, створений за допомогою пружин отримаємо рівняння
перетворення електромагнітного приладу: ![]() .
.
З виразу бачимо, що кут відхилення рухомої
частини електромагнітного механізму не залежить від напряму струму, і вони
можуть використовуватися в ланцюгах постійного і змінного струму. У ланцюзі
змінного струму кут відхилення рухливої частини ВМ залежить від квадрата
значення діючого струму.
Найпростіше
реалізуються однoграничні електромагнітні амперметри і міліамперметри.
Електромагнітний
логометр містить дві котушки і два феромагнітних сердечника, укріплених на
одній осі. Конструкція виконана так, що при протіканні струмів I1 і I2 по
котушках рух одного з сердечників збільшує індуктивність відповідної котушки, а
другого - зменшує. Це приводить до того, що обертові моменти будуть направлені
в протилежні сторони. Рівняння перетворення електромагнітного логометричного
вимірювального механізму можна записати: ![]() .
.
Електромагнітні
логометри застосовуються у фазометрах, фарадомерах, частотомірах.
Переваги:
1)використання як на постійному, так і на змінному струмі; 2) простоту
конструкції і дешевизну; 3) надійність в експлуатації; 4) широкий діапазон меж
вимірювання; 5) здатність витримувати великі перевантаження .
Недоліки: 1)
велике споживання енергії; 2) мала чутливість; 3) сильний вплив зовнішніх
магнітних полів; 4) нерівномірність шкали. (практично рівномірну шкалу,
починаючи з 20-25 % верхньої межі вимірюваної величини можна отримати змінюючи
форму сердечника і його розташування в котушці).
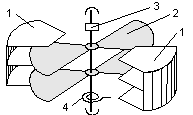
3. Електродинамічні прилади.
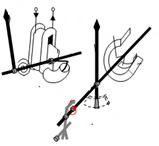
Рис
1.11. Будова ЕД механізму
Принцип
дії електродинамічного вимірювального механізму заснований на взаємодії
магнітних полів двох систем провідників із струмом.
Пристрій
електродинамічного вимірювального механізму, складається з рухомої 1 і
нерухомої 2 котушок (рамок, круглі або прямокутні котушки). Зазвичай нерухома
котушка складається з двох однакових частин, розділених повітряним зазором.
Обертальний момент виникає при взаємодії магнітного поля, що створюється
струмом I1, в котушці 1, і магнітним полем, створеним струмом І2, що проходить
через котушки збудження 2. Електромагнітна енергія We
двох контурів із струмами:
We= L1 I12
/2 + L2 I22 /2 + I1 I2M1,2
де L1,
L2 - індуктивність рухливої і нерухомої котушок; M1,2 - взаємна індуктивність
котушок.
Оскільки
індуктивність котушок не залежить від кута повороту, тому обертаючий момент, що
діє на рухливу котушку 1 =: MВР = I1I2 (dM1,2/da).
При механічному
створенні протидіючого моменту кут відхилення рухомої рамки може бути
визначений по формулі: a = I1I2
(dM1,2/da)/W
При включенні електродинамічного механізму
в ланцюг змінного струму кут відхилення:
a = I1I2
cosy (dM1,2/da)/W де I1 і I2 - значення
діючих струмів, що діють; ψ - кут зсуву фаз між векторами струмів I1 і I2
.
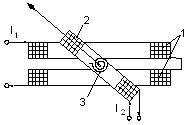
У
електродинамічних логометричних ВМ рухома частина складається з двох жорстко
закріплених між собою під певним кутом γ котушок. Кут відхилення α
залежить від відношення струмів I1/I2.
Електродинамічні
прилади застосовують в якості: ватметрів постійного струму і однофазних,
трифазних, малокосинусних
ватметрів змінного струму, амперметрів і вольтметрів змінного і постійного
струмів. Електродинамічні логометричні механізми застосовуються у фазометрах,
частотомірах, фарадомерах. Випускаються
комбіновані прилади - ампервольтваттметри.
Найбільш
важливою группою
електродинамічних приладів є ватметри.
При вимірюванні потужності в колах постійного струму нерухому катушку
ЕД приладу вмикають послідовно з навантаженням (на струм мережі). Послідовно з катушкою
напруги вмикають додатковий опір Rд, оскільки сама
катушка
розрахована на малий струм. Значення струму в катушці
І2 визначається ![]() ,
, ![]() - опір рухомої катушки.
Оскільки величини Rд
і
- опір рухомої катушки.
Оскільки величини Rд
і ![]() постійні, то струм І2
залежить лише від значення напруги
постійні, то струм І2
залежить лише від значення напруги ![]() , а кут відхилення стрілки приладу від потужності:
, а кут відхилення стрілки приладу від потужності: ![]() , де
, де ![]() - чутливість ватметра
по потужності. З виразу видно, що шкала ватметрів рівномірна.
- чутливість ватметра
по потужності. З виразу видно, що шкала ватметрів рівномірна.
Початки катушок напруги і
струму підєднані
до загального затискача мережі, тому між ними необхідно встановити перемичку.
Початки котушок на схемах позначають *.

Рис
1.12. Схема вмикання і векторна діаграма ватметра
При вимірюванні активної потужності в колах
однофазного змінного струму струм навантаження відстає від напруги на кут
φ. Тому кут відхилення стрілки ![]() .
.
Переваги:
можливість використання в колах постійного і змінного струмів; можливість
градуювання на постійному струмі; висока стабільність показів в часі; високий
клас точності (наприклад, випускаються електродинамічні амперметри і
міліамперметри, вольтметри, однофазні ватметри класу точності 0,05, частотоміри
- класу 0,5). Висока точність приладів обумовлена відсутністю в них, на відміну
від інших електромеханічних приладів, феромагнітних елементів.
Недоліки:
вплив зовнішніх магнітних полів і механічних дій; Шкала приладів нерівномірна.
Характер шкали залежить від форми котушок і їх взаємного розташування. велика
потужність споживання. По чутливості електродинамічні прилади поступаються
магнітоелектричним.
4. Феродинамічні прилади
Рис
1.13. Будова ФД механізму
Принцип
дії феродинамічного вимірювального механізму полягає у взаємодії магнітних
полів двох систем провідників із струмами, і по суті є різновидом
електродинамічного механізму. Відмінність полягає в тому, що для збільшення
чутливості нерухома котушка має магнітопровід з магнітно-м'якого матеріалу.
Наявність
сердечника 1 значно збільшує магнітне поле нерухомої котушки 2. Рухома котушка
3 переміщується в повітряному зазорі і переміщує стрілку 4 за шкалою 5.
Оскільки в повітряному зазорі, де розміщується рухома котушка 3 магнітне поле
рівномірне і радіальне, то обертальний момент:
МВР
= kI1I2cosy, де к
- коефіцієнт, що визначається конструктивними параметрами і матеріалом магнітопровода
1.
Рівняння
перетворення феродинамічного приладу має вигляд a =
(k/W) I1.I2 cosy.
Феродинамічні
вимірювальні механізми застосовуються в амперметрах, вольтметрах, ватметрах, частотомірах
і фазометрах. Феродинамічні прилади випускаються класів точності не вище 0,2;
0,5.
Переваги:
Мають більший обертовий момент, можливість використання при постійному і
змінному струмах; малий вплив зовнішніх магнітних полів; стабільність параметрів
при механічних впливах; менше, ніж в електродинамічних, споживання потужності,
велика чутливість.
Недоліки:
невисока точність, вплив змін частоти вхідного сигналу, вплив температури на
кут відхилення рухомої частини.
5. Електростатичні прилади.
Рис
1.14. Будова ЕС механізму
В
основі електростатичного приладу лежить система рухомих і нерухомих електродів,
що створюють електричну ємність. Обертальний момент виникає в результаті
взаємодії двох систем заряджених провідників, одна з яких є рухомою,
переміщення рухомої частини приводить до зміни ємності системи.
Практичне
застосування мають два види вимірювальних механізмів: у першому змінюється
активна площа електродів (дана конструкція застосовується в основному у
вольтметрах на низьку напругу), у другому - відстань між електродами (ця
конструкція використовується в кіловольтметрах).
На рис
показаний механізм із зміною активної площі електродів. Нерухома частина ВМ
складається з однієї або більше камер 1, в повітряні зазори яких вільно входять
тонкі пластини 2 рухомої частини, пластини закріплені на осі 3 разом із
стрілкою 4. При підключенні напруги до електродів 1 і 2 під дією
електростатичних сил, рухомі пластини 2 втягуються в повітряні зазори камер 1.
При цьому стрілка переміщується шкалою.
З
рівності обертаючого і протидіючого моментів рівняння перетворення
електростатичного вимірювального механізму:
МВР=
(U2/2) (dC/da). a = [U2/
(2W)](dC/da),
де С - ємність між пластинами; U - вимірювана напруга,
кут відхилення рухомої частини не залежить від полярності прикладеної напруги і
пропорційний квадрату значення діючої напруги.
ВМ ЕС
використовують для вимірювання напруги, потужності, опору, індуктивності та
інших величин. Переваги: 1) мале
споживання потужності, що пояснюється малими струмами витоку і і
малими діелектричними втратами в ізоляції, малою ємкістю вимірювального
механізму; 2) великий діапазон вимірюваної напруги; 3) можливість вимірювання
як на постійному, так і на змінному струмі; 4) незалежність показів від частоти
і форми вимірюваної напруги та від зовнішніх магнітних полів. Недоліки: 1) мала чутливість по напрузі; 2)
вплив зовнішніх електростатичних полів, що вимагає екранування вимірювального
механізму; 3) нерівномірна шкала (при відповідному виборі форми рухомих і
нерухомих електродів можна отримати практично рівномірну шкалу на ділянці від
15-25 % до 100 % від її номінального значення)
6. Індукційні ВМ
Принцип
дії індукційних вимірювальних механізмів полягає у взаємодії змінного
магнітного поля провідника струму і індукованих цим полем вихрових струмів в
рухливому елементі.
Конструктивно
індукційний вимірювальний механізм складається з одного або декількох
електромагнітів і рухомої частини, яка зазвичай виконується у вигляді алюмінієвого
диска, укріпленого на осі. Повинно бути не менше двох змінних магнітних потоків
що перетинають диск і зсунутих в просторі і по фазі.
Рис
1.8. Будова індукційного вимірювального механізму
Для двохпотокового
приладу струми I1 і I2, що протікають по обмоткам електромагнітів 1 і 2,
збуджують в сердечниках магнітні потоки Ф1 і Ф2. Ці потоки, пронизуючи диск 2,
наводять в ньому вихрові струми. Взаємодія потоків із струмами в диску створює
обертальний момент середнє значення якого може бути визначене як МВР
= СfФ1Ф2siny , де C
- коефіцієнт, залежний від матеріалів і конструкції вимірювального механізму; f
- частота зміни потоків; ψ - кут зсуву фаз між потоками.
Індукційні
механізми в основному використовуються в лічильниках електричної енергії.
![]()
![]()