15. ЦИФРОВІ ЗАСОБИ ВИМІРЮВАЛЬНОЇ
ТЕХНІКИ
Цифрові вимірювальні прилади
(ЦВП) здійснюють автоматичне перетворення вхідної вимірюваної величини вцифровий код. Покази ЦВП представлені в цифровій формі, що
усуває похибку відліку наявну в АВП. Для
цього в ЦВП виконуються операції квантування вимірюваної величини по рівню,
дискретизація її за часом і кодування (рис.1).
Вони широко застосовуються для
вимірювання частоти, інтервалів часу, напруги тощо. До переваг можна віднести:
широкий діапазон вимірюваних величин з високою точністю вимірювання, висока
швидкодія за рахунок відсутності рухомих електромеханічних елементів,
можливість представлення результатів вимірювання в цифровому виді з можливість
подальшого збереження і обробки.
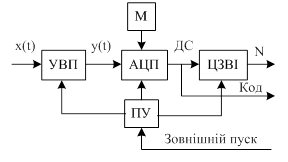
Рис. 1. Узагальнена структура ЦВП
Вимірювана
аналогова величина x(t) поступає на уніфікуючий
вимірювальний перетворювач (УВП), що містить дільники, підсилювачі, випрямлячі,
фільтри, перетворювачі лінеаризації і тому подібне. Нормалізований аналоговий
сигнал y(t) поступає на вхід аналого-цифрового перетворювача (АЦП), який
виконує операції квантування по рівню і за часом x(t), порівняння x(t) з мірою
M і кодування результатів. При цьому на виході формується дискретний сигнал ДС,
який перетворюється в цифровому засобі відображення інформації (ЦЗВІ) в
цифровий відлік N або у вигляді коду передається на ЕОМ. Пристрій управління
(ПУ) реалізує необхідний алгоритм вимірюванння.
З метою
уніфікації елементної бази та забезпечення
зручності в користуванні, фізичним носієм вимірювальної інформації у них
найчастіше є напруга постійного струму.
За
функціональним призначенням ЦЗВТ розділяються
на:
-
аналого-цифрові перетворювачі (АЦП),
-
цифро-аналогові перетворювачі (ЦАП),
- цифрові
вимірювальні прилади та цифрові вимірювальні системи.
В АЦП здійснюються три базові операції над вхідною величиною: її часова дискретизація,
квантування за рівнем і кодування отриманих квантованих значень.
ЦАП призначені для
зворотного перетворення кодових сигналів в пропорційні аналогові (напругу, струм, кут, тощо). АЦП і ЦАП серійно виготовляються у вигляді інтегральних
мікросхем
Дискретизація сигналу
означає заміну неперервної в часі величини на сукупність її окремих значень,
взятих в певні моменти часу tі. При цьому
проміжні значення вхідного сигналу між мітками
часу tі і
tі+1(інтервал дискретизації) втрачаються, тому з’являється похибка
дискретизації сигналу. Крім того, похибка яка залежить від часу,
який затрачається на аналого-цифрове перетворення сигналу, і залежить з’являється від методу
перетворення та швидкодії елементної бази АЦП.
Квантування полягає у
заміні неперервних значень сигналу певної інтенсивності (рівня) квантованими (дозволеними) значеннями - подібно як при
заокругленні чисел.
![]()
q - крок
квантування (різниця між сусідніми рівнями квантування).
Nq — квантовий (дозволений) рівень, до якого заокруглюється
значення вимірюваної величини; Цифровий
результат містить похибку заокруглення - це різниця між заокругленим результатом вимірювання та
справжнім значенням вимірюваної величини, яку називають похибкою квантування, яка не
перевищує половини кроку квантування.
.
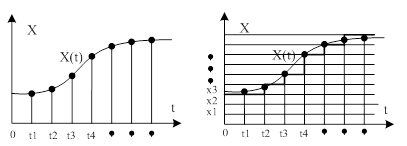
Дискретизація
в часі та квантування за рівнем вимірюваної величини
Потім квантований
сигнал, кодується, тобто подається
цифровим сигналом, двома різними рівнями
сигналу (0 і 1) в вибраній системі числення
Кожен
результат вимірювання зображується певною кількістю кодових символів.
Одиничний
нормальний (число-імпульсний) код - значення числа подається кількістю
імпульсів.
Одиничний позиційний код ~
значення числа подається положенням одиниці серед
нулів.
Десятковий
код (основою є число 10) - значення числа подається у десятковій системі числення цифрами від 0 до 9 з вагами,
пропорційними 10 у відповідному степені.
Двійковий нормальний код, значення числа подається у вигляді
послідовності цифр 0 чи1, при цьому вага цифри вчислі
відповідає два в степені, що дорівнює номеру розряду.
Двійково-десятковий
код - кожна цифра (розряд) десяткового числа подається двійковим кодом (використовується 4 двійкові розряди - тетрада, а кількість тетрад дорівнює
кількості десяткових розрядів числа).
Крім
двійкового нормального, використовуються також двійковий інверсний, доповняльний
та інші види кодів. Двійково-десяткові коди у межах тетради можуть мати і не тільки
двійкові ваги 8421, а й інші, наприклад, 4221, 2421, 5211 тощо. Використовуються також коди Грея,
Джонсона, вісімковий та шістнадцятковий.
Цифрові вимірювальні прилади (ЦВП) автоматично видають числове значення вимірюваної
величини на цифровому відліковому пристрої (цифровий індикатор, табло,
дисплей тощо).
В сучасних
ЦВП додатково здійснюються операції корекції похибок,
лінеаризації загальної функції
перетворення, цифрової фільтрація та усереднення тощо.
Цифровими вимірювальними системами (ЦВС) називають сукупність вимірювальних каналів, вимірювальних пристроїв та інших
технічних засобів, об'єднаних для створення
та аналізу сигналів цифрової вимірювальної інформації про декілька одно чи
різнорідних вимірюваних величин та інших видів інформації. Залежно від
призначення вимірювальних систем розрізняють інформаційно-вимірювальні, контрольно-вимірювальні та діагностично-вимірювальні системи. Завданням інформаційно-вимірювальної системи є
визначення розмірів вимірюваних величин - параметрів досліджуваного
об'єкта, тобто кількісного оцінювання процесів, що відбуваються в об'єкті. Такі
системи переважно використовують в наукових дослідженнях.
Вимірювальний канал -
це сукупність засобів вимірювальної техніки, засобів зв'язку та інших технічних засобів, призначених для
створення сигналу вимірювальної інформації про одну вимірювану величину, Як
правило вимірювальний канал є складовою частиною вимірювальної
системи.
Інтерфейс — це
сукупність технічних і програмних засобів, а також правил (протоколів) для здійснення одно- або ж двостороннього
обміну інформації між цифровими засобами. Через інтерфейс, як правило,
забезпечується зв'язок із зовнішніми цифровими пристроями – ЕОМ, принтер,
пам'ять, тощо.
У вимірювальній
техніці широко використовуються як універсальні інтерфейси
(паралельні та послідовні), так і спеціальні інтерфейси для вимірювальних ЗВТ - так звані приладні
інтерфейси. Інтерфейс виконує в цифровій
системі такі основні функції: синхронізація обміну інформацією, дешифрування адреси пристроїв вводу-виводу інформації,
узгодження формату слів, дешифрування
коду команд звертання до пристроїв пам'яті або пристроїв введення-виведення, електричне узгодження сигналів.
Хоча загалом передача
інформації здійснюється послідовно у часі, однак така передача може
відбуватися посимвольно, біт за бітом, або
послідовно, наприклад, байт за байтом. У першому
випадку маємо справу з послідовним інтерфейсом, з використанням двопровідної лінії передачі. У другому випадку для передачі слова
використовують багатопровідну лінію (для передачі одного байта
- 8 бітів необхідно що найменше 9 ліній) при
цьому організацію передачі здійснює паралельний інтерфейс. Очевидно, що завдяки паралельній передачі (наприклад, восьми бітів),
швидкість обміну інформації у паралельному
інтерфейсі набагато вища, ніж у послідовному.
Приклади
широковживаних послідовних інтерфейсів є універсальні стандартні інтерфейси RS232, RS485, в яких забезпечується повний
дуплексний (двонаправлений) режим обміну інформацією, виявляються фальстартові
посилки, перевіряється наявність помилок
тощо. Довжина ліній зв'язку для інтерфейсу RS48S може сягати 1200 м.
Поширеними прикладом
універсального паралельного інтерфейсу (а точніше
послідовно-паралельний) є стандартний інтерфейс НРІВ (Hewlett-Packard
Interface Bus),
Крім
цього, в багатьох сучасних ЦВП передбачений аналоговий вихідний сигнал, здебільшого, у вигляді стандартних
уніфікованих сигналів постійного струму або
напруги постійного струму для використання в системах керування технологічними
процесами, для передачі на значні відстані, для здійснення аналогового відображення і/або реєстрації вимірювальної інформації.
Цифро-аналогові перетворювачі (ЦАП) призначені для перетворення
коду керування в напругу або струм. Використовуються ЦАП як вузли зворотного зв'язку
АЦП та для формування вихідних сигналів цифрових вимірювальних і обчислювальних пристроїв.
Для
перетворення двійкового коду в аналоговий сигнал зазвичай формуються струми, пропорційні до ваг розрядів коду, і
потім підсумовують ті із струмів, які відловідають ненульовим (одиничним) розрядам вхідного коду. Спрощена
структура ЦАП подана на рис2.
Опорна
напруга U0 ЦАП подається одночасно на
всі вагові резистори 2°R 21R....
2 n-2 R., 2 n-1 R,
виводи яких під'єднані до перемикача
струмів ПС. Один вихід перемикача струмів сполучений із спільною шиною, в той час як інший - до входу перетворювача
струму на напругу (ОП та резистор
зворотного зв'язку Rзз). Завдяки такому включенню незалежно від поданого
коду керування через і-й ваговий
резистор завжди протікає струм Іі=U0/2iR,
який за наявності одиниці в і-му розряді вхідного коду N замикається
через резистор Rзз, а в протилежному
випадку стікає на спільну шину. Вихідна напруга ЦАП визначається як спад
напруги на резисторі R33 від суми струмів Іі,
![]()
де аі - комутаційний коефіцієнт (а, = 1, якщо в і-тому
розряді вхідного коду N є одиниця і а =
0 - у протилежному випадку); N, Nmax -
відповідно, вхідний код керування та його максимальне значення.
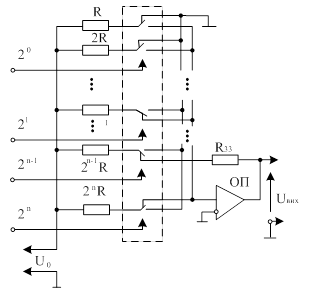
Рис 2.
Методи
підвищення точності вимірювань
Одним з найбільш радикальних
шляхів підвищення точності вимірювань за інших рівних умов є використання
точніших засобів вимірювання. Поява і розвиток мікроелектронної техніки і
мікропроцесорів, що забезпечують можливість практично повної автоматизації
найскладніших вимірювальних процесів, дозволила значно збільшити точність
вимірювань. Разом з цим застосовується ряд традиційних методів, класифікація
яких приведена на рис.3.
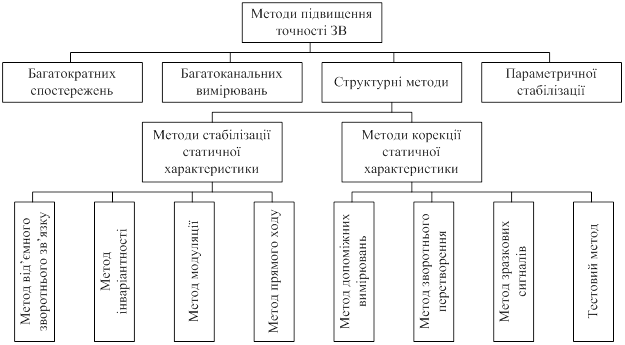
Рис. 3 Класифікація методів підвищення точності ЗВТ
Метод багатократних
спостережень використовується для зменшення випадкової складової похибки і
полягає в тому, що : за деякий постійний інтервал часу, відведений для
вимірювання, виконують декілька спостережень, потім за допомогою
обчислювального пристрою, що входить до складу даного засобу, обчислюють
середнє арифметичне значення вимірюваної величини і оцінку
середньоквадратичного відхилення результату вимірювання.
Метод багатоканальних
вимірювань аналогічний попередньому. Засоби вимірювання, за допомогою яких
реалізується цей метод, містять декілька ідентичних за характеристиками
паралельних вимірювальних ланцюгів (каналів) і обчислювальний пристрій.
Останній, отримуючи вимірювальну інформацію по цих каналах, обчислює середнє
арифметичне значення вимірюваної величини і оцінку середньоквадратичного
відхилення результату виміру. Такий метод дозволяє зменшити випадкову складову
похибки засобу.
Метод параметричної
стабілізації, або конструктивно-технологічний,
полягає в стабілізації статичної характеристики ЗВТ. Параметрична стабілізація
реалізується шляхом виготовлення засобів вимірювання з точних і стабільних
елементів, параметри яких мало схильні до зовнішніх впливів; термостабілізації; стабілізації параметрів живлення;
екранування приладів від магнітних і електричних полів і т. п. Цей метод
зменшує систематичну і випадкову похибки.
Структурні методи засновані на
тому, що до складу засобів вимірювання включаються додаткові вузли і елементи,
що забезпечують підвищення точності цих засобів за рахунок інформації,
отриманої з їх допомогою. Структурні методи підвищення точності подіділяють на методи, що забезпечують стабілізацію
статичної характеристики засобу вимірювання, і методи, засновані на корекції
цієї характеристики.
Метод від’ємного зворотного
зв'язку реалізується тільки за наявності перетворювальних елементів або
перетворювачів, здатних здійснювати перетворення вихідного сигналу засобу
вимірювання у вхідний (зворотний перетворювач). Створення таких перетворювачів
- часто складне технічне завдання. Застосування цього методу забезпечує
зменшення мультиплікативної похибки і похибки нелінійності,
а відносна адитивна похибка при цьому не змінюється. В той же час використання
методу призводить до зменшення чутливості засобу.
Метод інваріантності полягає в
тому, що в засобі вимірювання окрім вимірювального кола (каналу) є порівняльне
коло (канал), до якого не подається вхідний сигнал, а деякоа
величина, зв’язана з вимірюваною. Причому параметри порівняльного кола
підібрані так, що зміна його сигналу під дією впливаючої
величини ідентична зміні сигналу вимірювального ланцюга під дією цієї ж
величини, тобто збурення, викликані вимірюваною величиною, поступають в
вимірювальний засіб по двох каналах (принцип двоканальності).
Використання різниці сигналів вимірювального і порівняльного кола (при
диференційному включенні цих кіл) забезпечує незалежність (інваріантність)
результуючого сигналу від вимірюваної величини, тобто метод забезпечує
виключення додаткової похибки, викликаної змінами умов вимірювання.
Метод модуляції полягає в тому,
що сигнал, що поступає на вхід ЗВ, або параметри цього ЗВ піддаються примусовим
періодичним змінам (модуляції) з частотою, не співпадаючою (зазвичай вищою) з
областю частот вимірюваного сигналу. Використання методу модуляції дозволяє
зменшити похибки сил тертя, явищ поляризації і гістерезису.
Метод прямого ходу полягає в тому,
що вимірюваний сигнал поступає до чутливого елементу ЗВ через ключ, за
допомогою якого здійснюється періодичне в часі відключення вимірюваного сигналу
від чутливого елементу і подача до останнього сигналу, значення якого дорівнює
нулю. Це забезпечує роботу засобу на висхідній гілці (прямий хід) статичної
характеристики при усіх значеннях вимірюваного сигналу, що виключає найбільш
суттєву похибку багатьох засобів – похибку від варіації.
Метод допоміжних вимірювань
полягає в автоматизації процесу обліку додаткової похибки засобу вимірювань по
відомих функціях впливу ряду збурюючих величин. Для
цього здійснюється вимірювання значень цих величин і за допомогою
обчислювального пристрою, побудованого з обліком названих функцій впливу,
автоматично коригується вихідний сигнал засобу вимірювання.
Метод зворотного перетворення
(ітераційний метод) базується на використанні додатково у складі засобу
вимірювань окрім прямого вимірювального кола (прямого перетворювача), кола, що
здатне здійснювати зворотнє перетворення вихідного
сигналу (зворотний перетворювач), має істотно вищу точність, ніж коло прямого
перетворення. Результат вимірювання отримують шляхом ітерацій. В процесі кожної
ітерації послідовно здійснюються: пряме перетворення вимірюваної величини і
запам'ятовування результату, зворотне перетворення запам’ятованого
значення цієї величини, пряме перетворення сигналу зворотного перетворювача, що
відповідає запам’ятованому значенню вимірюваної
величини і порівняння результатів цих двох перетворень, на основі якого
формується коригуючий сигнал. Зворотний перетворювач в цьому методі грає роль
багатозначної міри, по якій коригується статична характеристика прямого
перетворювача. Метод зворотного перетворення дозволяє зменшувати адитивну і
мультиплікативну похибки.
Метод зразкових сигналів
(зразкових мір) полягає у визначенні в кожному циклі вимірювання реальної
функції перетворення засобу вимірювання за допомогою зразкових сигналів (мір),
тобто метод полягає в автоматичному градуюванні засобу в кожному циклі. Цикл включає
вимірювання фізичної величини, що поступає на вхід ЗВ, почергове вимірювання
однієї або декількох мір, що підключаються замість вимірюваної фізичної
величини на вхід засобу вимірювання, і розв’язок системи рівнянь за допомогою
обчислювального пристрою, з якого визначається значення вимірюваної фізичної
величини. У цьому рішенні вже враховані зміни реальної статичної
характеристики, тобто цей метод зводиться до сукупного вимірювання. Він
дозволяє зменшити адитивну і мультиплікативну похибки, а також похибку не
лінійності.
Тестовий метод зводиться до
проведення сукупних вимірювань. На відміну від методу зразкових сигналів в
тестовому методі в кожному циклі роботи приладу крім вимірювання фізичної
величини, що поступає на вхід ЗВТ, здійснюють вимірювання величин-тестів, кожна
з яких формується з міри і вимірюваної величини. Значення вимірюваної величини
визначається з системи рівнянь, що вирішується за допомогою обчислювального
пристрою. По суті цей метод є розвитком методу зразкових сигналів.
![]()
![]()