РОЗДІЛ 12.
ПРОЕКТУВАННЯ РЕЖИМУ РЕГУЛЮВАННЯ.
12.1.
Визначення груп руху
У процесі проектування або оцінки
ефективності регульованого перехрестя передбачається розглядати окремо один від
одного кожен з підходів до перехрестя, а також кожну з груп руху в рамках
одного підходу.
Таблиця 12.1.
Групи руху, що використовувались при
аналізі регульованого перехрестя.
|
Число смуг |
Рух за смугами |
Можливі групи руху |
|
|
1 |
Л + Пр + Л |
|
|
|
2 |
Л Пр +П
|
1 2 |
|
|
3 |
П + Пр |
2 |
|
|
4 |
Л Пр П + Пр |
2 3 |
|

Поділ усіх напрямків руху на групи руху
порівняно просте завдання, при вирішенні якого враховуються як геометричні
особливості регульованого перетину, так і розподіл транспортних потоків на
розглянутому перехресті. При формуванні груп руху можна керуватися наступними
положеннями:
-
виділена
лівоповоротна смуга (смуги) розглядається як окрема група руху; теж саме можна
віднести до виділеної правоповоротної смуги руху.
-
якщо на
підході до перехрестя є виділена право- або лівоповоротня смуга (або обидві),
всі інші смуги, як правило, об'єднуються в одну групу руху.
Якщо дві або більше смуг руху
об'єднуються в одну групу смуг руху при аналізі регульованого перетину, в усіх
наступних розрахунках ці смуги розглядаються як єдине ціле.
12.2.
Формування системи фаз регулювання
Кількість
фаз регулювання та система їх розподілу впливає на ефективність роботи
регульованого перетину і на безпеку руху на ньому.
На регульованому перетині всі потоки
можна розділити на конфліктні та безконфліктні потоки. При цьому під
безконфліктними потоками розуміються
такі, які при конкретних геометричних характеристиках регулюючого перетину при одночасному русі не
перетинаються.
Конфліктні
потоки в свою чергу можна розділити на допустимі і неприпустимі конфліктні
потоки. Основні допустимі види конфліктів транспортних потоків на регульованому
перетині представлені на рис. 3.2.
Кількість фаз регулювання залежить від
геометричних особливостей перетину, а також від кількості транспортних потоків
(груп руху) їх напрямків і наявності конфліктів при їх одночасному русі
(наявність конфліктних точок).
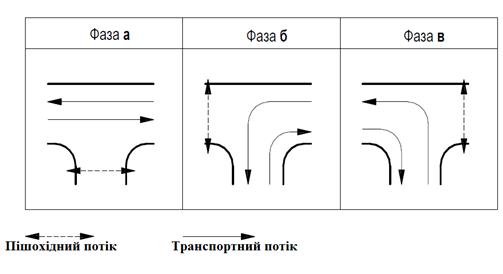
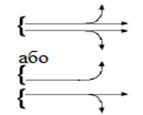
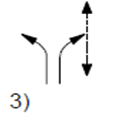
Наприклад, часто в разі слабкого
лівоповоротного потоку його рух допускається одночасно з протилежним прямо
направленим потоком,як
це показано на рис. 12.1 (а). У разі ж значного лівоповоротного потоку його
виділяють в окрему фазу регулювання (вплив інтенсивності потоку), що в свою
чергу є неможливим за відсутності виділеної лівоповоротної смуги руху (вплив
геометричних особливостей перехрестя). У будь-якому випадку кількість фаз
регулювання повинна бути за можливістю меншою (дві-чотири). Приклад формування
системи фаз регулювання представлені в таблиці 12.2.
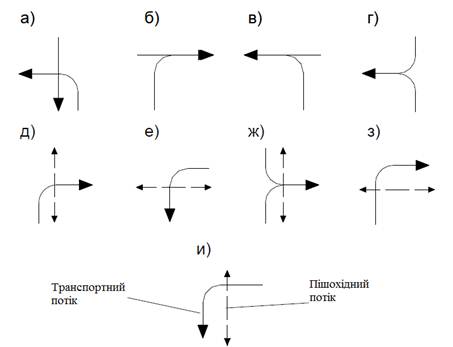
Рис.12.1. Основні теоретично можливі
схеми конфліктів на світлофорному
об'єкті
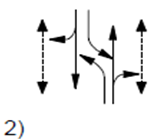
Таблиця 12.2.
Система фаз регулювання.
|
|
Схема фаз регулювання |
Опис |
|||
|
а |
|
|
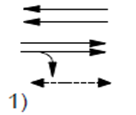
Дві фази. Потік вліво в конфлікті з
протилежним прямо направленим потоком(просочування). Застосовується на
невеликих перетинах з низькою інтенсивністю лівоповоротних потоків. |
||
|
б |
|
|
|
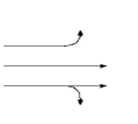
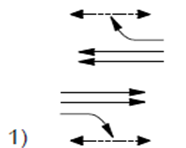
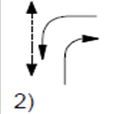
Раннє
відсічення.
Забезпечує додатковий час для лівоповоротного потоку на підході «на захід» |
|



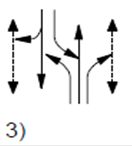
Продовження
таблиці 12.2
|
в |
|
|
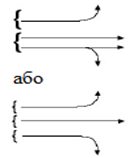
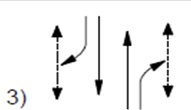
Чотири фази. Рух лівоповоротних потоків
організовано в окремій фазі. Застосовується на великих пересіченнях. |
||
|
|
|
||||
|
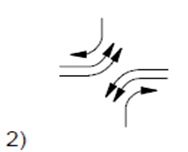
Г |
|
|
|
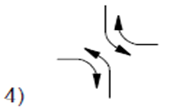
Три фази на Т –
подібному перетині. При слабкому потоці наліво з підходу «на захід» можна також
застосувати «Раннє відсічення» та «просочування» |
|
![]() - пішохідний потік
- пішохідний потік
![]() - транспортний потік
- транспортний потік
У табл. 12.2 (а) показаний приклад
простої двофазної системи регулювання. В
деяких випадках, наприклад, коли протилежний потік, конфліктуючих з розглянутим
потоком, є нижче за інтенсивністю, його можна зупиняти раніше розглянутого
потоку або дозволяти рух потоку, що розглядався раніше протилежного руху з
метою забезпечення додаткової пропускної здатності розглянутого лівоповоротного
потоку (табл. 12.2 (б).
У випадках, коли лівоповоротні потоки
занадто великі і їх рух повинен здійснюватися безконфліктно або коли для
поворотних потоків виділено по декілька смуг, слід застосовувати чотирьохфазну систему регулювання як показано в табл. 12.2
(в).
Для «Т» - подібних перетинань найчастіше
рекомендується застосовувати трифазну
систему регулювання, представлену в табл. 12.2 (г). У випадках, коли на
регульованому перетині має місце трамвайний рух, система фаз регулювання може
бути більш складною. Тут варто відзначити, що у російських посібниках допускається рух трамвая одночасно з
конфліктними автомобільними потоками. Зарубіжна ж практика показує, що
конфліктний рух трамвайних і транспортних потоків - явище небажане, щоб його уникнути і використовується більш
складна система фаз регулювання. Таким чином, якщо світлофорне регулювання з
системою фаз (табл.12.2 а) можна характеризувати як «пофазне
регулювання», то при більш складній системі фаз (коли один рух
дозволяється, але в декількох фазах) його можна характеризувати як «регулювання
за напрямами».
12.3.
Перехідний інтервал
Під перехідним інтервалом розуміється
інтервал часу, протягом якого відбувається зміна дозволяючого сигналу для двох суміжних фаз
регулювання, тобто інтервал з моменту виключення зеленого сигналу для однієї
фази до моменту включення зеленого сигналу наступної фази регулювання.
Перехідний інтервал призначений для
забезпечення безпеки руху конфліктних потоків. Як правило, перехідний інтервал
складається з жовтого і повністю червоного інтервалу (повністю червоний
інтервал - за всіма напрямками діє червоний сигнал).
12.3.1.
Тривалість жовтого сигналу
Жовтий сигнал використовується для того,
щоб підготувати водія до зміни світлофорного сигналу з зеленого на червоний
сигнал і навпаки. В українській практиці частіше зустрічається використання
жовтого сигналу в якості проміжного між зеленим дозволяючим і червоним заборонним сигналом. При
цьому, згідно з правилами дорожнього руху (ПДР) після включення жовтого сигналу
водій повинен зупинити транспортний засіб перед стоп-лінією, за винятком
випадків, коли для зупинки водієві прийшлося б вдатися до екстреного
гальмування.
Сучасна практика показує, що поведінка
водія у разі появи жовтого сигналу для різних ситуацій неоднакова. Місцеві
особливості, різні тривалості жовтого сигналу, особливості правил дорожнього
руху в різних містах (країнах) впливають на ступінь використання водіями
жовтого сигналу для руху.
Розрахунок тривалості жовтого сигналу,
як правило, здійснюється за допомогою формули, заснованої на кінематичних
принципах ідеалізованого уповільнення
руху транспортного засобу. Тривалість жовтого сигналу, розрахована за цією
формулою забезпечує час, необхідний для реакції водія на зміну світлофорного
сигналу, а також час, необхідний для достатньо комфортабельної зупинки
транспортного засобу перед стоп-лінією для випадку умов руху, близьких до
ідеальних:
 ,
(12.1)
,
(12.1)
де ![]() - тривалість жовтого сигналу, с;
- тривалість жовтого сигналу, с; ![]() - час реакції водія на зміну світлофорного сигналу, с; v - швидкість, м/с; a - середнє уповільнення руху,м/с2; g - прискорення вільного
падіння, м/с2; G - середня величина ухилу
на підході в 50-метровій зоні від стоп лінії,%/100.
- час реакції водія на зміну світлофорного сигналу, с; v - швидкість, м/с; a - середнє уповільнення руху,м/с2; g - прискорення вільного
падіння, м/с2; G - середня величина ухилу
на підході в 50-метровій зоні від стоп лінії,%/100.
Деякі параметри формули (12.1)
варіюються залежно від регіону (країни). Так, наприклад, у м. Онтаріо (Канада)
застосовуються тривалості жовтого сигналу, представлені в табл. 12.3 [126].
У м. Онтаріо тривалість жовтого сигналу
визначається в залежності від середньої швидкості руху, в той час як у західній
Канаді у м. Едмонтоні
використовується залежність жовтого сигналу від максимально дозволеної
швидкості руху (табл. 12.3).
Результати досліджень, представлені у
спеціальному журналі «ITEJournal»
(ITE - Institute of traffic engineering,
перекладається як інститут транспортної інженерії) і враховують зміну величини
ухилу на перетині.
Таблиця 12.3
Тривалості жовтого сигналу
використовувані у м. Онтаріо (Канада) при відсутності ухилу на перетині
|
Середня швидкість руху на перехресті,
м/с |
Тривалість
жовтого сигналу,с |
|
25 |
3,0 |
|
30 |
3,2 |
|
35 |
3,4 |
|
40 |
3,6 |
|
45 |
3,8 |
|
50 |
4,1 |
|
60 |
4,5 |
|
70 |
5,0 |
|
80 |
5,4 |
|
90 |
5,9 |
Таблиця 12.4
Тривалості жовтого сигналу представлені в «ITE-Journal»
|
Величина
ухилу,% |
Швидкість
руху, км/год |
||||
|
50 |
60 |
70 |
80 |
90 |
|
|
Тривалість
жовтого сигналу, с |
|||||
|
0 |
3,28 |
3,74 |
4,20 |
4,91 |
5,11 |
|
Підйом |
|||||
|
+1 |
3,21 |
3,65 |
4,09 |
4,80 |
4,99 |
|
+2 |
3,15 |
3,58 |
4,01 |
4,68 |
4,86 |
|
+3 |
3,09 |
3,5 |
3,92 |
4,57 |
4,74 |
|
+4 |
3,02 |
3,43 |
3,83 |
4,47 |
4,64 |
|
Спуск
|
|||||
|
-1 |
3,30 |
3,74 |
4,29 |
5,05 |
5,25 |
|
-2 |
3,44 |
3,93 |
4,42 |
5,19 |
5,39 |
|
-3 |
3,53 |
4,04 |
4,54 |
5,33 |
5,55 |
|
-4 |
3,62 |
4,14 |
4,67 |
5,50 |
5,72 |
Таблиця 12.5
Тривалості жовтого сигналу
використовувані у Німеччині
|
Максимально
допустима швидкість руху, м/с |
Тривалість
жовтого сигналу, с |
|
50 |
3,0 |
|
60 |
4,0 |
|
70 |
5,0 |
Практика показує, що тривалість жовтого
сигналу не повинна перевищувати 5 (с), оскільки це сприяє більш агресивній
поведінці водіїв, може привести до перевищення водіями обмеження швидкості або
надмірного використання жовтого сигналу для руху.
Як порівняння приводимо значення жовтого
сигналу, прийняті в Німеччині в залежності від максимально допустимої швидкості
руху (табл.12.5).
Слід зазначити, що в російських умовах
частіше зустрічаються світлофорні з тривалістю жовтого сигналу, рівною 3 - 4 с.
12.3.2.
Повністю червоний інтервал
Під повністю червоним інтервалом
розуміється інтервал, в перебігу якого в
усіх напрямках руху діє червоний сигнал. Винятком є лише пішохідні чи
транспортні потоки, що не мають конфліктних точок з рухом. Повністю червоний
інтервал заповнює той проміжок часу, який має місце між закінченням жовтого
сигналу і початком зеленого сигналу в наступній (що починається) фазі і його
значення не може бути негативним. Так, наприклад, журнал «ITE-Journal» рекомендує мінімальне значення повністю червоного
інтервалу для фаз, протягом яких здійснюється прямо направлений рух, рівний 1 с. Визначення повністю
червоного інтервалу засноване на використанні формул (рис. 12.2):
![]() (12.2)
(12.2)
 (12.3)
(12.3)
де ![]() - повністю червоний інтервал, с; I - перехідний інтервал,
с; i - величина, що представляє період часу з моменту початку жовтого
сигналу до моменту проходження стоп-лінії останнім транспортним засобом; Wc - відстань від
стоп-лінії до найвіддаленішої точки конфліктної зони, м;
- повністю червоний інтервал, с; I - перехідний інтервал,
с; i - величина, що представляє період часу з моменту початку жовтого
сигналу до моменту проходження стоп-лінії останнім транспортним засобом; Wc - відстань від
стоп-лінії до найвіддаленішої точки конфліктної зони, м; ![]() - довжина автомобіля
(легкового автомобіля), що звільняє перехрестя, зазвичай приймається
- довжина автомобіля
(легкового автомобіля), що звільняє перехрестя, зазвичай приймається
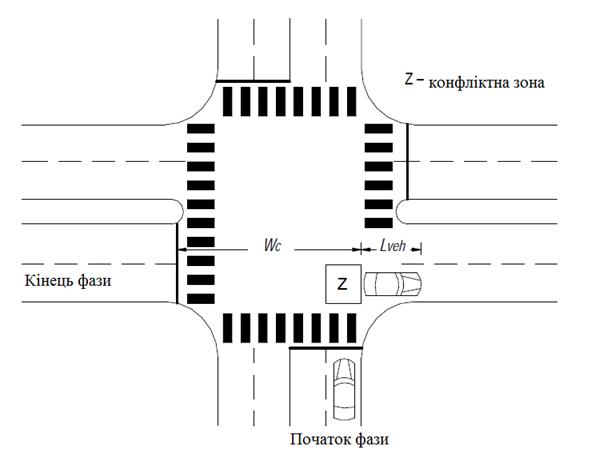
Рис.12.2. Визначення величини перехідного інтервалу
Величина i може прийматися рівною величині жовтого сигналу або бути коротшою
на 1 с в залежності від місцево-характерних умов руху.
У тих випадках, коли автомобільний потік
закінчує свій рух протягом перехідного інтервалу, а конфліктуючий з ним
пішохідний потік починає рух, використовується формула:
 (12.4)
(12.4)
де Wc - відстань від стоп-лінії
до найвіддаленішої точки конфліктної зони, м;
![]() - швидкість звільнення конфліктної зони останнім
автомобілем у черзі, м/ с.
- швидкість звільнення конфліктної зони останнім
автомобілем у черзі, м/ с.
12.3.3.
Визначення тимчасового інтервалу за німецькою методикою
Згідно з методикою, представленою
німецькими фахівцями по організації дорожнього руху, перехідний інтервал
складається з таких елементів (рис. 12.3):
![]() , (12.5)
, (12.5)
де ![]() - перехідний інтервал, с;
- перехідний інтервал, с; ![]() - час необхідний
останньому автомобілю в черзі для проходження відстані від стоп-лінії до
найвіддаленішої точки конфліктної зони, с;
- час необхідний
останньому автомобілю в черзі для проходження відстані від стоп-лінії до
найвіддаленішої точки конфліктної зони, с; ![]() - час, протягом якого жовтий сигнал використовується водіями для
руху (Ueberfahrzeit), с;
- час, протягом якого жовтий сигнал використовується водіями для
руху (Ueberfahrzeit), с; ![]() - час, необхідний першому автомобілю у фазі початку для
проходження відстані від стоп-лінії до найближчої точки конфліктної зони (Einfahrzeit – час в'їзду), с.
- час, необхідний першому автомобілю у фазі початку для
проходження відстані від стоп-лінії до найближчої точки конфліктної зони (Einfahrzeit – час в'їзду), с.
Окремі елементи формули (12.5) повинні
вибиратися таким чином, щоб забезпечити безпеку у разі зміни фаз регулювання.
При цьому більші значення перехідного інтервалу не означають забезпечення
високої безпеки руху.
Параметр ![]() для будь-яких
елементів регульованого перетину визначається за формулою:
для будь-яких
елементів регульованого перетину визначається за формулою:
 (12.6)
(12.6)
де ![]() - середня швидкість руху, м / с;
- середня швидкість руху, м / с; ![]() - яку долає відстань, м;
- яку долає відстань, м; ![]() - відстань від стоп-лінії до найвіддаленішої точки конфліктної
зони, м;
- відстань від стоп-лінії до найвіддаленішої точки конфліктної
зони, м; ![]() - довжина автомобіля, м.
- довжина автомобіля, м.
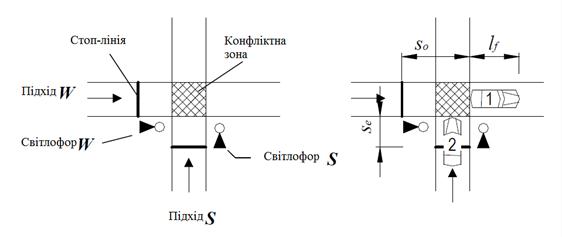
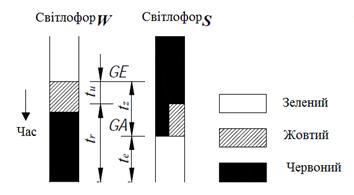
Рис.12.3 Визначення перехідного інтервалу
а) план перехрестя; б) зміна фаз
регулювання (автомобіль 1 звільняє
конфліктну зону, а 2 заїжджає на неї); в) визначення перехідного
інтервалу: GE – момент вимкнення
зеленого сигналу, GA –
момент
увімкнення зеленого сигналу.
При визначенні параметра ![]() також необхідно
проводити розрахунки для велосипедних потоків у випадках, коли такий рух
регулюється світлофором.
також необхідно
проводити розрахунки для велосипедних потоків у випадках, коли такий рух
регулюється світлофором.
При визначенні часу в'їзду (![]() ) необхідно враховувати з якої відстані автомобілі починають проходження відстані від
стоп-лінії до початкової точки конфліктної зони: зі стану спокою або вже
перебуваючи у русі. У разі, коли автомобілі вже перебували в русі, їм
необхідний менший час для досягнення конфліктної зони. Таке явище повинне
враховуватися у разі організації координованого руху світлофорного регулювання
(зелена хвиля). Час в'їзду можна визначити для руху зі стану спокою за
формулою:
) необхідно враховувати з якої відстані автомобілі починають проходження відстані від
стоп-лінії до початкової точки конфліктної зони: зі стану спокою або вже
перебуваючи у русі. У разі, коли автомобілі вже перебували в русі, їм
необхідний менший час для досягнення конфліктної зони. Таке явище повинне
враховуватися у разі організації координованого руху світлофорного регулювання
(зелена хвиля). Час в'їзду можна визначити для руху зі стану спокою за
формулою:
 . (12.7)
. (12.7)
І для тих, що вже перебували у русі:
 , (12.8)
, (12.8)
де a - прискорення, з яким автомобіль в'їжджає на
перехрестя, м / с2.
Відповідно до норм
проектування регульованих перетинів у Німеччині швидкість автомобілів, що
в'їжджають на перехрестя, які вже перебували в русі, приймається рівною 40 (км
/ год). При цьому застосування короткого інтервалу на
початку фази з включенням червоного і жовтого сигналу (не більше 2 с) значно
знижує виникнення ранніх стартів.
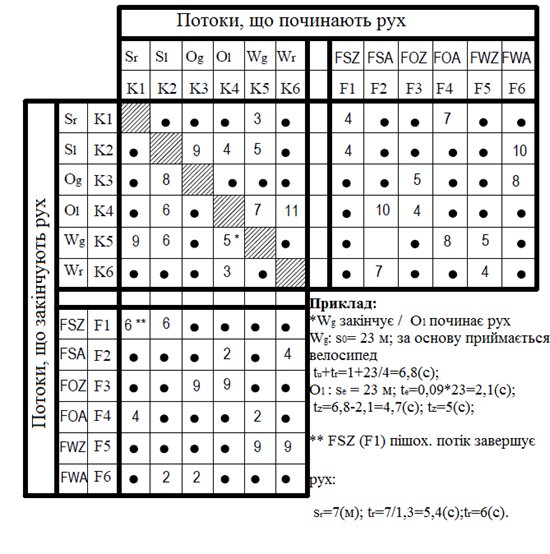
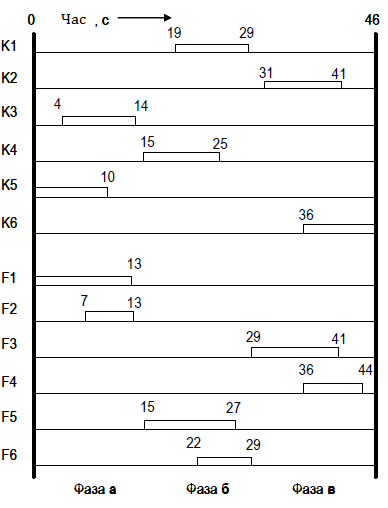
Розрахункові параметри,
використовувані при визначенні перехідного інтервалу можна також визначити із
спеціальної діаграми на рис. 12.4. або за даними в табл. 12.6.

Рис.12.4. Діаграма визначення перехідного інтервалу