Тема 8. Технологічні машини –
гексаподи
Технологічні машини – гексаподи. Мехатронний підхід покладений в
основу машин з концептуально новим принципом побудови – так званих гексапод. Ці
технологічні машини (верстати, координатно-вимірювальні машини, роботи) мають
стрижневу конструкцію і побудовані на мехатронних модулях лінійного руху, в
основі їх конструктивної схеми лежить платформа Стюарта.
Машина-гексапод
(рис. 8.1) виконана на базі шести ШВП 2 з відповідними датчиками
переміщення і високомоментними двигунами, що здійснюють осьове переміщення
гвинтів. Одним кінцем ШВП шарнірно сполучені з основою 1, а іншим – Х, Y, Z та ωz шарнірно з рухливою
верхньою платформою 4, на якій
розташований виконавчий орган – інструментальна головка 3. Інструментом можуть служити фрези, свердла, різці, шліфувальні
круги, вимірювальні наконечники. Програмно переміщаючи гвинти, можна управляти
положенням виконавчого органу : переміщати його у вертикальному і
горизонтальному напрямах, повертати в трьох площинах.
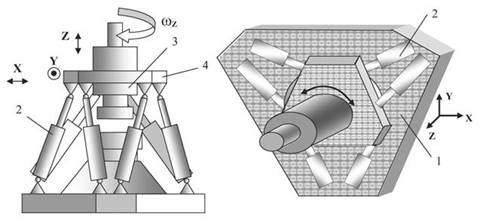
Рис.
9.3. Схема машини-гексапода
Основними
перевагами гексаподних машин є:
– скорочення часу
підготовки виробництва та підвищення його рентабельності за рахунок об'єднання
обробних, розмічальних і вимірювальних функцій в єдиній мехатронній системі;
– висока точність
вимірювань і обробки, яка забезпечується підвищеною жорсткістю стрижневих
механізмів (до 5 разів), застосуванням прецизійних датчиків зворотного зв'язку
і лазерних вимірювальних систем, використанням комп'ютерних методів корекції
(наприклад, теплових впливів);
– підвищена
швидкість рухів (швидкість швидких переміщень досягає
– відсутність
направляючих (в якості несучих елементів конструкції використовуються приводні
механізми), звідси поліпшені масогабаритні характеристики і матеріаломісткість;
– високий ступінь
уніфікації мехатронних вузлів, що забезпечує технологічність виготовлення і
збірки машини і конструктивну гнучкість;
– висока якість
управління рухом завдяки малій інерційності механізмів, застосуванню лінійних
мехатронних модулів руху як об'єктів управління, використання методів
автоматизованої підготовки та виконання в реальному часі керуючих програм,
наявності дружелюбного інтерфейсу «людина-машина».
Серед
українських науковців, які займаються питаннями розробок машин-гексаподів, це
НТУУ "КПІ" – завідувач кафедри конструювання верстатів та машин
д.т.н., проф. В.Б. Струтинський та доцент кафедри конструювання верстатів та
машин О.В. Литвин.
У 2003
р. в Росії був створений перший серійний верстат типу МПК – Гексамех-1 (Рис. 8.2).
Верстат призначений для обробки виробів складної просторової форми в
авіакосмічній, автомобільній, суднобудівельній промисловості. Типові
оброблювані вироби: балки, нервюри, лонжерони, панелі, ливарні і мастер-моделі,
оснащення.

Рис. 8.2. Загальний вигляд гексапода моделі Гексамех-1
За конструкцією
гексаподи бувають двох типів: координатно-вимірювальні машини (КВМ) і
технологічні модулі (ТМ) для механообробки.
Технологічні
модулі призначені для фасонної обробки з високою точністю виробів методами
фрезерування, шліфування, свердління, полірування, а також для виконання
операцій гравіювання, розточування, розмітки. Робоча зона гексапод-ТМ
варіюється у різних моделей в діапазонах: по осі X – від
Гексаподи мають
ефективні масогабаритні показники в порівнянні з верстатами традиційної
компоновки. Так, ТМ-500 при габаритах 1800x1550x2300 мм має масу
Контрольно-вимірювальні
машини виконують автоматичні вимірювання та контроль розмірів деталей (в тому
числі легкодеформуючих виробів) від конструкторських або технологічних баз.
Похибки вимірювань для КІМ-500 (машина базового виконання) не перевищують
Подальший розвиток
технологічних машин-гексапод пов'язане із застосуванням інтелектуальних
лінійних мехатронних модулів, а також зі створенням ефективного математичного
та програмного забезпечення для вирішення завдань планування та управління їх
рухом у реальному часі. Промослова машина-гексапод наведено на рис. 8.3.

Рис. 8.3. Промослова
машина-гексапод

