Практичне заняття 4
Тема: Розрахунок потужності компенсувальних установок. Розподіл сумарної
потужності компенсувальних пристроїв
Мета заняття: набуття навику розрахунку потужності
компенсувальних пристроїв та розподілу їх сумарної потужності.
Приклад 1
В існуючій схемі електропостачання (рис. 4.1) потрібно
визначити потужності компенсувальних пристроїв, Qk1 і Qk2
у вузлах 1 і 2 виходячи з умови мінімуму сумарних витрат на встановлення цих
пристроїв і покриття втрат активної потужності в схемі.
Вихідні дані:
‑ напруга схеми U=10кВ;
‑ опори ліній R1=6Ом,
R2=4Ом;
‑ реактивні навантаження вузлів 1 і 2 Q1=600 квар і Q2=800 квар;
‑ питомі витрати на установку компенсувальних
пристроїв z0=0,5 у.о./квар;
- питомі витрати на покриття втрат активної потужності с0=10у.о./кВт.
Рис.4.1. Схема електропостачання
Розв’язок: Цільова функція, що представляє собою сумарні витрати на встановлення
компенсувальних пристроїв і покриття втрат активної потужності в схемі, має
такий вигляд:
![]()
де 
Введення числового коефіцієнта 10-3 необхідно для приведення всіх складових цільової
функції до однієї розмірності (у.о.).
Для розв’язку задачі виберемо метод покоординатного
"спуску". Визначимо часткові похідні цільової функції Z за змінними Qk1 і Qk2:

Приймемо вихідне наближення: ![]() Для цих значень
обчислимо значення цільової функції і її часткових похідних:
Для цих значень
обчислимо значення цільової функції і її часткових похідних:

Очевидно, що в напрямку змінної Qk2 цільова функція Z
спадає швидше, ніж у напрямку змінної Qk1,
оскільки ![]()
У напрямку змінної Qk2
і почнемо "спуск".
Приймемо величину кроку ![]() Перше наближення
(перший крок) буде
Перше наближення
(перший крок) буде ![]() Значення цільової
функції:
Значення цільової
функції:
![]()
Другий крок: ![]() Значення цільової
функції Z2=616 у.о.
Значення цільової
функції Z2=616 у.о.
Третій крок: ![]() Значення цільової
функції Z3=689у.о.
Значення цільової
функції Z3=689у.о.
Очевидно, що "спуск" координатою Qk2 доцільно припинити,
оскільки Z3>Z2,
і повернутися до значень змінних ![]() , отриманих на другому кроці.
, отриманих на другому кроці.
Виконаємо новий третій крок ![]() у напрямку іншої
змінної
у напрямку іншої
змінної ![]() Значення цільової
функції Z3=624 у.о. Рух у
напрямку змінної Qk1
недоцільний, оскільки Z3>Z2.
Значення цільової
функції Z3=624 у.о. Рух у
напрямку змінної Qk1
недоцільний, оскільки Z3>Z2.
Точка з координатами ![]() перебуває біля
мінімуму цільової функції Z. При
прийнятій довжині кроку
перебуває біля
мінімуму цільової функції Z. При
прийнятій довжині кроку ![]() більш точний розв’язок
отриманий бути не може.
більш точний розв’язок
отриманий бути не може.
Розв’язати цю задачу можна з використанням програмного
забезпечення MS Excel. Результати розв’язку наступні:
Qk1=183квар,
Qk2=800квар, Z=596у.o.
Цей розв’язок більш точний, значення цільової функції на
28 у.o. менше, ніж у методі покоординатного спуску з постійним кроком.
Приклад 2
В існуючій схемі електропостачання (рис. 4.2) потрібно
розподілити між вузлами 1, 2 і 3 сумарну потужність компенсувальних пристроїв,
яка дорівнює 1000 квар. Критерій
оптимальності ‑ мінімум втрат активної потужності.
Вихідні дані:
‑ напруга схеми U=10
кВ;
‑ опори ліній R1=0,4,
R2=0,5, R3=0,6Ом;
‑ реактивні навантаження вузлів Q1=600, Q2=500, Q3=400квар.
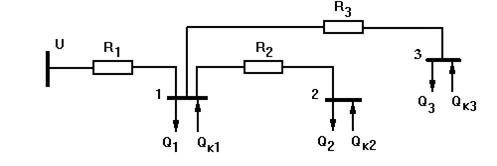
Рис.4.2. Схема електропостачання
Розв’язок: Відповідно до вихідних даних втрати активної потужності, які необхідно
мінімізувати (цільова функція) визначаються співвідношенням:

де 
Сумарна потужність джерел реактивної потужності
обмежується умовою:
![]()
![]()
Відповідно функція
Лагранжа буде мати вигляд:

Для визначення мінімуму функції Лагранжа обчислимо її
часткові похідні за всіма змінними і прирівняємо ці похідні до нуля:
 (4.1)
(4.1)
Отримана система лінійних рівнянь легко розв’язується. З
першого рівняння системи (4.1) визначається величина множника Лагранжа:
![]() (4.2)
(4.2)
Після підстановки ![]() в друге рівняння
системи, одержимо:
в друге рівняння
системи, одержимо:
![]() (4.3)
(4.3)
Звідки ![]()
Після підстановки ![]() в третє рівняння
системи, одержимо:
в третє рівняння
системи, одержимо:
![]()
Звідки ![]()
Із останнього рівняння системи (4.1):
![]()
І, нарешті, з першого рівняння системи (4.1) знайдемо
величину множника Лагранжа:
![]()
Відповідно до виразу цільової функції мінімальні втрати
активної потужності в схемі електропостачання при обмеженні сумарної потужності
компенсувальних пристроїв величиною Qk=1000квар
складуть:


