Лабораторна робота №1
Дослідження електромагнітних реле постійного та змінного струму
Мета роботи:
ознайомлення з конструктивним виконанням, принципом дії, основними параметрами
й характеристиками електромагнітних реле постійного та змінного струму типів ПЭ-21У, МКУ-48С, КДР.
Теоретичні відомості
Апарат релейної дії здійснює стрибкоподібну зміну вихідної
величини Y при заданих значеннях вхідної величини Х.
Найпростіший апарат цього типу наведений на рис. 1 у початковому положенні.
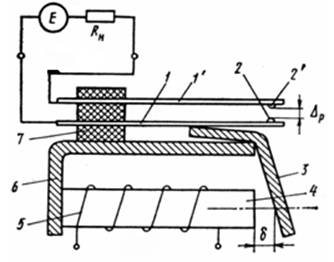
Рис.1. Найпростіше електромагнітне реле з
замикаючим контактом із плоскими консольно закріпленими контактними пружинами:
1 та 1' – відповідно рухома та нерухома контактні пружини; 2 та 2' –
контакт-деталі; 3 – якір; 4 – осердя; 5 – котушка; 6 – ярмо; 7 – ізоляційна
планка.
Якщо поступово збільшувати Івх в
його обмотці 5, то при певному його значенні якір 3 притягнеться до осердя 4. У
процесі цього руху верхній кінець якоря зігне плоску контактну пружину 1 вверх
до зіткнення її контакт-деталі 2 з контакт-деталлю 2¢ контактної пружини
1¢ –
станеться замикання контакту. У вихідному колі апарата буде протікати струм,
який після закінчення перехідного процесу стане рівним Івих.
Вихідний струм не зміниться при подальшому збільшенні вхідного. Якщо тепер
зменшувати вхідний струм, то при певному його значенні зігнені пружини 1 і 1¢ подолають силу
притягання якоря до осердя і повернуть якір у вихідне положення. При цьому
контакт розімкнеться, а вихідне коло буде знеструмлене. Під вхідною величиною Х
і вихідною Y цього апарата можна розуміти і інші величини,
наприклад, напругу на обмотці і напругу на опорі навантаження Rн.
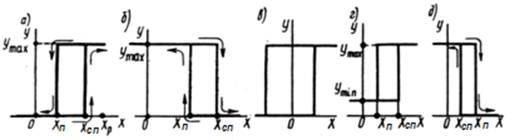
Рис. 2. Типові характеристики керування
апаратів релейної дії: а, б, в, д – електромеханічних; г – статичних
електричних; а, б, г, д – одностабільних; в – двостабільних; а, б, г –
максимальних; д – мінімальних; а, г, д – працюють на замкнення; б – працюють на
розмикання.
Характеристика
керування апарата релейної дії має форму релейної петлі (рис. 2):
стрибкоподібне зростання вихідної величини відбувається при одному значенні
вхідної, а зменшення – при іншому. Для решта значень вхідної величини Х
вихідна Y не змінюється.
До
комутаційних апаратів релейної дії відносяться реле.
В
залежності від області застосування реле останні можна розбити на реле для: 1)
промислової автоматики; 2) захисту електроенергетичних систем; 3)
радіоелектроніки; 4) морських і річних суден; 5) систем регулювання руху
поїздів і забезпечення безпеки на залізницях; 6) гірничодобувної та
нафтогазодобувної промисловості та ін.
Специфіка
областей застосування реле веде до великого різноманіття конструктивного виконання та видів реле, але
границі, які визначають одну область застосування від іншої, часто умовні,
визначаються відомчою підпорядкованістю підприємств, які випускають реле. Тому
деякі реле, які спроектовані для певної цілі, іноді можна з успіхом
використовувати для іншої.
Основними
параметрами реле є: величина спрацювання Хсп –
значення вхідної величини при якому відбувається стрибкоподібне збільшення
вихідної величини при замикаючому контакті (рис. 2, а, г, д) або
стрибкоподібне зменшення вихідної величини при розмикаючому контакті (рис. 2, б);
величина повернення Хп – значення вхідної величини,
при якому відбувається стрибкоподібне зменшення вихідної величини при
замикаючому контакті (рис. 2, а, г, д) або стрибкоподібне збільшення
вихідної величини при розмикаючому контакті (рис. 2, б). Відношення
величини повернення до величини спрацювання називається коефіцієнтом
повернення:
 .
.
Для
максимальних реле ![]() <1, для мінімальних
<1, для мінімальних ![]() >1. Чим ближче до одиниці коефіцієнт
повернення, тим в більш вузьких межах буде здійснюватись контроль вхідної
величини.
>1. Чим ближче до одиниці коефіцієнт
повернення, тим в більш вузьких межах буде здійснюватись контроль вхідної
величини.
Для надійного
спрацювання реле робоче значення вхідної величини Хр
(рис. 2, а) вибирається з деяким запасом, який визначається
коефіцієнтом запасу по вхідній величині:
 .
.
До основних
характеристик реле також відносяться: потужність спрацювання Рсп
– мінімальна потужність, яка споживається котушкою реле при спрацюванні;
комутована потужність Рвих – добуток максимального
струму, що вимикається, на напругу джерела живлення вихідного кола; коефіцієнт
керування Кк – відношення максимального значення
вихідної величини до величини спрацювання:
 .
.
Динамічні
характеристики реле можна визначити на основі часових діаграм роботи
одностабільного електромагнітного реле з обмоткою напруги з одним замикаючим
контактом, який комутує активно-індуктивне коло (рис. 3). На цьому рисунку під
моментом часу, позначеними по осі абсцис арабськими цифрами 1-14, розуміють: 0
– момент замикання вхідного кола; 1 –
момент початку руху якоря; 2 – момент першого замикання контакту вихідного
кола, початок деренчання контакту; 3 – кінець деренчання контакту; 4 – момент,
коли довжина робочого зазору реле в перший раз стала рівною мінімальній ![]() , початок вібрації якоря при спрацюванні; 5 – кінець вібрації
якоря при спрацюванні; 6 – момент, коли струм в обмотці реле практично досягає
усталеного значення
, початок вібрації якоря при спрацюванні; 5 – кінець вібрації
якоря при спрацюванні; 6 – момент, коли струм в обмотці реле практично досягає
усталеного значення  ; 7 – момент розмикання вхідного кола; магнітний потік у
магнітопроводі починає зменшуватись, індукуючи в магнітопроводі вихрові струми,
які підтримують потік; 8 – момент, коли струм вхідного кола падає до нуля; 9 –
момент початку руху якоря у зворотному напрямку; 10 – момент першого розмикання
замикаючого контакту (початок можливого деренчання контакту при розмиканні); 11
– момент закінчення деренчання розглядуваного контакту; 12 – момент, коли
перший раз при поверненні зазор став рівним максимальному
; 7 – момент розмикання вхідного кола; магнітний потік у
магнітопроводі починає зменшуватись, індукуючи в магнітопроводі вихрові струми,
які підтримують потік; 8 – момент, коли струм вхідного кола падає до нуля; 9 –
момент початку руху якоря у зворотному напрямку; 10 – момент першого розмикання
замикаючого контакту (початок можливого деренчання контакту при розмиканні); 11
– момент закінчення деренчання розглядуваного контакту; 12 – момент, коли
перший раз при поверненні зазор став рівним максимальному ![]() , початок вібрації якоря при поверненні; 13 – кінець вібрації
якоря при поверненні; 14 – момент, коли струм у вихідному колі став рівним
нулю.
, початок вібрації якоря при поверненні; 13 – кінець вібрації
якоря при поверненні; 14 – момент, коли струм у вихідному колі став рівним
нулю.
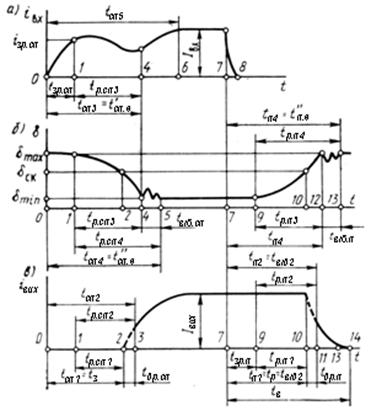
Рис.
3. Часові діаграми роботи електромагнітного реле з обмоткою напруги з одним
замикаючим контактом: а – струм вхідного сигналу; б – довжина робочого зазору;
в – струм вихідного кола
Проміжки часу при спрацюванні: час зрушення
при спрацюванні ![]() – час від моменту
замикання вхідного кола до моменту початку руху якоря;
– час від моменту
замикання вхідного кола до моменту початку руху якоря; ![]() – час руху якоря до
першого замикання контакту;
– час руху якоря до
першого замикання контакту; ![]() – час замикання
контакту;
– час замикання
контакту; ![]() – час деренчання
контакту при спрацюванні;
– час деренчання
контакту при спрацюванні; ![]() – час руху якоря до
кінця деренчання контакту;
– час руху якоря до
кінця деренчання контакту; ![]() – час руху якоря до
моменту, коли немагнітний зазор став у перший раз при вмиканні рівним
– час руху якоря до
моменту, коли немагнітний зазор став у перший раз при вмиканні рівним ![]() ;
; ![]() – час вібрації якоря
при спрацюванні;
– час вібрації якоря
при спрацюванні; ![]() – повний час руху
якоря при спрацюванні. В залежності від споживача часом спрацювання реле можна
рахувати будь-який із відрізків часу
– повний час руху
якоря при спрацюванні. В залежності від споживача часом спрацювання реле можна
рахувати будь-який із відрізків часу ![]() ;
; ![]() ;
; ![]() ;
; ![]() і
і ![]() – час до моменту, коли
струм вхідного кола і потік в магнітопроводі наблизяться до усталених значень.
Частіше всього під часом спрацювання розуміють
– час до моменту, коли
струм вхідного кола і потік в магнітопроводі наблизяться до усталених значень.
Частіше всього під часом спрацювання розуміють ![]() .
.
Проміжки часу при поверненні: час зрушення
при поверненні ![]() – час спаду потоку у
магнітній системі до величини, при якій сума електромагнітної сили і сил тертя
стає менше механічної сили, яка повертає якір у вихідне положення;
– час спаду потоку у
магнітній системі до величини, при якій сума електромагнітної сили і сил тертя
стає менше механічної сили, яка повертає якір у вихідне положення; ![]() – час від початку руху
якоря до моменту першого розмикання контакту реле;
– час від початку руху
якоря до моменту першого розмикання контакту реле; ![]() – час розмикання цього
контакту;
– час розмикання цього
контакту; ![]() – час деренчання
контакту при поверненні;
– час деренчання
контакту при поверненні; ![]() – час руху якоря до
кінця деренчання контакту при поверненні;
– час руху якоря до
кінця деренчання контакту при поверненні; ![]() – час руху якоря при
поверненні до моменту, коли зазор в перший раз стане рівним
– час руху якоря при
поверненні до моменту, коли зазор в перший раз стане рівним ![]() ;
; ![]() – час вібрації якоря
при поверненні;
– час вібрації якоря
при поверненні; ![]() – повний час руху
якоря при поверненні;
– повний час руху
якоря при поверненні; ![]() – час вимкнення
вихідного кола реле.
– час вимкнення
вихідного кола реле.
Під часом повернення реле розуміють ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Електромагнітні
реле – це електромеханічні реле, робота яких заснована на дії
магнітного поля нерухомої обмотки зі струмом на рухомий феромагнітний елемент
(якір). Найбільш розповсюдженими конструкціями одностабільних електромагнітних
реле є конструкції, які наведені на рис. 1 і рис. 4. При подачі напруги на
обмотку 5 в магнітопроводі виникає потік, який створює силу, що переміщує якір
4 (рис. 4) таким чином, щоб зменшити довжину робочих зазорів системи.
Безпосередньо або через передавальні ланки (тяга 6, рис. 4, б, в) з
якорем зв’язаний рухомий контактний елемент. У реле на рис. 4, а, б
рухомий контактний елемент складається з плоских, консольно закріплених
контактних пружин 1 і контакт-деталей 2, а у реле рис. 4, в з поступальним
рухом якоря – із циліндричної гвинтової контактної пружини 1 і контактного
містка 8 з двома контакт-деталями 2. При деякому проміжному положенні якоря
контакт-деталі 2 рухомого контактного елемента стикаються з контакт-деталями 2¢ (рис. 4, а, б),
а також 2¢ і 2¢¢ (рис. 4, в).
При подальшому русі якоря, аж до його кінцевого положення при спрацюванні,
відбудеться збільшення контактного натиснення. В конструкції рис. 4, а при
цьому відбувається згин пружини 1 рухомого контактного елемента; в конструкції
рис. 1.4, б – згин контактних пружин 1 і 1¢. В конструкції
рис. 1.4, в після зіткнення контакт-деталей 2 містка 8 з нерухомими
контакт-деталями 2¢ і 2¢¢ лівий кінець
контактної пружини зупиняється. Тоді як правий кінець продовжує переміщуватись
разом з тягою 6. При цьому відбувається стиснення контактної пружини 1.
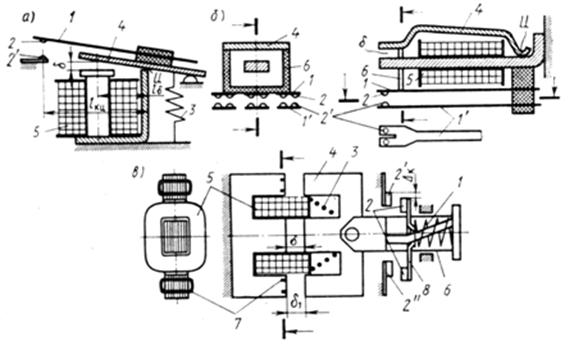
Рис. 4.
Одностабільні електромагнітні реле з неврівноваженим якорем
Після зняття вхідного сигналу струм обмотки
зменшується до нуля, а потім в магнітопроводі зменшується від максимального
значення до залишкового. При деякому значенні потоку, який більший, ніж
залишковий, сила, яка розвивається деформованими при спрацюванні пружинами
електромагніта, виявляється більшою за електромагнітну силу. Якір повертається
у початкове положення під дією: контактних пружин 1 і 1¢ на рис. 4, б;
контактної пружини 1 і пружини повернення 3 на рис. 4 а, в.
Для зменшення залишкового потоку до величини, при якій
виключається залипання якоря, можуть використовуватись немагнітні прокладки або
заклепки, які встановлюються безпосередньо на якорі. Іноді в цих елементах
взагалі не виникає необхідності, наприклад, при великій товщині немагнітного
покриття магнітопроводу, при сильній контактній пружині і пружині повернення,
при значних неробочих зазорах. Залишковий потік реле рис. 4, в зменшується
через різні за довжиною зазор (![]() , так що при
, так що при ![]() =0 зазор
=0 зазор ![]() >0).
>0).
Під
довжиною робочого зазору d для систем
з декількома робочими зазорами на рис. 4 розуміють основний робочий зазор, до
якого приводяться електромагнітна і механічна сили. Для клапанної магнітної
системи довжина зазору d – відстань
між якорем і торцем осердя, яка вимірюється вздовж осі осердя. В цьому зазорі
створюється більша частина обертового моменту.
Тягова
характеристика електромагнітного реле – це залежність сумарної приведеної до
робочого зазору електромагнітної сили, яка діє на якір, від довжини цього
зазору при постійній напрузі живлення або при постійному струмі.
Тягова
характеристика при повільній зміні положення якоря називається статичною, при
швидкій – динамічною.
Під
статичною механічною характеристикою електромагнітного реле розуміють
залежність сумарної приведеної до робочого зазору механічної сили, яка діє на
якір, від довжини цього зазору. Для нормальної роботи реле його динамічні
тягові характеристики при спрацюванні і при поверненні треба узгоджувати з
механічною характеристикою. Часто обмежуються узгодженням статичних тягових
характеристик з механічною характеристикою, оскільки розрахунок динамічних
характеристик електромагнітного реле занадто складний. Розглянемо питання
узгодження цих характеристик для електромагнітного реле, керованого джерелом
напруги. При різних напругах на обмотці реле статичні тягові характеристики
(криві 2, 2¢, 3-7, рис.
5) відносно механічної (жирні ломані лінії 1 на рис. 5) можуть займати різне
положення: бути вище основної частини (ділянки necb) механічної характеристики,
не торкаючись з нею (криві 4 на рис. 5, а, б), або торкаючись в одній якій-небудь
точці (криві 2 на рис. 5); перетинати її (криві 5 і 6 на рис. 5, б і 2¢ на рис. 5, в);
бути нижче основної частини механічної характеристики, торкаючись з нею в
якій-небудь точці (криві 3 на рис. 5, а ,б) і не торкаючись з нею (крива 7).
Очевидно, що при напрузі, яка відповідає характеристиці 2, якір притягнеться до
осердя, оскільки при усіх зазорах у діапазоні від dmax до dmin статична
електромагнітна сила більша за механічну або дорівнює їй. Стан рухомої системи
реле, який відповідає dmax на рис. 5,
а, можна рахувати станом нестійкої рівноваги, так як при будь-якому нескінченно
малому збільшенні напруги живлення обмотки або нескінченно малому зменшенні
зазору якір почне переміщуватись у бік подальшого зменшення зазору аж до dmin. Стан
рухомої системи реле, який відповідає зазору dmin і при
якому тягові характеристики 2 перетинаються з механічною в точці m (рис. 5, а,
б), – стан стійкої рівноваги.
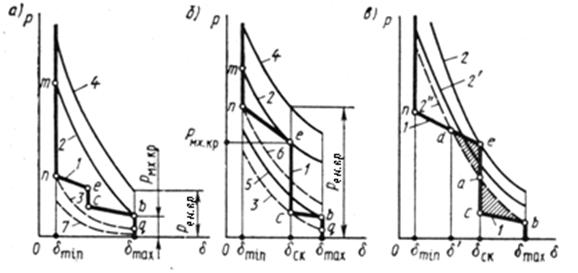
Рис. 5. Статичні (2, 2', 3, 4, 5, 6, 7), динамічна (2'') та
механічна (1) характеристики електромагнітного реле
В
цьому стані при зміні напруги живлення якір реле залишиться при dmin нерухомим,
а при випадковому збільшенні зазору виникнуть сили, які повертають якір в
кінцеве положення, коли d = dmin.
Якщо
на обмотку реле подається напруга, яка відповідає тяговим характеристикам 5, 6
(рис. 5, б) і 2¢ (рис. 5,
в) і перетинає основну частину механічної характеристики на довжині ес, реле може спрацювати, а може і не
спрацювати. Динамічна тягова характеристика 2² реле при
спрацюванні завжди лежить нижче статичної 2¢ (рис. 5, в), так
як миттєвий струм івх в обмотці реле постійного струму завжди менше
усталеного струму.
При
зазорах від dmax до dск (рис. 5,
в) тягова характеристика 2¢ лежить
вище механічної. Сумарна сила ![]() , яка діє на якір, збільшує швидкість рухомих частин реле.
Останні здійснюють роботу А1, яка пропорційна площі криволінійного
трикутника авс (рис. 5, в). При зазорах від dск до d¢
електромагнітна сила менша за механічну, тому сумарна сила
, яка діє на якір, збільшує швидкість рухомих частин реле.
Останні здійснюють роботу А1, яка пропорційна площі криволінійного
трикутника авс (рис. 5, в). При зазорах від dск до d¢
електромагнітна сила менша за механічну, тому сумарна сила ![]() зменшує швидкість
рухомих частин. Робота А2 сумарної сили на цій ділянці пропорційна
площі криволінійного трикутника аde на рис. 5, в. Якщо А1 > А2 , то рухома
система реле буде продовжувати рух аж до dmin, причому на ділянці від d¢ до dmin вона буде
прискорюватись під дією сили
зменшує швидкість
рухомих частин. Робота А2 сумарної сили на цій ділянці пропорційна
площі криволінійного трикутника аde на рис. 5, в. Якщо А1 > А2 , то рухома
система реле буде продовжувати рух аж до dmin, причому на ділянці від d¢ до dmin вона буде
прискорюватись під дією сили ![]() , накопичуючи кінетичну енергію. Якщо А1 <
А2 , то після декількох коливань рухома система реле
зупиниться при зазорі dск . Цей режим
слід розглядати як аварійний, оскільки не забезпечується нормальне натискання
контакт-деталей.
, накопичуючи кінетичну енергію. Якщо А1 <
А2 , то після декількох коливань рухома система реле
зупиниться при зазорі dск . Цей режим
слід розглядати як аварійний, оскільки не забезпечується нормальне натискання
контакт-деталей.
Після
стану завершуваного спрацювання повернення якоря у початкове положення може
бути здійснено шляхом зниження напруги живлення, розмикання або закорочування
обмотки. Розглянемо перший шлях. На рис. 5, б наведені тягові характеристики 5
і 6, які відповідають напругам, при яких для зазорів від dmin до dск
електромагнітна сила менша за механічну або дорівнює їй. Остання в цьому
випадку є рушійною і якір реле почне рух у бік збільшення d. При напрузі, яка
відповідає тяговій характеристиці 3 (рис. 5, а, б), якір повернеться у
початкове положення dmax. Тоді стан
рухомої системи реле в точці n на рис. 5, а – це стан нестійкої
рівноваги, а стан в точці q – це стан стійкої рівноваги.
За
принципом роботи і по конструкції електромагнітні реле змінного струму
аналогічні електромагнітним реле постійного струму. Незважаючи на змінний
характер струму, напрямок електромагнітної сили, яка діє на якір, не
змінюється.
Особливістю
реле змінного струму є наявність пульсацій магнітного потоку. Якщо напруга
живлення синусоїдна, то і потік також синусоїдний ![]() . Тоді тягова електромагнітна сила, яка виникає в реле:
. Тоді тягова електромагнітна сила, яка виникає в реле:
![]()
![]() змінюється
від 0 до Fm , пульсуючи з подвійною частотою напруги
живлення (крива 1 рис. 6, а). При наявності протидіючої механічної сили
пульсація тягової сили викликає вібрацію якоря і контактів реле. Ефективним
засобом зниження пульсації тягової сили є застосування короткозамкненого витка,
який охоплює частину полюса магнітної системи реле (рис. 6, б). Загальний
потік Ф, який створюється МРС обмотки, в області полюса
розгалужується на два потоки Ф1 і Ф2
. Потік Ф2 наводить у короткозамкненому витку ЕРС, і
тому в ньому виникає струм, який створює свій магнітний потік Фк,
спрямований назустріч потоку Ф2. Таким чином, в
робочому зазорі магнітопроводу реле протікають магнітні потоки ФІ
і ФІІ відповідно через не екрановану і екрановану
витком частину полюса, які зсунуті за фазою на кут y:
змінюється
від 0 до Fm , пульсуючи з подвійною частотою напруги
живлення (крива 1 рис. 6, а). При наявності протидіючої механічної сили
пульсація тягової сили викликає вібрацію якоря і контактів реле. Ефективним
засобом зниження пульсації тягової сили є застосування короткозамкненого витка,
який охоплює частину полюса магнітної системи реле (рис. 6, б). Загальний
потік Ф, який створюється МРС обмотки, в області полюса
розгалужується на два потоки Ф1 і Ф2
. Потік Ф2 наводить у короткозамкненому витку ЕРС, і
тому в ньому виникає струм, який створює свій магнітний потік Фк,
спрямований назустріч потоку Ф2. Таким чином, в
робочому зазорі магнітопроводу реле протікають магнітні потоки ФІ
і ФІІ відповідно через не екрановану і екрановану
витком частину полюса, які зсунуті за фазою на кут y:
![]() .
.
Під
дією потоків ФІ і ФІІ в
робочому зазорі буде створюватись результуюча тягова електромагнітна сила:
 .
.
Результуюча
тягова сила Fе.р (крива 2, рис. 6, а) як і раніше
має пульсуючий характер. Однак її мінімальне значення Fe min ¹ 0. Тому при
умові Fe min > Fмх результуюча
тягова сила Fе.р в будь-які моменти часу буде більша
протидіючих механічних сил. В результаті цього усувається вібрація якоря та
контактів електромагнітного реле змінного струму.
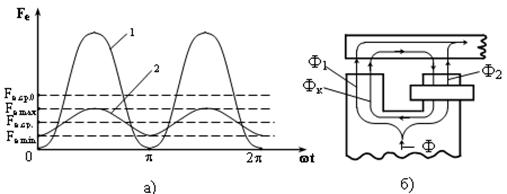
Рис.6. Часові діаграми пульсації тягової сили
електромагнітного реле і діаграма розподілу магнітних потоків у полюсі
магнітної системи реле при наявності короткозамкненого витка
Дамо порівняльний
аналіз електромагнітів постійного та змінного струму реле з обмотками напруги.
Магнітопровід на постійному струмі суцільний, на змінному – шихтований.
Зміна
струму в обмотці при спрацюванні і поверненні електромагніта постійного струму
(рис. 3) показує, що в динаміці струм в його обмотці завжди менший усталеного
значення.
Електромагніт
змінного струму володіє автоматичним форсуванням: діючий струм в його обмотці
при притягнутому якорі завжди менший, ніж при інших його положеннях. Вигода
цього форсування очевидна: при максимальному зазорі, коли потрібна велика МРС
для подолання великого магнітного опору робочого зазору, обмотка створює її
автоматично; при мінімальному зазорі, коли велика МРС не потрібна, обмотка її
автоматично знижує. Тому габарити обмотки і електромагніта звичайно
визначаються її нагрівом, струмом при притягнутому якорі. Аналогічну зміну МРС
у процесі вмикання електромагніта постійного струму можна отримати тільки за
допомогою спеціальної схеми.
Робочий
потік електромагніта змінного струму зі зменшенням довжини зазору збільшується
у значно меншій степені, ніж потік електромагніта постійного струму. Оскільки
електромагнітна сила пропорційна квадрату потоку, то і сила електромагніта
постійного струму збільшується при зменшенні зазору в значно більшій степені,
ніж у електромагніта змінного струму.
Якщо
створити в зазорі електромагніта змінного струму індукцію, амплітудне значення
якої дорівнює індукції в зазорі електромагніта постійного струму, то при
однаковій площі поперечного перерізу полюсів електромагніт змінного струму
створює середню за період силу у два рази меншу ніж електромагніт постійного
струму.
Коли
однакові електромагнітні сили та індукції, то за міркуваннями, які зазначені
при попередньому порівнянні, площа поперечного перерізу магнітопроводу на
змінному струмі має бути у два рази більшою, ніж на постійному. Тому матеріал
магнітопроводу електромагнітів змінного струму використовується гірше ніж
електромагнітів постійного струму.
Так
як у електромагнітів змінного струму звичайно не вдається повністю усунути
пульсацію електромагнітної сили, то в зазначених вище умовах для усунення
вібрації якоря слід додатково збільшувати площу поперечного перерізу
магнітопроводу таким чином, щоб не середня, а максимальна тягова сила
електромагніта змінного струму була рівною силі, яка розвивається
електромагнітом постійного струму.
При
заданому ході в контакті, контактному натисканні і характеристиці пружини
повернення електромагніта постійного струму буде тим менших розмірів, чим
менший хід якоря. Електромагніт змінного струму – навпаки. Для електромагнітів
постійного струму вигідно збільшувати в розумних межах ![]() (рис. 4, а), а
для електромагнітів змінного струму – зменшувати. Дійсно, на постійному струмі
збільшення
(рис. 4, а), а
для електромагнітів змінного струму – зменшувати. Дійсно, на постійному струмі
збільшення ![]() у двічі дозволяє
зменшити хід якоря у 2 рази. Це вимагає збільшити електромагнітну силу у 2 рази
у порівнянні з необхідним зусиллям у контакті. Але зменшення зазору у 2 рази
приведе до збільшення сили у 4 рази. Оскільки силу необхідно збільшити усього у
2 рази, то можна зменшити МРС, а тому масу і габарити електромагніта при тій
самій температурі обмотки. Тому електромагніти реле постійного струму роблять клапанними. Але це правило
конструктивними та іншими міркуваннями
завжди виконується. На змінному струмі набули великого поширення реле з прямо
ходовими магнітними системами (рис. 4, в); у цих реле хід в контакті
рівний ходу якоря.
у двічі дозволяє
зменшити хід якоря у 2 рази. Це вимагає збільшити електромагнітну силу у 2 рази
у порівнянні з необхідним зусиллям у контакті. Але зменшення зазору у 2 рази
приведе до збільшення сили у 4 рази. Оскільки силу необхідно збільшити усього у
2 рази, то можна зменшити МРС, а тому масу і габарити електромагніта при тій
самій температурі обмотки. Тому електромагніти реле постійного струму роблять клапанними. Але це правило
конструктивними та іншими міркуваннями
завжди виконується. На змінному струмі набули великого поширення реле з прямо
ходовими магнітними системами (рис. 4, в); у цих реле хід в контакті
рівний ходу якоря.
Механічна
зносостійкість електромагнітів постійного струму, елементи магнітопроводу яких
виконуються суцільними, як правило, суттєво вища, ніж електромагнітів змінного
струму, магнітопровід яких виконується з окремих пластин, котрі мають бут
скріплені між собою і разом з тим ізольовані одна від одної електрично.
Порядок виконання роботи
1. Ознайомитись з
будовою електромагнітних реле постійного та змінного струму типів ПЭ-21У,
МКУ-48С, КДР. Записати паспортні дані цих реле.
2.
Експериментально визначити основні параметри та характеристики досліджуваних
електромагнітних реле. З цією метою зібрати схему, яка наведена на рис. 7.
Плавно збільшуючи за допомогою ЛАТРа напругу на обмотці реле KV, добитись його
спрацювання. Виміряти напругу спрацювання Uсп ,
струм спрацювання Ісп , вихідну напругу Uвих
та вихідний струм Івих. Потім, плавно зменшуючи
напругу на обмотці реле KV, добитись його повернення у вихідний стан. Виміряти
напругу повернення Uп та струм повернення Іп
досліджуваного реле. Результати дослідів для кожного із реле занести в таблицю 1.
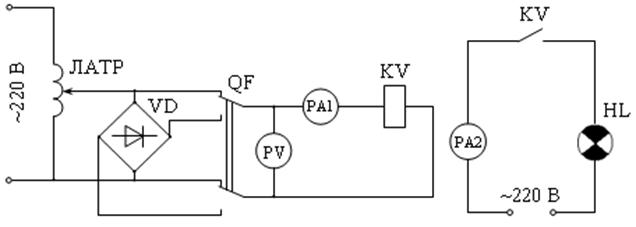
Рис. 7. Схема для визначення основних параметрів і
характеристик електромагнітного реле
Таблиця 1
|
Тип реле |
Виміряне |
Обчислено |
|||||||||
|
Uсп |
Ісп |
Uвих |
Івих |
Uп |
Іп |
Рсп |
Рвих |
Кп |
Кк |
Кз |
|
|
В |
А |
В |
А |
В |
А |
Вт |
Вт |
- |
- |
- |
|
|
ПЭ-21У |
|
|
|
|
|
|
|
|
|
|
|
|
МКУ-48С |
|
|
|
|
|
|
|
|
|
|
|
|
КДР |
|
|
|
|
|
|
|
|
|
|
|
Для
таблиці 1 обчислити потужність спрацювання Рсп,
розривну потужність контактів реле Рвих, коефіцієнт
повернення Кп, коефіцієнт керування Кк
та коефіцієнт запасу Кз, а також побудувати
характеристику керування для усіх типів досліджуваних реле.
3.
Зняти вхідну характеристику Івх(Uвх) для
усіх типів досліджуваних реле, застосовуючи схему на рис. 7. З цією метою за
допомогою ЛАТРа збільшувати вхідну напругу від нуля до робочого значення.
Вхідну напругу Uвх виміряти за допомогою вольтметра
PV, а вхідний струм Івх – за допомогою амперметра PA1.
Потім за допомогою ЛАТРа зменшувати вхідну напругу від робочого значення до
нуля і також виміряти вхідну напругу і вхідний струм. Результати дослідів для
кожного із реле занести в таблицю 2.
Таблиця 2
|
Тип реле |
Збільшення
Uвх |
Зменшення
Uвх |
||||||||
|
Uвх,
В |
|
|
|
|
|
|
|
|
|
|
|
Івх,
А |
|
|
|
|
|
|
|
|
|
|
За
даними таблиці 2 побудувати характеристики Івх(Uвх)
і визначити за ними втрати в сталі для усіх типів досліджуваних реле за
формулою:
![]() .
.
Визначити найбільш
якісне з цієї точки зору електромагнітне реле.
4.
Експериментально визначити час спрацювання tcn і час
повернення tn для усіх типів досліджуваних реле за
допомогою електросекундоміра. З метою визначення часу спрацювання реле зібрати
схему, яка наведена на рис. 8. За допомогою ЛАТРа встановити за показником
вольтметра PV робочу напругу для даного типу реле. Ввімкнути вимикач QF і за
електросекундоміром виміряти час спрацювання реле.
З
метою визначення часу спрацювання реле зібрати схему, яка наведена на рис. 9.
За допомогою ЛАТРа установити за показниками вольтметра PV робочу напругу для
даного типу реле.
Ввімкнути вимикач
QF. При цьому спрацює реле KV і розімкне свій розмикаючий контакт KV, який
шунтує двигун М електросекундоміра. Тепер вимкнути вимикач QT і за
електросекундоміром виміряти час повернення реле.
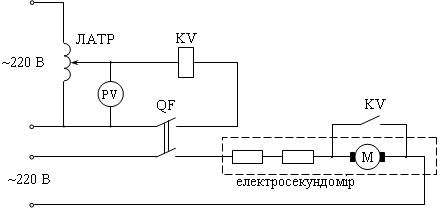
Рис. 8. Схема вимірювання часу спрацювання електромагнітного
реле

Рис. 9.
Схема для вимірювання часу повернення реле
Контрольні питання
1. Поясніть, що
таке електромагніт і назвіть області його застосування.
2.
Поясніть конструкцію та принцип дії найпростішого електромагнітного реле з
замикаючим контактом із плоских консольно закріплених контактних пружин.
3.
Охарактеризуйте основні параметри та характеристики електромагнітних реле.
4. Намалюйте часові
діаграми роботи одностабільного електромагнітного реле постійного струму з
обмоткою напруги і дайте їм пояснення.
5.
Порівняйте конструкції одностабільних електромагнітних реле з незрівноваженим
якорем.
6.
Поясніть, як узгоджується тягова та механічна характеристики електромагнітного
реле керованого джерелом напруги.
7.
Назвіть причини, які викликають вібрацію якоря в електромагнітних реле змінного
струму.
8.
Поясніть призначення короткозамкненого витка в електромагнітних реле змінного
струму.
9.
Поясніть, що станеться з електромагнітним реле змінного струму, якщо на його
обмотку подати постійну робочу напругу.
10.
Поясніть, що станеться з електромагнітним реле постійного струму, якщо на його
обмотку подати змінну робочу напругу.

