Практична робота № 3
Тема: Інженерний
метод побудови алгоритмів пошуку
несправностей
Мета роботи: вивчення
методів побудови алгоритмів діагностування і пошуку несправностей.
Теоретичні відомості
Цей метод побудови алгоритмів діагностування
заснований на обчисленні функції переваги. При цьому вихідними даними є
функціональна модель ОД і таблиця несправностей.
Функція переваги вибирається відповідно до
розв'язуваної завданням діагностики та вихідними даними. При цьому
розглядаються три випадки визначення переліку параметрів:
а)
для оцінки працездатності;
б)
для пошуку несправностей;
в)
для оцінки працездатності і пошуку несправностей.
Функція
переваги при оцінці працездатності:
N
W1= max
Wi (Zi) = ∑
S0 (i j) ,
(3.1)
i ![]() N j=1
N j=1
де S0(ij)=1, якщо стан ij-го
матричного елементу описується нулем, і S0(ij) = 0, якщо стан ij-го
матричного елемента описується одиницею.
Першим для контролю беруть параметр Zi,
у якого функція W1(Zi) має максимальне значення. В
результаті контролю даного параметру матриця станів ділиться на дві частини. В
одну частину входять стани, для яких результати контролю обраного параметра
мають позитивні, а в іншу – негативні рішення.
Надалі
треба контролювати тільки першу частину, через те, що потрібно фіксувати тільки
факт справності або відмови. Для неї аналогічним чином потрібно обчислити
значення Wi (Zi) і вибрати для контролю параметр по
максимуму Wi (Zi).
Приклад завдання
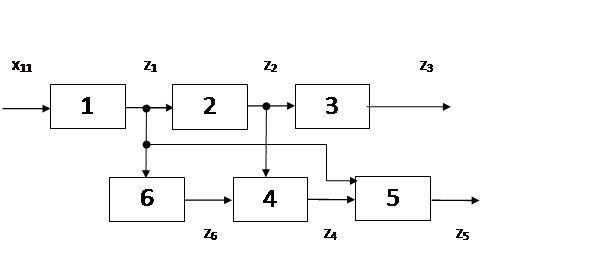
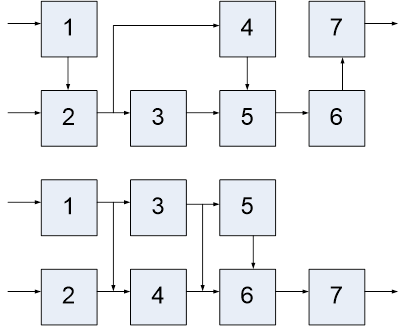
Рисунок 3.1 -
Функціональна модель ОД
Першим для контролю обираємо Z5 по
максимуму W1(Z5). В результаті контролю в рядку Z5
позитивне рішення має лише Z3 , отже наступним для контролю потрібно обрати Z3 .
Таблиця 3.1
|
Zi |
Si |
Wi |
|||||
|
|
S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
|
|
Z1 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
|
Z2 |
0 |
0 |
1 |
1 |
1 |
1 |
2 |
|
Z3 |
0 |
0 |
0 |
1 |
1 |
1 |
3 |
|
Z4 |
0 |
0 |
1 |
0 |
1 |
0 |
4 |
|
Z5 |
0 |
0 |
0 |
0 |
0 |
0 |
6 |
|
Z6 |
0 |
1 |
1 |
1 |
1 |
0 |
2 |
Якщо
для ОД відомі ймовірності
станів Р(Si), то
функція переваги:
W2 = maxW2(Zi) ,
(3.2)
i ![]() N
N
N
W2 (Zi)
= ∑
P (Si)S0 (i
j) ,
(3.3)
i =1
Якщо для ОД відомі і вартості контролю
параметрів С(Zi), то
функція переваги:
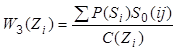 (3.4)
(3.4)
Розглянемо складання алгоритму пошуку
несправностей. Максимальну кількість інформації дає контроль параметра, який поділяє
всі можливі стани на дві рівні частини. Тоді функція переваги:
N N
W4 (Zi) = min | ∑ S0 (i
j) - ∑ S1 (i j)| (3.5)
j =1 j =1
де S1(ij)=1, якщо стан матричного елементу описується одиницею, і S1
(ij)=0, якщо стан матричного
елементу описується нулем,
S0(ij)=1,
стан матричного елементу описується
нулем, S0(ij)=0, стан матричного елементу описується одиницею.
Першим для контролю обирається параметр, для
контроля якого функція переваги W4 мінімальна. Результати контролю Zi поділяють матрицю станів
на дві частини. В першу частину входять стани, для яких результат контролю
негативний (на перетині Zi
– SJ стоїть нуль), до другої
частини входять стани, для котрих результат контролю позитивний. Для отриманих
частин звнову обчислюють функції переваги.
За їх мінімальним значенням вибирають другий
контрольований параметр (при позитивному результаті контролю першого обраного
параметру) або третій контрольований параметр (при негативному результаті
контролю першого обраного параметру). Сукупність параметрів і послідовність їх
контролю вибирається до тих пір, поки множина N можливих станів ОД не буде
поділеною на окремі помітні стани з необхідною глибиною пошуку.
У випадку, коли задані ймовірності станів P
(Si) апаратури що діагностується і вартості контролю параметрів С (Zi) функціональних елементів,
функції переваги приймуть вигляд:
N N
W5 (Zi) = min | ∑ P(Si)S0
(i j) - ∑ P(Si)S1
(i j)|
(3.6)
j =1 j =1
N N
W6 (Zi) = min С(Zi) | ∑ P(Si)S0
(i j) - ∑ P(Si)S1
(i j)| (3.7)
j =1 j =1
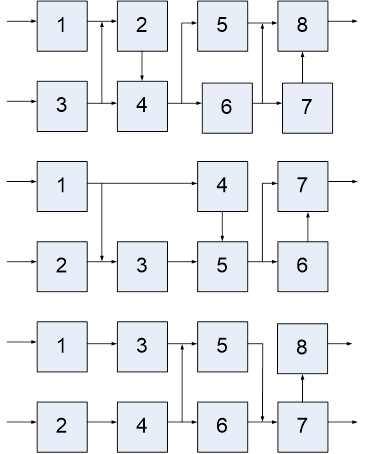
Приклад
Побудувати схему пошуку несправностей
використовуючи функціональну модель об’єкта діагностування надану на рис.3.2.
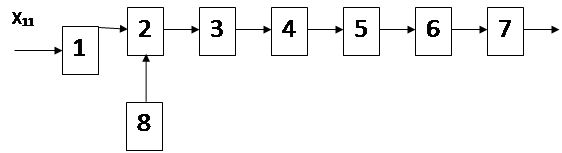
Рисунок 3.2 - Функціональна модель ОД
Таблиця
3.2
|
Zi |
Si |
|||||||
|
S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
S7 |
S8 |
|
|
Z1 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
Z2 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
|
Z3 |
0 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
|
Z4 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
|
Z5 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
|
Z6 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
|
Z7 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
Z8 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
0 |
Для кожного параметру Zi табл. 1.6 по формулі (3.5) визначається значення W4
. Отримані значення записують в табл.
1.7 і по мінімальному значенню обирають для контролю параметр Z3 .
Таблиця 3.3
|
Zi |
Si |
W4 |
|||||||||
|
S1 |
S2 |
S3 |
S4 |
S5 |
S6 |
S7 |
S8 |
||||
|
0 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
6 |
||
|
1 |
0 |
0 |
1 |
1 |
1 |
1 |
1 |
0 |
2 |
||
|
|
0 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
||
|
Z4 |
0 |
0 |
0 |
0 |
1 |
1 |
1 |
0 |
2 |
||
|
Z5 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
4 |
||
|
Z6 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
6 |
||
|
Z7 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
8 |
||
|
Z8 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
0 |
6 |
||
В результаті контролю параметра Z3 табл. 3.3 ділиться на дві
частини: в першу частину входять функціональні елементи 4, 5, 6 і 7, для яких
результат контролю Z3
позитивний, в другую частину входять функціональні елементи 1, 2,
3 и 8, для яких результат
контролю негативний, что означає несправність одного из цих елементів.
При
пошуку несправностей контролю підлягають обидві частини матриці, тому кожну
частину з них представляємо у вигляді табл. 3.4, а іншу табл. 3.5. Для кожної з отриманих таблиць визначаємо
значення функцій переваги W4. По мінімуму W4 в табл. 3.4 вибираємо для контролю
параметр Z5, в табл. 3.5 вибираємо для
контролю Z1.
Таблиця 3.4
Таблиця 3.5
|
|
Si |
W4 |
|||
|
S4 |
S5 |
S6 |
S7 |
||
|
Z4 |
0 |
1 |
1 |
1 |
2 |
|
Z5 |
0 |
0 |
1 |
1 |
0 |
|
Z6 |
0 |
0 |
0 |
1 |
2 |
|
Z7 |
0 |
0 |
0 |
0 |
4 |
|
Zi |
Si |
W4 |
|||
|
S1 |
S2 |
S3 |
S8 |
||
|
Z1 |
0 |
1 |
1 |
1 |
2 |
|
Z2 |
0 |
0 |
1 |
0 |
2 |
|
Z3 |
0 |
0 |
0 |
0 |
4 |
|
Z8 |
1 |
1 |
1 |
0 |
2 |
Аналогічні поділи показані в табл. 3.6 – 3.8.
Схема пошуку несправностей показана на рис. 3.3.
Таблиця
3.6
|
Zi |
Si |
W4 |
||
|
S1 |
S2 |
S8 |
||
|
Z1 |
0 |
1 |
0 |
1 |
|
Z2 |
0 |
0 |
1 |
3 |
|
Z8 |
1 |
1 |
0 |
1 |
![]()
![]()
Таблиця 3.7
|
Zi |
Si |
W4 |
|
|
S6 |
S7 |
||
|
|
0 |
1 |
0 |
|
Z7 |
0 |
0 |
2 |
7
Таблиця 3.8
|
1 |
Si |
W4 |
|||
|
S4 |
S5 |
||||
|
Z4 |
0 |
1 |
0 |
||
|
|
0 |
0 |
2 |
||
0
![]()
5 4
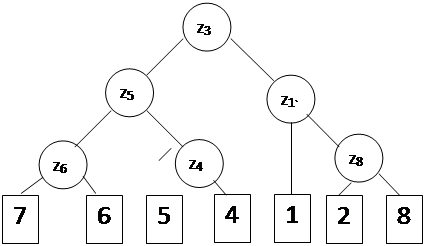
Рисунок
3.3 - Схема пошуку несправностей в пристрої що діагностирується
Практична частина
1.
Вивчити методичні вказівки й одержати завдання.
2.
Для обраного варіанту скласти схему пошуку несправностей, використовуючи одну из представлених функціональних моделей ОД.
3.
Оформити звіт про практичну роботу.
4.
Захистити звіт про практичну роботу при співбесіді з викладачем.
Звіт повинний
містити:
1.
Мету роботи.
2.
Завдання.
3.
Основні положення і результати побудови алгоритму що задає послідовність
елементарних перевірок.
5.
Висновки по роботі.
Контрольні питання
1.
На чому заснований інженерний метод?
2.
Проведіть порівняльний аналіз вивчених методів і визначте їх переваги і
недоліки
3.
Що таке функція переваги?
Завданння на
самостійну роботу.
|
|
1 2 3 4 5 |
|
|
6 7 8 |