14. ВИМІРЮВАННЯ МАГНІТНИХ ВЕЛИЧИН
Фізичні основи магнітометрії
Магнітометрія — наука про вимірювання параметрів магнітного поля.
Основні параметри магнітного поля - це магнітний потік,
магнітна індукція, напруженість магнітного поля. Магнітні матеріали оцінюють по
їх характеристиках та статистичних і динамічних параметрах.
У загальному випадку магнітне поле породжується рухом електричних зарядів (струмом) і характеризується напруженістю,
яка не залежить від властивостей середовища, а визначається лише геометричними розмірами контуру
та значенням струму в ньому
і може бути визначена на основі закону Біо-Савара-Лапласа. Наприклад, напруженість магнітного поля в центрі колового контуру радіусом R зі струмом
І дорівнює
![]() (А/м).
(А/м).
Магнітне
поле проявляється також у формі силової дії на рухомий електричний заряд.
Основною характеристикою силової взаємодії магнітного поля з електричним
струмом є магнітна індукція В. Це індукція такого однорідного магнітного поля,
в якому на кожний метр лінійного провідника зі струмом в один ампер діє сила в
один ньютон. Одиницею магнітної індукції є тесла (Тл). Ідукція магнітного поля
у вакуумі: ![]() , в середовищі з відносною магнітною проникністю
μ:
, в середовищі з відносною магнітною проникністю
μ: ![]()
де μо = 4π-10-7
Гн/м - магнітна стала
Магнітне
поле проявляється також у вигляді явища електромагнітної індукції. Згідно із
законом електромагнітної індукції, змінне магнітне поле наводить в контурі
електрорушійну силу, значення якої визначається швидкістю зміни магнітного
потоку.
![]() , де Ф - магнітний потік, який дорівнює
сумарному потоку вектора магнітної
індукції через контур з площею
S:
, де Ф - магнітний потік, який дорівнює
сумарному потоку вектора магнітної
індукції через контур з площею
S: ![]() .
.
Іншою
інтегральною характеристикою магнітного поля є магніторушійна сила МРС,
значення якої між двома точками А і В визначається як:
![]() .
.
Вимірювані магнітні велиичини в
основному попередньо перетворюються в електричні, зручні для вимірювання.
Перетворювачі магнітних величин використовують гальваномагнітні явища, явища
електромагнітної індукції, зміни магнітного стану феромагнетика в магнітному
полі, квантові явища та силову взаємодію досліджуваного поля з полем постійного
магніту або контуру з електричним струмом.
Явище
електромагнітної індукції покладене в основу принципу дії індукційних та
феромодуляційних вимірювачів магнітного потоку.
1. Принцип дії індукційних перетворювачів заснований
на явищі електромагнітної індукції: виникненні ЕРС у вимірювальній котушці при
зміні магнітного потоку Ф, що пронизує витки котушки (рис. 1):
![]() , де Ψ = wФх - повний магнітний потік
(потокозчеплення), w -
кількість витків вимірювальної котушки; а - кут між напрямом магнітного поля та
нормаллю до площини витків вимірювальної котушки
, де Ψ = wФх - повний магнітний потік
(потокозчеплення), w -
кількість витків вимірювальної котушки; а - кут між напрямом магнітного поля та
нормаллю до площини витків вимірювальної котушки
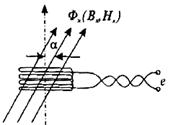
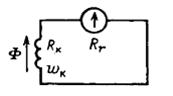
Рис 1.
Вимірювальна котушка в магнітному полі
Індукційні перетворювачі використовують в засобах для вимірювань як в сталих, так
і в змінних магнітних полях. У першому випадку зміну потокозчеплення
досліджуваного потоку з витками вимірювальної котушки можна здійснити швидким
винесенням котушки за межі досліджуваного магнітного поля. При цьому зміна потокозчеплення за інтервал часу між моментами початку tп та кінця
tк винесення котушки за межі полі дорівнюватиме
![]() ,
,
де І -
струм, q - кількість електрики, R= Rк + Rг - опір вимірювального кола,
включаючи опір котушки та вихідного
вимірювального приладу.
При Фк = 0
буде ![]() а отже, значення
вимірюваного потоку Фх може бути перетворене в імпульс ЕРС або імпульс струму.
а отже, значення
вимірюваного потоку Фх може бути перетворене в імпульс ЕРС або імпульс струму.
Вимірювання
імпульсу струму здійснюється за допомогою балістичного
гальванометра. Під час протікання через рамку гальванометра
короткочасного імпульсу струму, максимальна амплітуда відхилення вказівника
гальванометра (балістичне відхилення): ![]() , де
, де ![]() і
і ![]() - балістична чутливість і
ціна поділки. Тоді
- балістична чутливість і
ціна поділки. Тоді ![]() - ціна поділки
балістичного гальванометра по потокозчепленню.
- ціна поділки
балістичного гальванометра по потокозчепленню.
Вимірявши балістичним
гальванометром ΔΨ=wФх, і знаючи кількість витків в котушки, можна знайти і значення
вимірюваного потоку: ![]() .
.
При рівномірному обертанні
вимірювальної котушки з кутовою швидкістю ω=2πf в ній наводиться ЕРС, яка змінюється за
синусоїдним законом: ![]() ,
,
де а - кут
між напрямом вектора магнітної
індукції та віссю обертання рамки (котушки).
Перетворювачі з обертальною
котушкою мають коефіцієнт перетворення до декількох сот вольт на тесла і
забезпечують перетворення магнітної індукції від 10-4 до 10 7
Тл з похибкою до 0,1%. Недоліком таких
перетворювачів є наявність двигуна для забезпечення обертального руху вимірювальної
котушки.
Якщо досліджуване магнітне поле
рівномірне, тобто Фх = BxS, а у випадку, коли магнітна проникність середовища у всіх точках простору охопленого контуром
витків вимірювальної котушки однакова, тобто Фх =μμoSHx, то наведена у
вимірювальній котушці ЕРС може бути мірою не тільки магнітного потоку, але і
магнітної індукції та напруженості магнітного поля.
Для вимірювань сталого
магнітного потоку індукційно-імпульсним методом існують спеціальні вимірювачі магнітного потоку - веберметри. Магнітоелектричний
вимірювальний механізм веберметра
відрізняється від звичайних магнітоелектричних механізмів тим, що в
нього відсутні протидіючі пружини.
Струм до
рамки підводиться за допомогою "безмоментних" струмопідводів
(струмопідводів з дуже незначним протидіючим моментом). У таких випадках
відхилення рухомої частини пропорційне ЕРС, що наводиться в під'єднаній до
рамки вимірювальній котушці при зміні її повного потокощеплення з вимірюваним
магнітним потоком Фх-
![]() ,
,
де w -
кількість витків вимірювальної котушки; SФ -
чутливість приладу до потоку.
Отже,
відхилення вказівника веберметра пропорційне вимірюваному потоку практично не
залежить від опору вимірювального кола, 10... 50 Ом.
Значно
чутливішими і такими, покази яких не залежать в значно ширших межах від опору
зовнішього кола (до 500... 1000 Ом), є фотогальванометричні веберметри. Нижня
межа вимірювань таких приладів становить одиниці мікровебер при зведеній
похибці 1... 1,5%.
Фотогальванометричний веберметр являє собою веберметр з фото-гальванометричним
підсилювачем, що має від'ємний зворотний зв'язок по похідній вихідного струму,
котрий здійснюється за допомогою RC-ланки (рис. 2). Принцип дії приладу такий.
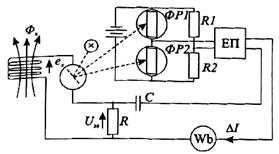
Рис. 2
Принципова схема фотогальванометричного веберметра
При зміні
потокозчеплення з вимірювальною котушкою виникає ЕРС під дією якої в колі
магнітоелектричного гальванометра протече струм і спричинить відхилення рухомої
частини. Промінь світла від дзеркальця гальванометра змінить освітленість
фоторезисторів ФРІ та ФР2, що приведе до розбалансу мостового кола, утвореного
з названих фоторезисторів та резисторів R1 і R2. Напруга розбалансу
підсилюється і подається в коло І зворотного зв'язку, в результаті чого на
виході диференціювальної RC-ланки виникне напруга зворотного зв'язку,
пропорційна швидкості зміни струму І.
Зміна
струму буде відбуватись до тих пір, поки напруга зворотного зв'язку не
зрівноважить ЕРС, яка наводиться у вимірювальній котушці, тобто до моменту рівності: ![]() або
або ![]() , звідки
, звідки
![]()
При винесенні котушки за поле
![]() .
.
Завдяки використанню від'ємного
зворотного зв'язку вхідний опір фотогальвано-метричного підсилювача
збільшується, що дозволяє використовувати вимірювальні котушки з досить високим
опором (100...200 Ом).
2) У феромодуляційних
перетворювачах модуляція потокозчеплення здійснюється за рахунок зміни
магнітної проникності феромагнетика, з якого виготовлене осердя.
Найпоширенішими
феромодуляційними перетворювачами є перетворювачі з поздовжнім магнітним
збудженням. Такі ферозонди (рис. 3) мають два ідентичні пермолоєві осердя 1 і 2 з
нанесеними на них намагнічувальними обмотками w1 та w1′, увімкненими послідовно-зустрічно. Вимірювальна обмотка 3 охоплює
обидва стержні. Амплітуда напруженості намагнічувального поля повинна бути
значно більшою напруженості досліджуваного поля і достатньою для намагнічування
стержня до насичення.
При повній
ідентичності обох половин ферозонда і відсутності досліджуваного поля ЕРС що
наводиться у вимірювальній обмотці дорівнює нулю. При наявності досліджуваного
поля, напрямленого вздовж стержнів, симетрія потоків порушується, а у
вимірювальній обмотці наводиться ЕРС парних гармонік (непарні віднімаються):
![]() ,де
,де![]() -
-
амплітуда другої гармоніки
диференціальної магнітної проникності, а ![]() - кут між вектором
досліджуваного поля і напрямом осі ферозонда.
- кут між вектором
досліджуваного поля і напрямом осі ферозонда.
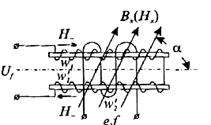
Рис. 3.
Диференційний ферозонд
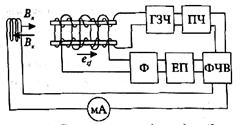
Рис.4.
Тесламетр
На рис. 3
наведена структурна схема феромодуляційного
тесламетра.
Намагнічувальна
обмотка фероіндукційного перетворювача (ферозонду) живиться від генератора
звукової частоти ГЗЧ, створюючи змінне магнітне поле 2L. При накладанні на
змінне поле В вимірювального поля Вх у вимірювальній обмотці наводиться ЕРС,
друга гармоніка якої через фільтр Ф подається на підсилювач і після підсилення
— на вхід фазочутливого випрямляча ФЧВ, який живиться від цього ж генератора
ГЗЧ через подвоювач частоти ПЧ.
Для
підвищення точності в цих приладах використовують компенсаційний метод
вимірювань, при якому вимірюване магнітне поле компенсується однаковим за
модулем з вимірюваним і протилежним за знаком компенсувальним полем Вк. Для
створення; компенсувального поля постійний струм з виходу фазочутливого
випрямляча надходить на компенсувальну обмотку і створює компенсувальне
поле. В коло зворотного зв'язку
увімкнений міліамперметр, шкала якого проградуйована в одиницях вимірюваної
величини.
Феромодуляційний
метод, характеризується високою чутливістю та малими розмірами, широко
використовується для вимірювань параметрів слабих сталих та низькочастотних
магнітних полів в діапаазоні 10-9
до 10 -4 Тл зокрема при
дослідженнях магнітного поля Землі, з похибкою 1...2%.
В основу
побудови первинних перетворювачів магнітної індукції можуть бути покладені
гальваномагнітні ефекти Гаусса та Холла.
Суть ефекту Холла полягає у виникненні поперечної різниці потенціалів (ЕРС
Холла) на бічних гранях розміщеної в магнітному полі напівпровідникової
пластинки при проходженні по ній
струму І (рис. 5).
Значення ЕРС Холла: ![]() ,
,
де В -
вимірювана індукція; Rh - коефіцієнт Холла, значення якого залежить від природи
матеріалу чутливого елемента; d - його товщина.
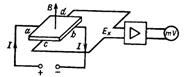
Рис.5 Ефект Холла
Суть гальванорезистивного ефекту (ефекту Гаусса) полягає в зміні питомого електричного опору
гальваномагнітного елемента (магніторезистора) під дією магнітного поля:
![]()
де ро —
питомий електричний опір напівпровідника при відсутності поля; Аф — коефіцієнт, що залежить від форми магніторезистора;
показник степеня m = 2 для слабких магнітних полів (переважно В <
0,2...0,4 Тл), для яких виконується умова μВ<1 і m = 1 для
сильних магнітних полів, коли μВ>>1.
Тоді функція
перетворення магніто-резистивного перетворювача можна апроксимувати виразом: ![]() .
.
Характер залежності
опору від магнітної індукції визначається фізичними властивостями матеріалу
перетворювача, а також його формою.
Гальваномагнітні ефекти Холла
та Гаусса лежать в основі принципу дії відповідно магнітогенераторних та
магніторезистивних перетворювачів і вимірювальних приладів на їх основі.
Поєднання перетворювачів Холла,
з цифровими мілівольтметрами та мікропроцесорними пристроями для корекції
похибок забезпечують створення одно- та багатоканальних тесламетрів для
вимірювань магнітної індукції сталого та змінного магнітного поля в межах 10-2...
10 Тл з похибкою 0,2...0,5% в діапазоні
температур 4. ..400К.
Принцип
дії квантових перетворювачів
магнітних величин заснований на використанні явища магнітного резонансу.
Магнітний резонанс зумовлений взаємодією мікрочастинок (ядер, електронів,
атомів, молекул), які мають власний магнітний момент і момент кількості руху
(спін), із зовнішнім магнітним полем. В результаті такої взаємодії
спостерігається вибіркове поглинання або випромінювання речовиною електромагнітних
хвиль певної довжини.
Якщо на
мікрочастинку з магнітним моментом Мі діяти змінним магнітним полем, спрямованим під деяким кутом до вектора Мі, з індукцією Вf і регульованою частотою f, то при деякому значення частоти буде виникає резонансне поглинання
високочастотної енергії зразком. Резонансна частота рівна:
![]() , де
, де
γ -
гіромагнітне відношення (відношення магнітного моменту до механічного моменту
кількості руху) стале для даного виду атомів.
Вимірявши
частоту прецесії (електромагнітних коливань), можна з високою точністю
визначити значення індукції магнітного поля.
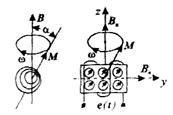
Внаслідок
хаотичної орієнтації магнітних моментів окремих частин сумарний магнітний момент
М дорівнює 0. Дія зовнішнього магнітного поля приводить орієнтації сумарного
магнітного моменту М в одиниці об'єму речовини в напрямі поля Вх тобто до
намагніченості. Для спостереження сигналу прецесії необхідно відхилити сумарний
момент М від напряму поля Вх иа деякий кут а, тобто поляризувати мікрочастинки.
З цією метою використовують поляризувальне поле Вn. (рис. 6).
Залежно
від того, які частинки робочої речовини резонують, існує декілька різновидів
магнітного резонансу: ядерний магнітний резонанс (ЯМР) електронний
парамагнітний резонанс (ЕПР), феромагнітний та ін.
Поляризаціюю
мікрочастки можна здійснювати різними способами: дією сильного магнітного поля,
опроміненням робочої речовини електромагнітним полем, тощо
Метод
ядерного резонансного поглинання (вимушеної ядерної прецесії) заснований на явищі
поглинання ядрами енергії високочастотного зовнішнього поля, що діє на робочу
речовину одночасно з дією вимірюваного сталого
магнітного поля.
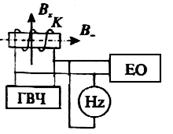
Рис.7.
ЯРП
Принцип
дії ядерного резонансного перетворювача пояснює рис. 7. Зразок (ампула з водою) розміщується в середині котушки. Якщо на вимірюване стале магнітне поле Вх накласти під
кутом 90° високочастотне змінне поле що створюється генератором високої частоти
ГВЧ з регульованою частотою. Плавна зміна частоти ГВЧ дозволяє
встановити частоту f, при якій спостерігається ЯМР. При цьому відбувається поглинанням атомами речовини енергії змінного поля, що
приводить до зменшення напруги на затискачах котушки. Отже, в момент резонансу вихідна напруга генератора
мінімальна, що фіксується за
допомогою електронного осцилографа ЕО. Частота f визначається
вимірюванням частоти генератора.
Вимірювання параметрів магнітних полів методом
компарування (опосередкованого порівняння)
Метод
компарування (метод опосередкованого порівняння) заснований на порівнянні цих
чи інших проявів магнітного поля або ефектів (ЕРС Холла, ЕРС індукції,
магніторезистивний ефект і ін.), пропорційних вимірюваній величині та зразкової
величини, що створюється мірою. Такі вимірювання проводились, наприклад, при
визначенні параметрів магнітних полів з великою неоднорідністю, в широкому
діапазоні температур, при необхідності точного вимірювання середніх та сильних
змінних магнітних полів (для останніх відсутні точні міри).
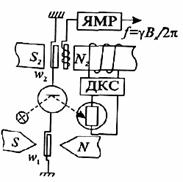
Рис.8
Принципова схема електромеханічного компаратора магнітних вимірювань
Як і для
електричних величин, компаратори для вимірювань магнітних величин поділяють на
компаратори одночасного порівняння та компаратори різночасного порівняння. В
перших використовують два ідентичні за принципом дії та параметрами
компарувальні перетворювачі, один з яких розміщають в досліджуваному магнітному
полі, інший - в магнітному полі, що створюється багатозначною мірою. При
різночасному компаруванні один і цей самий перетворювач розміщають почергово в
досліджуване і зразкове поля.
На рис.8 наведена схема електромеханічного компаратора
одночасного порівняння для вимірювань параметрів неоднорідних магнітних систем
зі сталими магнітами.
Як
багатозначна міра магнітної індукції тут використовується електромагніт,
магнітна індукція в повітряному проміжку якого вимірюється за допомогою
ЯМР-тесламетра. Необхідне значення магнітної
індукції створюється струмом від джерела керованого струму ДКС, значення
струму якого керується сигналом від перетворювача недокомпенсації (світловим по
нем на фоторезисторі ФР).
У
компараторі порівнюються обертальні моменти магнітоелектричних механізмів рамка
одного з яких розміщена в досліджуваному полі NS, а рамка іншого — в
однорідному магнітному полі міри.
При
відомих параметрах рамки можна знайти магнітний потік, що перетинає площу рамки
(за умови, що всі витки цієї рамки мають однакову площу
![]()
![]()