7.2.
Завдання для засвоєння практичного курсу
Завдання
№ 1. Складання
структурних схем за диференційними рівняннями та їх системами для розрахунку із
застосуванням спеціалізованих математичних пакетів
Мета:
1. складання структурної схеми диференційного рівняння другого порядку та його
дослідження,
2. складання структурної схеми системи
диференційних рівнянь.
Теоретичні відомості
Математичний
опис великого класу задач виконується за допомогою диференційних рівнянь. Під
час вирішення задач за допомогою структурного моделювання найчастіше
використовують метод зниження порядку похідної.
Розглянемо
метод зниження порядку похідної на прикладі вирішення диференційного рівняння
2-го порядку з постійними коефіцієнтами:
![]() ,
,
де ![]() ,
, ![]() ,
, ![]() - постійні числа
більші 0;
- постійні числа
більші 0; ![]() - постійне число чи
функція часу, тобто
- постійне число чи
функція часу, тобто ![]() - примусова функція.
- примусова функція.
Вирішимо
рівняння відносно вищої похідної:
![]() ,
,
де 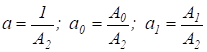 .
.
Таким чином, друга похідна дорівнює сумі всіх інших членів
рівняння.
Структурна
схема складається з комплексу операційних блоків, з'єднавши котрі певним чином,
можна одержати рішення задачі.
Рішення
диференційного рівняння у формі структурної схеми має вигляд, наведений на
рис.7.1.
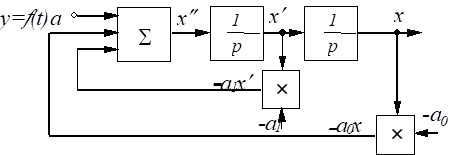
Рис.7.1. Структурна схема рішення диференційного рівняння
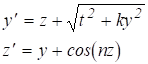
Метод
зниження порядку похідної аналогічним чином можна застосувати і для вирішення
систем диференційних рівнянь. Розглянемо складання структурної схеми для
системи диференційних рівнянь, що відповідає електричній машині постійного
струму незалежного збудження, що записана у відносних одиницях:
![]() ;
;
![]() .
.
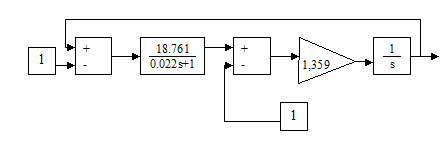
Структурну
схему отримаємо послідовним з’єднанням пропорційних, сумуючих і інтегруючих
блоків.
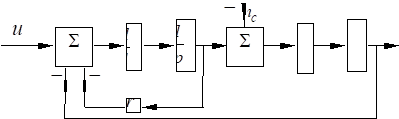
Рис. 7.2. Структурна схема
вирішення системи 2-х диференційних рівнянь
Порядок виконання роботи
1. Використовуючи структурну схему (рис.7.1), знайти рішення
диференційного рівняння для значень коефіцієнтів, що задані викладачем.
2. Дослідити перехідний процес і підібрати параметри рівняння таким
чином, щоб отримати: аперіодичний процес, аперіодичний процес другого порядку,
незатухаючі коливання.
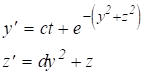
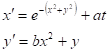
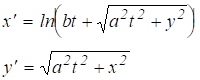
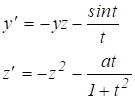
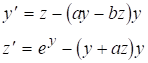
3. Для системи диференційних рівнянь, що задана викладачем
(табл.7.1), скласти структурну схему моделі і знайти рішення.
Таблиця 7.1. Системи диференційних рівнянь для розрахунку
|
№ з/п |
Система диференційних рівнянь |
Параметри |
Кінцевий час розрахунку |
Початкові умови |
|
1.
|
|
|
|
|
|
2.
|
|
|
|
|
|
3.
|
|
|
|
|
|
4.
|
|
|
|
|
|
5.
|
|
|
|
|
|
6.
|
|
|
|
|
|
7.
|
|
|
|
|
|
8.
|
|
|
|
|
|
9.
|
|
|
|
|
|
10. |
|
|
|
|
|
11. |
|
|
|
|








Зміст звіту
1. Теоретичні відомості
2. Структурні схеми моделей
3. Результати рішення в
графічному вигляді
4. Висновки.
Завдання № 2. Моделювання механічної системи з пружностями
Мета роботи: дослідження
механічної системи з пружностями без урахування та з урахуванням
зазору в механічній передачі
Теоретичні положення
Розглянемо
механічну двомасову систему з урахуванням пружностей механічних з’єднань за структурною схемою
рис.7.3.
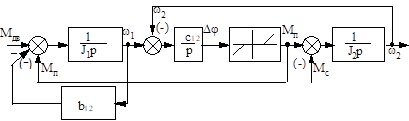
Рис. 7.3. Структурна схема двомасової системи з урахуванням пружностей
Часто
впливом моменту внутрішнього тертя на валу, що деформується, можна знехтувати,
оскільки істотнішим виявляється момент зовнішнього
тертя, викликаного навантаженням.
Найбільші
труднощі під час моделювання має розрахунок пружностей
механічних з’єднань. Розрахунок деяких коефіцієнтів ![]() можна виконати за
такими виразами:
можна виконати за
такими виразами:
1. для
сталевих валів
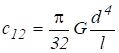 ,
,
де ![]() кг/см2;
кг/см2; ![]() Н/м2;
Н/м2; ![]() - діаметр і довжина вала, см;
- діаметр і довжина вала, см;
2. для
сталевих канатів (лінійна деформація) під час багаторазового підйому
 ,
,
де ![]() - довжина каната, м;
- довжина каната, м; ![]() - запас пружності каната.
- запас пружності каната.
Структурна
схема моделі під час використання розширення пакета MATLAB - SIMULINK наведена
на рис.7.4. У схему введений елемент, що дозволяє врахувати наявність зазору в
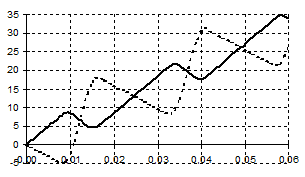
кінематичному колі. На рис. 7.5-7.6 наведені приклади розрахунків коливань
кутових швидкостей: ѕ
кутова швидкість першої маси; ‑ ‑ ‑ кутова швидкість другої
маси, на рис.7.5 без урахування зазору, на рис.7.6 з урахуванням зазору.
Дуже
важливим є добір кроку інтегрування, оскільки від цього залежить обсяг
обчислень і точність отримуючого результату.
Орієнтиром у цьому питанні можуть бути динамічні властивості системи, що
визначається резонансними частотами:
 .
.
Для тримасової механічної системи визначається також частота
вільних коливань під час взаємодії другої та третьої мас:
 .
.
Для
кожного коливання потрібно розрахувати не менше як 25-30 точок, тобто крок
інтегрування вважається таким:
 ,
,
де ![]() - більша з частот.
- більша з частот.
Рис.7.4.
Структурна схема моделі в пакеті MATLAB - SIMULINK
|
Рис. 7.5.Приклад розрахунку кутових швидкостей без урахування зазору |
Рис.7.6. Приклад розрахунку кутових швидкостей з
урахуванням зазору |
Порядок виконання роботи
1. Розрахувати
коефіцієнти структурної схеми та частоту коливань системи за даними викладача.
2. У
пакеті MATLAB - SIMULINK набрати структурну схему моделі без урахування зазору
та виконати її розрахунок.
3. Ввести
до структурної схеми ланку, що обумовлює наявність зазору. Виконати розрахунок
динамічних режимів системи.
4. Порівняти
отримані результати і зробити висновки.
Таблиця 7.2. Вихідні дані
для розрахунку
|
Тип збурення |
Механічне з’єднання |
||
|
Послідовне |
змішане |
незалежне |
|
|
Рн, кВт |
61 |
57 |
56 |
|
Iн, A |
325 |
295 |
290 |
|
nн, рад/с |
480 |
590 |
610 |
|
Опора якоря Rя, Ом |
0,0212 |
||
|
кіл. полюсів: головних/додаткових |
4/4 |
||
|
Кількість витків на полюс |
27 |
5 |
1145 |
|
Опор обмотки збурення |
0,0205 |
0,0041 |
42 |
|
Опор паралельної обмотки |
- |
49,2 |
- |
|
Ном. струм збурения, А |
- |
3,12 |
3,6 |
|
Момент інерції, кг м2 |
1,875 |
||
Зміст звіту
1. Таблиці
вихідних даних
2. Розрахунки
коефіцієнтів і частот коливань
3. Структурні
схеми варіантів досліджень
4. Графіки
динамічних режимів кутової швидкості обох мас і моментів варіантів досліджень.
5. Висновки.
Завдання № 3. Розрахунок перехідних характеристик на моделі та
визначення параметрів передаточної функції електромеханічної системи.
Мета роботи: визначення параметрів
передаточної функції за даними перехідних характеристик.
Теоретичні відомості
Для аналізу і синтезу
систем електроприводів необхідно знати їх математичні моделі. Вибір
математичної моделі залежить від певних умов, найважливішими з яких є: мета дослідження;
необхідна точність опису реального процесу; критерій адекватності моделі та
об'єкта; ступінь вивченості фізичних явищ процесу. У інженерній практиці часто
обмежуються зображенням об'єкта у вигляді «чорного ящика», для якого знаходять
зв'язок між входом і виходом. Таке знаходження зв'язків
за експериментальними даними називають ідентифікацією.
За даними ідентифікації визначають параметри і структуру «чорного ящика»
об'єкта.
Виділяють
п'ять основних методів визначення моделі об'єкта на основі:
-
реакції об'єкта на детермінований вхідний
сигнал (одиничний стрибок або імпульс);
-
частотних характеристик, отриманих у всталеному режимі для синусоїдального вхідного сигналу;
-
моделювання на ЕОМ під час подальшого
уточнення параметрів моделі;
-
кореляції аналізу входу і виходу;
-
підстроюваної динамічної моделі, (моделі як датчика характеристик об'єкта).
Метою
ідентифікації будемо вважати одержання математичного опису об'єкта у вигляді
його передаточної функції на основі експериментальної перехідної
характеристики.
Процес
ідентифікації об'єкта складається з чотирьох основних етапів:
-
планування і підготовки експерименту,
проведення експерименту,
-
обробки результатів експерименту, що полягає в
згладжуванні отриманої перехідної характеристики,
-
апроксимації її передаточної функції,
-
перевірки адекватності отриманої моделі
реальному об'єкту.
Переважаюча
кількість об’єктів у системах електропривода мають перехідну характеристику, що
відповідає аперіодичній залежності другого порядку. При цьому залежно від
характеру процесу для відтворення параметрів передаточної функції
використовують ті чи інші методи.
Для
виконання завдання необхідно використовувати наступні методи згідно з отриманим
характером процесу:
1. для
аперіодичної перехідної характеристики першого порядку:
а)
метод дотичної;
б)
метод двох точок.
2. для
аперіодичної перехідної характеристики другого порядку:
а)
метод інтервалів;
б)
метод дотичної.
3. для
коливальної перехідної характеристики:
а)
коливальна ланка (спосіб 1);
б)
коливальна ланка (спосіб 2).
Методики розрахунку за
вказаними методами наведені в літературі [2-7].
Порядок виконання роботи:
1. За диференційним
рівнянням (або системою рівнянь), табл. 7.3. скласти структурну схему та
розрахувати перехідну характеристику.
Таблиця 7.3. За системою диференційних рівнянь скласти
структурну схему
|
№ з/п |
Система диференційних рівнянь |
Параметри |
Кінцевий час розрахунку |
Початкові умови |
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
|
5 |
|
|
|
|
|
6 |
|
|
|
|
|
7 |
|
|
|
|
|
8 |
|
|
|
|
|
9 |
|
|
|
|
|
10 |
|
|
|
|
|
11 |
|
|
|
|










2. У
пакеті MATLAB - SIMULINK набрати структурну схему моделі та виконати
розрахунок.
3. Згідно запропонованого
методу визначення параметрів передаточної функції виконати розрахунки
коефіцієнтів і сталих часу.
4. Розрахувати
перехідну характеристику, використовуючи
отримані результати.
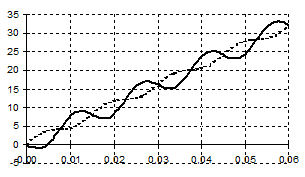
5. Побудувати
задану та відтворену перехідні характеристики на одному графіку. Знайти
розбіжності та встановити похибку.
Зміст звіту:
1. Вихідні
дані.
2. Розрахунки
коефіцієнтів.
3. Структурні
схеми досліджень.
4. Графіки
динамічних режимів наданої та відтвореної перехідної характеристик.
5. Висновки.
![]()
![]()