5.2.Оптимізація об´єкта з неповною
інформацією
Для оптимізації об´єкта з неповною
інформацією (ОНІ) – застосовують також алгоритми, але з
використанням ЗЗ, який у цих системах застосовують чи лише для корегування
траєкторії х(t) (керування з С-моделлю), чи крім траєкторії
корегуються також параметри моделі (керування з А-моделлю). Керуючий пристрій в
цій системі (рис.5.1) містить блок оцінювання змінних стану (БОЗС), блок
корекції (БК), математичну модель (ММ) і блок оптимального керування (БОК).
Однією з основних у таких системах є задача оцінювання вектора
стану об’єкта, яку виконує блок БОЗС. Необхідність використання цього блоку
пов’язана, насамперед, з тим, що кількість вимірювальних змінних, як правило,
менша за кількість компонент вектора стану.
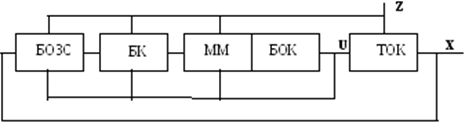
Рис. 5.1. Система оптимізації об´єкта з неповною
інформацією
Для оптимізації погано визначених об´єктів
(ПВО) будують системи з пошуковими
алгоритмами. Пошукові методи широко використовують в задачах нелінійного
програмування (НП), коли і критерій і обмеження нелінійно
залежать від вхідних змінних або їх важко обчислити.
![]()
![]()