Тема: Органи керування тракторами й автомобілями
1. Загальні відомості про керування колісними машинами.
2. Гальмівні системи автомобілів і колісних тракторів.
1. Загальні відомості про керування колісними машинами. Системи керування колісною або гусеничною машиною призначені для зміни напрямку руху машини, зменшення швидкості її руху, зменшення швидкості її руху до повної зупинки , а також для утримання зупиненої машини на місці. У колісних машин до систем керування належать рульове керування і гальмівні системи, у гусеничних – механізм повороту, який поєднує обидві системи – керування та гальмівну.
Рульове керування призначене для забезпечення руху трактора (автомобіля) за заданим водієм напрямком.
Рульове керування повинно бути легким і зручним, для чого зусилля на рульовому колесі і кут його повороту повинні бути обмеженими. Крім цього, необхідно, щоб рульове керування забезпечувало правильну кінематику повороту і безпеку руху, а поворот коліс проходив так, щоб їх кочення не викликало проковзування відносно опорної поверхні.
Рульове керування складається із рульового механізму та приводу. Рульовий механізм збільшує зусилля, що передається від рульового колеса на рульовий привід.
Рульовий привід передає зусилля від рульового механізму до цапф напрямних коліс і складається із сошки, поздовжньої тяги, рульової трапеції. Рульова трапеція утворюється передньою віссю, поперечними рульовими тягами та рульовими важелями лівої та правої цапф. Трапеція забезпечує поворот цапф напрямних коліс на різні кути, чим створюються умови кочення коліс без проковзування. Внутрішнє колесо повертається на більший кут, оскільки розміщене на меншому радіусі повороту від центру повороту і проходить менший шлях, а зовнішнє колесо повертається на менший кут.
Керування може бути тільки передніми колесами, відповідно, тільки переднього моста, а також передніми і задніми колесами відносно їх мостів. Керування відносно мостів трактора називають гідромеханічним.
Залежно від розміщення рульового колеса розрізняють праве і ліве керування (основне). При правосторонньому русі транспорту по дорогах ліве рульове керування дозволяє мати кращий огляд шляху.
Рульові приводи можуть бути механічними, гідравлічними й електричними. У тракторів і автомобілів з передніми керованими колесами, механічний привід передає зусилля сошкою 2 (рис. 11) до поворотних важелів 5, 7 рульової трапеції. Рульова трапеція є частиною рульового приводу.
Як рульові механізми використовуються передачі черв’як-ролик, черв’як-сектор, гвинт з гайкою, рейка із зубчастим сектором, конічні передачі.
За взаємним розміщенням рульового колеса і рульового механізму розрізняють рульове керування з суміщеним (рис. 11, а) або роздільним(рис.11, б)рульовим колесом і рульовим механізмом.
При суміщеному рульовому керуванні ведучий елемент рульового механізму 3 встановлюється на нижньому кінці вала рульового колеса 1, а при роздільному – з’єднується з ним через карданну передачу.
Залежно від місця розміщення рульової трапеції відносно керуючого моста розрізняють рульові приводи з переднім і заднім розміщенням трапеції.
Рульове керування оснащують підсилювачами рульового приводу, які призначені для створення додаткового зусилля, з метою полегшення керування машиною. Найбільш поширені підсилювачі гідравлічного і пневматичного типу.
Як правило, гідропідсилювач має окрему гідравлічну систему, яка включає в себе: насос 9 (рис. 12), розподільник і силовий циліндр.
Рис.11. Типи рульового керування:а – рульове керування з поєднаним рульовим колесом і механізмом, суцільною трапецією і механічним приводом; б – рульове керування з розділеними рульовими колесом і механізмом, розчленованою трапецією і механічним приводом з гиропідсилювачем: 1 – рульове колесо: 2 – сошка: 3 – рульовий механізм; 4, 6 – відповідно поздовжня і поперечна тяги; 5. 7– поворотні важелі; 8 – цапфа коліс; 9 – карданна передача; 10 – гідропідсилювач: 11 – поворотний вал.
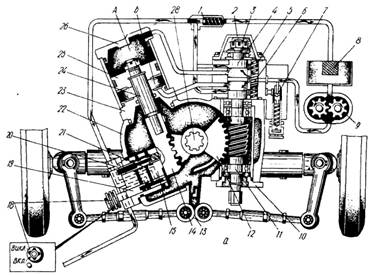
Рис. 12. Схема роботи гідропідсилювача рульового керування: А, Б – відповідно, безштокова і штокова порожнини циліндра; 1 – редукційний клапан; 2 – кришка розподільника; 3 – гайка; 4– золотник; 5 – повзун; 6 – центруюча пружина; 7 – запобіжний клапан; 8 – фільтр; 9 – насос; 10 – ексцентрична втулка: 11 – черв'як; 12 – сектор; 13 – сошка; 14 – рейка: 15 – упор рейки; 16 – циліндр блокування; 17 – маслопровід датчика; 18 – маховичок крана; 19 – кран датчика; 20 – щуп; 21 – золотник датчика; 22– корпус гідропілсилювача; 23, 26 – відповідно, задня і передня кришки циліндра; 24, 25 – відповідно, шток і поршень гідро циліндра; 27 – маслопровід крана керування; 28– поворотний вал
При прямолінійному русі трактора або при русі з постійним радіусом повороту золотник 4 перебуває у нейтральному положенні й утримується трьома парами повзунів 5, розмішених під кутом 120°, що розпираються центруючими пружинами 6. Масло від насоса надходить до середньої нагнітальної виточки золотника, у зливні виточки і, далі через редукційний клапан 1 і фільтр 8, зливається у бак гідропідсилювача.
Під час повороту направо обертання рульового колеса через рульовий привід передається черв'яку 11. Якщо опір повороту напрямних коліс великий, витки черв'яка опираються на зубці загальмованого цим опором сектора 12. На черв'яку виникає осьове зусилля, яке перевищує зусилля стиску пружин 6, і черв’як переміщується вздовж осі, ковзаючи витками по зубцях сектора, як гвинт у нерухомій гайці. Разом з ним переміщується закріплений на його хвостовику золотник 4 у напрямку кришки 2. При цьому середній бурт на золотнику перекриває проходження масла у передню зливну виточку. Одночасно крайній бурт золотника перекриває вихід її з порожнини Б циліндра у нижню зливну виточку на корпусі розподільника. Другий крайній бурт золотника, навпаки, збільшує прохідний переріз для зливання масла з порожнини А циліндра у виточку на корпусі розподільника. Вона із середньої нагнітальної виточки по магнітопроводу надійде у порожнину Б циліндра. Під дією різниці тисків масла у порожнинах гідроциліндра поршень 25, разом зі штоком 24 і рейкою 14, повертатиме вал 28 і сошку 13 вліво (по ходу трактора), а сошка (через тяги рульової трапеції) поверне напрямне колесо вправо. Одночасно сектор 12 перемістить черв'як із золотником у бік нейтрального положення, цьому допомагає й сила центруючих пружин 6. Якщо припинити обертання рульового колеса, поворот напрямних коліс також припиниться. Для його продовження потрібно обертанням рульового колеса в бік повороту трактора не давати золотнику вийти з робочого положення.
Аналогічно відбувається і поворот вліво.
Гідромеханічне рульове керування складається із гідравлічної та механічної частин. Перша призначена для повороту напіврам, друга – для керування поворотом і здійснення зворотного зв’язку. До гідравлічної частини належать насос 10 (рис. 13), клапан витрати 6, розподільник 5, запірний клапан 4, два циліндри 1, бак із фільтрами 9 та 8, а також трубопроводи для з’єднання гідравлічних вузлів. До механічної – рульова колонка, рульовий механізм та тяга 11 зворотного зв’язку. Гідравлічний насос одержує привод від двигуна, а при не працюючому двигуні – від ходових коліс трактора через шестерні роздавальної коробки.
За цільовим призначенням насоса, підсилювачі ділять наавтономної(для одного підсилювача) ісумісної дії (для різних споживачів, в тому числі і підсилювача).
Нові конструкції об’ємного гідравлічного рульового керування (ОГРУ) виконуються по двох типових схемах: одноконтурними і двоконтурними.
Загальною умовою повороту є кочення коліс без ковзання, оскільки це ускладнює поворот і прискорює знос шин. Для цього необхідно щоб геометричні вісі всіх коліс перетинались в миттєвому центрі обертання – т.О (рис. 14), який називається центром повороту колісної машини.
Під час повороту машини навколо т. О, кожне колесо розміщується у площині дотичній до кола, а радіус обертання перпендикулярний площині колеса.
Віддаль від центра повороту О до середини моста О1 називається радіусом повороту R. Мінімальний радіус кола R1, описаного найбільш віддаленою точкою від центра повороту, називається радіусом горизонтальної прохідності.
Радіус повороту для випадку, коли машина має лише передні керуючі колеса – R=(ctg α + ctg β )·L / 2 .
У випадку, коли β=α=0, тобто для одного керуючого колеса – R=L ctgα.
Для шарнірної рами значення радіусу дорівнює – R= L/2tg α/2.
Радіуси R і R1 залежать від навантаження на гаку трактора і застосування гальм.
Для легкого керування необхідно правильно вибрати передатне число рульового керування. Чим більше передатне число, тим на менший кут відхиляються керуючі колеса при повному повороті рульового колеса і тим менше зусилля необхідне для повороту керованих коліс. Відповідно, чим більше навантаження на передні колеса, тим більше необхідне зусилля для повороту.
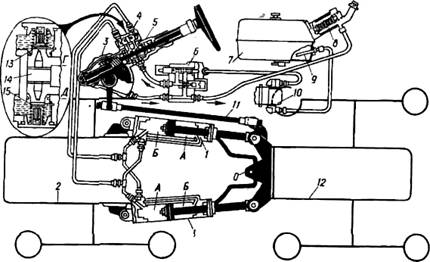
Рис.13. Схема гідромеханічного рульового керування трактора Т-150К:А, Б – порожнини гідроциліндра; Г, Д – канали; 1 – силові циліндри; 2, 12 – напіврами; 3 – рульовий механізм; 4, 9 – відповідно, запірний клапан та забірний фільтр; 5 – розподільник; 6 – клапан; 7 – бак; 8 – фільтр; 10 – насос; 11 – тяга зворотного зв'язку; 13, 15 – клапани; 14 – плунжер
Рис. 14. Кінематика повороту колісних машин
Для механізму рульового керування існує поняття стабілізації, розвалуі сходженнякеруючих коліс. Стабілізація керуючих коліс – це здатність коліс автоматично зберігати положення необхідне для прямолінійного руху трактора (автомобіля). Стабілізація коліс автомобіля досягається з допомогою поперечного і повздовжнього нахилів шворня (рис. 15).
в)
Рис. 15. Схеми встановлення передніх коліс і шворнів
Поперечний нахил шворня (рис. 15, а) визначається кутом β, який лежить в поперечній площині автомобіля. Величина цього кута для автомобілів становить 6...8º.
Поздовжній нахил шворня (рис. 15, б) визначається кутом γ, який утворений перпендикуляром до площини кочення колеса та віссю шворня (γ=0...8º).
Величина кутів нахилу шворнів визначається конструкцією опор, кулаків, вилок передніх мостів і в процесі експлуатації машини не регулюються..
Для легкого повороту і кочення керуючих коліс без ковзання, їх встановлюють під деякими кутами. Розрізняють кут розвалу α=2º, який лежить у поперечній площині трактора (автомобіля), та сходження керуючих коліс, яке визначається віддалями А і Б
(рис. 15, в), причому
А>
Б, і перебуває в межах 2...12 мм.
Механізм управління гусеничним трактором дещо відрізняється від механізмів керування колісними машинами.
Напрям руху гусеничних машин змінюють сповільненням швидкості руху внутрішньої щодо центра повороту (відстаючої гусениці). Швидкість руху другої (забігаючої) гусениці, залежно від механізму повороту, може залишатися незмінною або збільшуватися. При цьому, розрізняють два способи повороту: з нефіксованим та фіксованим радіусами повороту. При першому способі повороту відстаюча гусениця частково або повністю від’єднується від трансмісії – трактор виконує плавний або крутий поворот. Поворот трактора з фіксованим радіусом досягається включенням різної швидкості руху правої та лівої гусениць. Радіус повороту залежить від різниці швидкості руху гусениць: чим більша ця різниця, тим менший радіус повороту машини.
В механізм управління входять: важелі, педалі і тяги, за допомогою яких керують механізмами силової передачі із кабіни трактора. Дві педалі мають зв’язок із гальмами зупинки.
Два важелі (вертикальні) зв’язані з гальмами сонячних шестерень.
Крім цього, у гусеничного трактора може бути педаль або важіль головної муфти зчеплення, а також важіль збільшувача крутного моменту.
Важелі і педалі управління механізмами поворотів у вимкненому положенні фіксуються пружинами розтягу.
2. Гальмівні системи автомобілів і колісних тракторів. Гальмівна система є сукупністю пристроїв для зупинки машини. До гальмівної системи висуваються наступні вимоги: швидке спрацювання, правильний розподіл гальмуючого зусилля на колесах, забезпечення пропорційності між зусиллям на педалі і гальмуючою силою на колесах, плавність зупинки і стійкість машини, висока стабільність регулювання гальмівного механізму і хороше відведення тепла.
Розрізняють такі види гальмівних систем: робочу, статичну, допоміжну, запасну.
Для зменшення швидкості руху машини і її повної зупинки використовують два способи гальмування:
- гальмування з відєднаним двигуном;
- гальмування з використанням двигуна.
Гальмівна система складається з гальмівного механізму і гальмівного приводу.
Гальмівний механізм служить для безпосереднього створення і зміни штучного опору руху машини.
За типом робочих механізми гальм елементів бувають (рис. 16) стрічкові, дискові, колодкові, а за типом ведучого елемента – шківні (ДТ-75), барабанні, дискові(МТЗ-80).
Залежно від розташування гальма поділяють на колісні і трансмісійні (центральні). Перші діють на колесо, другі на один з валів трансмісії (МТЗ – два вали виведені із диференціалу).
Гальмівний приводслужить для передачі енергії до гальмівних механізмів і керування ними в процесі гальмування .
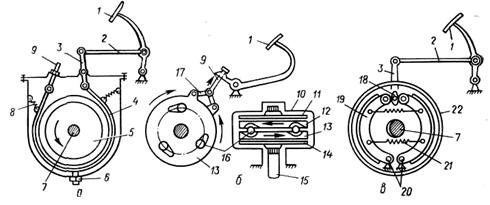
Рис. 16. Типи гальм: а – стрічкове; в – дискове; в – колодкове; 1– гальмова педаль; 2 – тяга педалі; 3 – важіль; 4 – гальмова стрічка; 5 – гальмовий шків; 6 – упорний регулювальний болт; 7 – ват; 8 – відтяжна пружина; 9 – регулювальна тяга; 10 – картер гальма; 11 – зовнішній обертовий диск; 12 – зовнішній розсувний диск; 13 – внутрішній розсувний диск; 14 – внутрішній обертовий диск; 15 – вал; 16 – розтискні кульки; 17 – серга; 18– розтискний кулак; 19 – гальмова колодка; 20 – вісь колодки; 21 – стяжна пружина; 22 – гальмовий барабан
За принципом дії розрізняють механічні, пневматичні, гідропневматичні (змішані) і електричні гальмівні приводи.
Механічний привід – система важелів і тяг, які з’єднують педаль або важіль керування з гальмівним механізмом.
У гідравлічному та пневматичному приводах гальмівні механізми приводяться в дію від тиску гальмівної рідини або стиснутого повітря.
Пневматичні і гідравлічні приводи можуть бути одно-, дво-і багатоконтурними. Одноконтурний привод здійснює керування гальмівними механізмами передніх і задніх коліс, але при порушенні герметичності в одному місці виходить з ладу вся система.
Двоконтурний привод має незалежні приводи гальмівних механізмів передніх і задніх коліс, що значно підвищує надійність гальмівної системи.
Багатоконтуриий привод – сукупність незалежних приводів робочих гальмівних механізмів, окремо передніх і задніх коліс, стоянкового, допоміжного і запасного гальмівних механізмів.
Перевагою гідравлічного приводу (рис. 17) є простота конструкції високий ККД (0,8–0,9), одночасність та плавність гальмування всіх коліс. Недоліком гідравлічного приводу є обмеження максимальних приводних сил.
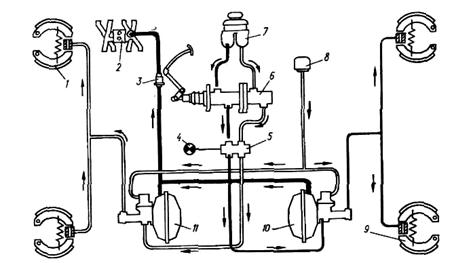
Рис. 17. Схема гідроприводу двоконтурної гальмівної системи автомобіля ГАЗ-53-12: 1, 9 – відповідно, передній і задній гальмівні механізми. 2 – впускний трубопровід двигуна, 3 – запірний клапан; 4 – лампочка сигналізатора: 5 – сигналізатор несправності системи; 6 – головний циліндр; 7 – наповнювальний бачок; 8 – повітряний фільтр; 10, 11 – відповідно, задній і передній гідровакуумні підсилювачі
Перевагою пневматичного гальмівного приводу (рис.18) є мале зусилля привода педалі керування, висока надійність роботи, можливість використання стисненого повітря (накачування пневматичних шин, привод склоочисника та ін.). Перед рушенням з місця тиск у системі має становити не менше як 0,45 МПа, а під час руху трактора 0,6–0,76 МПа.
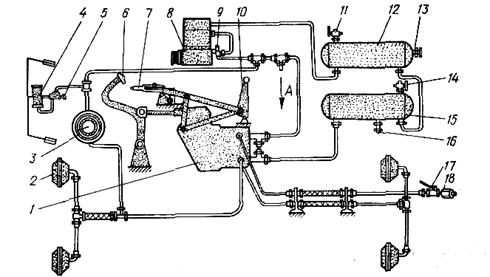
Рис. 18. Схема пневматичної гальмівної системи трактора Т-150К:1 – гальмовий кран; 2 – камера; 3 – манометр; 4 – склоочисник; 5 – кран; 6 – педаль гальма; 7 – важіль центрального гальма; 8 – компресор; 9 – регулятор тиску; 10 – важіль незалежного керування гальмами причепа; 11 та 14 –зливні краники; 12 і 15– балони; 13 – кран відбору повітря; 16– запобіжний клапан; 17 – роз'єднувальний кран; 18 – з'єднувальна головка; А – до магістралі причепа.