ЛЕКЦІЯ 3.
РОЗРАХУНКИ ТА ВИБІР ВМ ДЛЯ РОБОТИ З
РО
Вибір конкретного типу ВМ із серії, яку випускає та чи
інша фірма, виконується по потрібному моменту крутіння, або зусиллю та
швидкості переміщування вихідного валу. Потрібний момент чи зусилля
визначається можливістю ВМ переміщувати рухомий елемент РО у робочих умовах і з
необхідною швидкістю. У зв’язку з цим вибраний ВМ повинен мати запас по
моменту, який при розрахунках враховується коефіцієнтом запасу n. Що стосується швидкості переміщення
вихідного валу ВМ, яка визначається часом його повного переміщення Твм, то вона повинна бути достатньою, щоб затвор РО своєчасно, без
суттєвого відставання, приймав положення відповідно керуючому сигналу
автоматичного регулятора. Тобто час Твм
повинен вибиратися, виходячи із розрахунків САР, при яких враховуються статичні
та динамічні властивості ВМ та РО у робочих умовах.
Після того як вибрали РО необхідно розрахувати і
вибрати ВМ, який повинен цей РО переміщувати по командам автоматичного
регулятора. Розрахунки ВМ полягають у тому, щоб визначити які зусилля і моменти
повинен долати ВМ, щоб перемістити цей РО.
В залежності від типу РО, його конструктивних
особливостей та умов роботи на рухомий елемент РО діють наступні сили та моменти крутіння:
-
сила, або момент на затворі від дії перепаду тиску;
-
гідродинамічна сила ( сила напору ), або момент на
затворі;
-
сила тертя у опорах затвору та сальнику (ущільненню)
валу, або штоку;
-
вага затвору та інших частин рухомих елементів РО;
-
сила інерції маси затвору та інших елементів РО.
Для точного розрахунку цих сил та моментів необхідні
конкретні технічні дані та характеристики, які для більшості серійних РО у
супроводжувальній документації не вказуються. Тому при виборі і розрахунках ВМ
оцінюють тільки суттєві сили та моменти, а інші враховуються відповідними
коефіцієнтами запасу. Для сил і моментів, які змінюються по величині та
напрямку враховуються їх максимальні значення та найбільш несприятливі
напрямки. При плавному переміщенні РО можливо приймати коефіцієнт запасу n = 2. При швидкому і точному - n = 3-4.
3.1.1 Розрахунки та вибір ВМ
для РО типу затвору дискового
Розглянемо розрахунки потрібного ВМ для переміщення
затвору дискового (заслони поворотної).
На затвор дисковий у трубопроводі діють сили різного
характеру, які утворюють моменти, котрі ВМ повинен долати. При розрахунках
враховують такі моменти:
а) динамічний момент Мд, який
утворюється швидкісним напором:
![]() (6.1)
(6.1)
де а – коефіцієнт, який визначається
положенням затвору дискового відносно вісі трубопроводу. Максимальне значення
коефіцієнт а =0,0654 має при
положенні затвору під кутом 70°;
ΔРро – перепад
тиску на затворі, для надійності беруть максимальне значення;
ΔРро=Р1, тобто при
закритому РО [Па];
Дро – умовний
діаметр РО (затвору дискового) [м].
б) момент тертя у сальнику РО:
Мтс = ψ![]() (6.2)
(6.2)
де ψ = 1,14 – коефіцієнт
пропорційності;
![]() - діаметр штоку (у тому місці де він проходить
через сальник) [м];
- діаметр штоку (у тому місці де він проходить
через сальник) [м];
![]() - ширина набивки сальника [м];
- ширина набивки сальника [м];
![]() - робочий тиск перед РО [Па].
- робочий тиск перед РО [Па].
в) момент тертя у опорах вісі РО:
Мтв = μ
0,5 Дц( π/4) ![]()
μ =
0,15 –
коефіцієнт тертя у опорах;
Дц - діаметр
цапфи (осі) затвору дискового [м];
Дро - діаметр
затвору РО[м];
![]() - перепад тиску на затворі РО, за максимальне
значення беруть Р1 при закритому
затворі [Па]. Тоді
- перепад тиску на затворі РО, за максимальне
значення беруть Р1 при закритому
затворі [Па]. Тоді
Мтв = μ
Дц (π/8)![]() Р1; (6.3)
Р1; (6.3)
г) ВМ повинен долати сумарний момент Мс:
Мс = (Мд +
1.2(Мтс + Мтв)); (6.4)
д) з урахуванням коефіцієнту запасу n:
Мсз = n Мс. (6.5)
При з’єднанні РО з ВМ використовується, як правило,
4-х ланковий шарнір, який дає зменшення моменту крутіння на ВМ. Це зменшення
враховують коефіцієнтом послаблення ![]() , який
визначається характеристикою з’єднання (вгнута, чи лінійна).
, який
визначається характеристикою з’єднання (вгнута, чи лінійна).
Окрім того при розрахунках моменту крутіння для ВМ
треба враховувати відношення пускового моменту до номінального, для цього
вводиться коефіцієнт К:
К = Мп /
Мн.; (6.6)
Для ВМ типу МЕО К
= 1,7. Тоді з урахуванням всіх коефіцієнтів
потрібний момент крутіння ВМ дорівнює:
![]() (Мд + 1.2(Мтс +
Мтв)); (6.7)
(Мд + 1.2(Мтс +
Мтв)); (6.7)
ж) Із каталогу на ВМ вибирають ВМ з моментом на валу
найближчим більшим до Мсз.
3.1.2 Розрахунки та вибір
поворотного ВМ для прямохідного РО
3.1.2.1 Розрахунки зусиль
перестановки затвору односидільного РО
Для перестановки штоку прямохідного РО із одного положення в інше необхідно прикласти зусилля Nзп,
яке складається із окремих зусиль:
Nзп = ±Nз ±
Nш ![]() Nтр + Nущ, (6.9)
Nтр + Nущ, (6.9)
де Nз - сила тиску середовища на затвор РО [Па];
Nш - сила
тиску середовища на шток РО [Па];
Nтр – сила
тертя штоку у сальнику [Па];
Nущ - сила, яка
необхідна для ущільнюючого контакту у сідлі РО [Па].
Знаки ± перед Nз та Nш приймають конкретне значення в
залежності від напрямку цих сил. Якщо напрямок сили протилежний напрямку руху
ВМ, то береться знак (+), у протилежному випадку буде знак (-).
Знайдемо як визначаються ці сили:
а) сила тиску середовища на затвор РО
Nз =
Fс∆P = Fс (P1 – P2) [Н], (6.10)
де Fс - площа проходу у сідлі [м²];
Р1, Р2 - тиск
середовища перед та після РО [Па].
Площа Fс при
розвантаженому затворі дорівнює різниці площ поршню та сідла.
б) сила тиску середовища на шток РО:
Nш = 0,785
(Дш)² Р2 [Н], (6.11)
де Дш
– діаметр штоку [м];
Р2 - тиск
середовища після РО [Па].
в) сила тертя штоку у сальнику:
Nтр = 10780
Дш + 19,35 ![]() Дш Р1[Н]; (6.12)
Дш Р1[Н]; (6.12)
г) сила, яка необхідна для ущільнюючого контакту у сідлі РО.
При умовному тиску середовища Ру![]() 10МПа:
10МПа:
Nущ = 7,282 ![]() π Дс [Н]. (6.13)
π Дс [Н]. (6.13)
При умовному тиску середовища Ру![]() 10МПа:
10МПа:
Nущ = 7,282 ![]() π Дс
π Дс ![]() [Н], (6.14)
[Н], (6.14)
де Дс – діаметр сальнику [м];
Ру – умовний
тиск середовища [МПа].
3.1.2.2 Розрахунки зусиль
перестановки затвору двохсидільного РО
Зусилля для перестановки штоку двохсидільного клапану, який працює без
щільної посадки затвору у сідло, буде визначатись виразом:
Nзп = Nз ±
Nш ![]() Nтр [Н].
Nтр [Н].
Знак ± перед Nш
приймається у залежності від напрямку дії цієї сили. Якщо її напрямок дії
співпадає з напрямком дії Nз, то
береться знак (+), якщо ні, то (-).
Значення сил Nз,
Nш визначаються також формулами
(6.10), (6.11).
Сила тертя штока у сальнику Nтр визначається формулою (6.12), але якщо сальник має
фторопластове кільце, то
Nтр = 588 Дш
+ 9,6 ![]() Дш Р1[Н]. (6.15)
Дш Р1[Н]. (6.15)
3.1.2.3 Розрахунки
моменту крутіння на важелі прямохідного РО
З’єднання поворотного ВМ з прямохідним РО виконується
також у вигляді 4-х ланкового шарніру, але верхній важіль з’єднання повинен
з’єднуватись зі штоком РО у точці С (рис. 6.1).
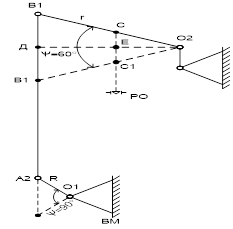
Рисунок 3.1 - З’єднання поворотного
ВМ з прямохідним РО
Ведучий важіль R
від ВМ через тягу передає зусилля Nу
точці В1 на ведений важіль r, який, у
свою чергу передає в точці С зусилля Nзп
на шток РО. Плече СО2 цього зусилля
відносно точки О2 позначимо b. Тоді момент крутіння на важелі РО дорівнює:
![]() (6.16)
(6.16)
де ![]() – коефіцієнт запасу;
– коефіцієнт запасу;
b – плече
зусилля на шток РО [м];
Nпс – зусилля
на шток РО [Н].
При з’єднанні РО з ВМ 4-х ланковий шарнір дає
зменшення моменту крутіння на ВМ. Це зменшення враховують коефіцієнтом
послаблення ![]() , який
визначається характеристикою з’єднання (вгнута, чи лінійна).
, який
визначається характеристикою з’єднання (вгнута, чи лінійна).
Окрім того при розрахунку моменту крутіння для ВМ
треба враховувати коефіцієнт К -
відношення пускового моменту ВМ до його номінального:
К = Мп / Мн. (6.17)
Тоді з урахуванням цих коефіцієнтів вираз для
необхідного моменту крутіння Мз ВМ,
з’єднанного з РО, буде дорівнювати:
![]() b Nзп. [Нм]. (6.18)
b Nзп. [Нм]. (6.18)
По одержаному значенню Мз із каталогу на ВМ треба вибрати ВМ з моментом на валу найближчим
більшим до Мсз.
3.1.3 Розрахунки потрібного
часу Твм повного переміщення вихідного валу ВМ
Час повного переміщення Твм вихідного валу ВМ розраховують у відповідності до типу закону
регулювання САР, у якій цей ВМ використовується
та часу повного запізнення ![]() об’єкту.
об’єкту.
Для П та ПІ – законів регулювання:
Твм = (1 -
4) ![]() . (6.19)
. (6.19)
Для ПІД – закону регулювання:
Твм = (0.75
– 2) ![]() . (6.19а)
. (6.19а)
При розрахунках часу Твм повного переміщення ВМ
необхідна перевірка роботи його разом з РО на можливий гідравлічний удар у
трубопроводі з рідиною при швидкому закритті РО. Для запобігання гідравлічного
удару знайдений час повного переміщення ВМ Твм
повинен задовольняти нерівності:
Твм ![]() (6.20)
(6.20)
де Дро – умовний (номінальний)
діаметр РО [мм].
ВМ в системі автоматичного регулювання повинен забезпечувати
переміщення РО з мінімально можливим спотворенням закону регулювання, який
формується автоматичним регулятором. Це досягається відповідною конструкцією
з’єднання ВМ з РО. Конструкція і геометрія з’єднання визначається у кожному
конкретному випадку типом і конструкцією РО та ВМ, їх взаємним розташуванням та
потрібним характером переміщення РО. По конструкції з’єднання ВМ з РО можуть
бути – безпосереднім, жорстким та тросовим.
Безпосереднє з’єднання вихідного валу ВМ з валом, або
штоком РО реалізується за допомогою фланця, або муфти. Воно використовується, в
основному, для електромагнітних та багато обертових електричних ВМ. В таких
з’єднаннях переміщення вихідного елементу ВМ таке ж, як і у РО. Безпосереднє
з’єднання використовується для керування запірною арматурою.
Жорстке з’єднання виконується за допомогою важелів,
або рейкових передач. Воно може лінійний, або не лінійний характер переміщення.
При лінійному – переміщення вихідного валу ВМ та рухомого елементу РО
відрізняються тільки масштабом. Не лінійний характер переміщення призводить при
не рівних переміщень РО при відносно рвійних переміщеннях вихідного валу ВМ,
окрім того дає можливість розширити межі взаємного розташування ВМ та РО.
Тросове з’єднання використовують в основному для РО,
які мають змогу під дією ваги свого рухомого елементу, або спеціального вантажу
(гирі), вертатися у початкове положення. Жорстке з’єднання має характеристику
наступного виду:
φ =
Кзє(φ)![]() α, (6.21)
α, (6.21)
де φ – хід РО;
Кзє –
коефіцієнт передачі з’єднання (зв’язку);
α – хід
вихідного валу ВМ.
При зміні навантаження об’єкту, щоб не змінювати
параметри налагодження регулятора бажано мати сталим (хоча би приблизно)
коефіцієнт передачі Кс розімкненої САР:
Кс = Кр![]() Кзє
Кзє![]() Кро
Кро![]() Коб, (6.22)
Коб, (6.22)
де Кр - коефіцієнт передачі регулятора;
Кзє -
коефіцієнт передачі з’єднання;
Кро -
коефіцієнт передачі регулюючого органу;
Коб -
коефіцієнт передачі об’єкту.
У цьому виразі Коб
є величина змінна, яка залежить від навантаження на об’єкт, тобто є функцією
величини φ ходу РО.
Коб =
f(φ). (6.23)
Коефіцієнт передачі РО Кро чисельно дорівнює дотичній у робочій точці до кривої його
робочої витратної характеристики Q =
ψ(φ). У загальному випадку перепад тиску на РО змінюється при
зміні положення його затвору, а тому його витратна характеристика нелінійна. Це
означає, що коефіцієнт передачі Кро є змінним і залежить від переміщення
затвору РО.
Кро = Кро
(φ).
Тепер вираз ( ) має вигляд:
Кс = Кр Кзє
(φ) Кро(φ) Коб(φ) = const, (6.24)
звідси
![]()
Тобто, щоб знайти характеристику з’єднання треба знати
статичні характеристики у робочих умовах РО та об’єкту. Оскільки ці
характеристики з достатньою точністю не завжди вдається знайти, на практиці,
вважаючи, що Коб ![]() ,
обмежуються приблизно сталим значенням співвідношення:
,
обмежуються приблизно сталим значенням співвідношення:
![]() (6.25)
(6.25)
У робочих умовах витратна характеристика Q = ψ(φ), на відміну від
пропускної завжди є випуклою (рис. 6.2). Тому для сталості співвідношення
( ) треба, щоб характеристика з’єднання Кзє = (φ) була вгнутою, дзеркально
відображеною відносно витратної характеристики РО (рис. 3.3). В цьому
випадку спільна статична
характеристика з’єднання та РО
буде лінійною (рис3.4).
Для деяких РО статична характеристика є наближеною до
лінійної.
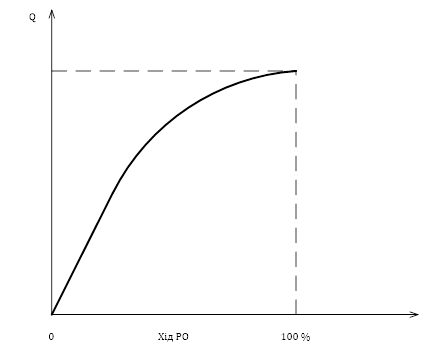
Рисунок 3.2 - Випукла робоча
витратна характеристика РО
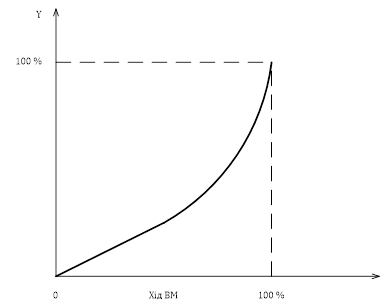
Рисунок 3.3 - Вгнута характеристика
з’єднання РО з ВМ
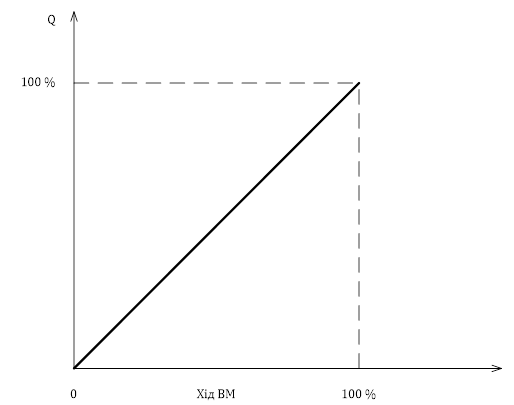
Рисунок 3.4 - Лінійна сумісна робоча
витратна характеристика
РО та ВМ (виконавчого пристрою)
Не лінійне жорстке з’єднання можливо використовувати
для зміни робочої витратної характеристики РО у певному діапазоні його
переміщення. Це досягається тим, що за рахунок відповідного підбору
з’єднувальних елементів, можливо одержати таке з’єднання, при якому на початку
РО переміщується на менший кут, а у кінці на більший кут ніж переміщується
вихідний вал ВМ.
Основними вимогами до жорсткого з’єднання є
забезпечення достатньої жорсткості та мінімальність люфтів у кінематичних парах. Наявність певних
люфтів у з’єднаннях може призвести до значної не лінійності САР і погіршенню
якості регулювання.
На практиці використовують декілька типів жорсткого
з’єднання:
-
поворотний ВМ з поворотним РО;
-
поворотний ВМ з прямохідним РО (прямого та зворотного
типів);
-
прямохідний ВМ з прямохідним РО;
-
прямохідний ВМ з поворотним РО.
Розглянемо ці типи з’єднаннь та їх розрахунки.
3.2.2 Розрахунки з’єднання
поворотного ВМ з поворотним РО
До цього типу з’єднання відноситься з’єднання затвору
дискового з поворотним ВМ. Для РО типу затвор дисковий (заслона поворотна)
пропускна характеристика наближена до рівнопроцентної, а витратна робоча
характеристика при ∆Рро ![]() є вгнутою, тому для них рекомендується
проектувати з’єднання з вгнутою характеристикою Для РО інших типів, якщо не
відома їх робоча витратна характеристика рекомендується проектувати лінійне
з’єднання РО з ВМ, яке можливо скорегувати при налагодженні САР в умовах
виробництва.
є вгнутою, тому для них рекомендується
проектувати з’єднання з вгнутою характеристикою Для РО інших типів, якщо не
відома їх робоча витратна характеристика рекомендується проектувати лінійне
з’єднання РО з ВМ, яке можливо скорегувати при налагодженні САР в умовах
виробництва.
З’єднання затвору дискового з обертальним ВМ
виконується у вигляді чотирьох ланкового шарніру (рис. 6.5) з наступними
ланками:
-
ведучий важіль О1А
довжиною R;
-
ведений важіль О2В
довжиною r;
-
тяга АВ довжиною l.
Для одержання вгнутої характеристики з’єднання треба,
щоб:
-
в положенні
«зачинено» тяга l та ведучий важіль R були розташовані на одній прямій і
являлись продовженням одне одного, а ведений важіль r, був перпендикулярним тязі l.
-
в положенні «відчинено» ведений важіль r повинен
повернутися на 90°, і стати
перпендикулярно площинці затвору РО при
умові
О2С ![]() ; (6.26)
; (6.26)
і О2С в положенні «відчинено» є перпендикуляр до тяги l.
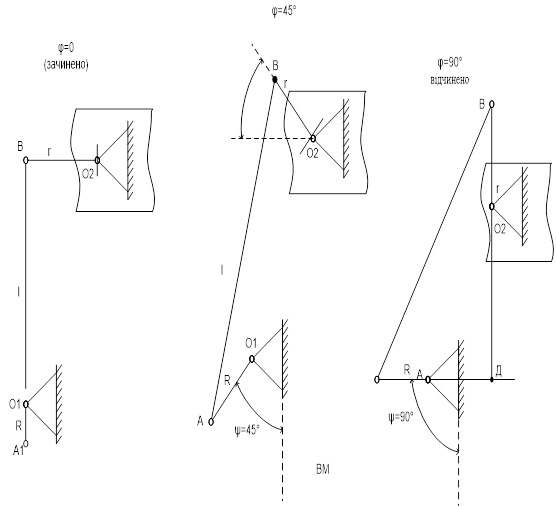
Рисунок 3.5 - З’єднання поворотного
ВМ з затвором дисковим
(вгнута характеристика з’єднання)
Розглядаючи з’єднання в положенні φ
= 90°, з урахуванням положення φ
= 0°, запишемо на підставі теореми Піфагора рівняння:
(R + r)![]() (6.27)
(6.27)
Після перетворення одержимо:
R² +
r² - l (R – r) = 0, (6.28)
звідси:
![]() (6.29)
(6.29)
Із тотожності трикутників ABD та CBO2 (положення φ = 90°) знаходимо:
![]() (6.30)
(6.30)
Позначимо СО2 =
b, тоді із виразу ( ) одержимо:
![]() . (6.31)
. (6.31)
Введемо коефіцієнт
![]() послаблення моменту крутіння, як відношення:
послаблення моменту крутіння, як відношення:
![]() ; (6.32)
; (6.32)
тоді
![]() , (6.33)
, (6.33)
як правило, величина ![]() = 4, тоді:
= 4, тоді:
l = 4 (R +
r). (6.34)
Підставляючи (6.13) в (6.8) одержимо:
![]()
звідси
![]() ,
,
або
![]() r. (6.35)
r. (6.35)
Задаючись значенням r із (6.14) знайдемо R, а
із (6.13) - величину тяги l.
Для з’єднання з лінійною характеристикою розрахунки
спрощуються тим, що у цьому випадку:
R = r та l
= О1О2 (рис. 6.5),
Ψ =
φ = 0 ψ = φ = 45° ψ = φ = 90°.
Якщо розглядати положення при φ =45°, то при цьому шарнірне з’єднання утворює прямокутник і
важелі R та r перпендикулярні тязі l. Найменша величина плеча b сили, яку передає тяга l, є в положеннях «відчинено» та
«зачинено». В положенні «відчинено»
b = r cos45°
= r ![]() =R
=R![]() . (6.36)
. (6.36)
Хоча при цьому ![]()
![]() , але для
надійності беруть
, але для
надійності беруть ![]()
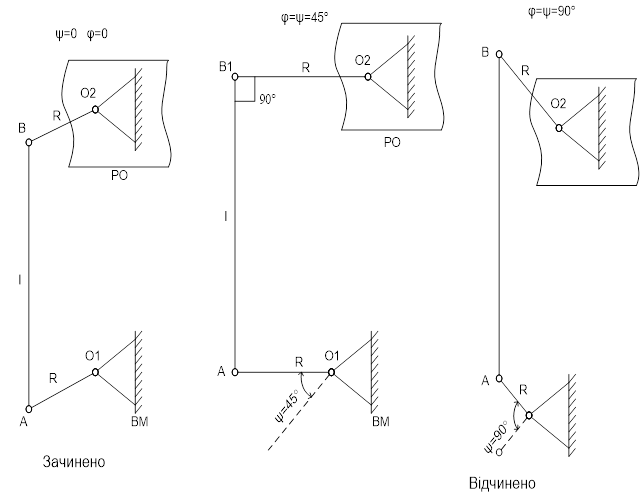
Рисунок 6.6 - З’єднання поворотного
ВМ з затвором дисковим
(лінійна характеристика з’єднання)
3.2.3 Розрахунки з’єднання поворотного ВМ з прямохідним РО
3.2.3.1 Розрахунки з’єднання прямого типу
поворотного ВМ з прямохідним РО
З’єднання поворотного ВМ з прямохідним РО називають
прямим типом, коли поворот ВМ по напрямку стрілки годинника призводить до
відкриття РО (рис. 6.6).
При з’єднанні поворотного ВМ з прямохідним РО
необхідно враховувати, що кут повного ходу веденого важеля з’єднання повинен
бути менше 90°. На відміну від поворотних затворів дискових, які мають
приблизно рівнопроцентні пропускні характеристики, прямо хідні клапанні РО можуть
мати пропускні характеристики різного типу. Це досягається використанням
клапанів з певним типом профілю. Тому РО замовляють з потрібною для об’єкту
регулювання пропускною характеристикою і використовують з’єднання з лінійною
характеристикою. Нелінійні з’єднання, як правило, в цих РО не використовуються
у зв’язку з труднощами розрахунків. Такі розрахунки є сенс виконувати, коли
відомі статична характеристика агрегату і робоча витратна характеристика даного
РО і коли для них потрібне таке не лінійне з’єднання.
При проектуванні і розрахунках лінійних шарнірних
з’єднаннь прямого типу необхідно розташовувати ВМ, РО і з’єднання таким чином,
щоб у середньому положенні важелів АО1
та ВО2 вони були паралельні один
одному, а тяга АВ у крайніх
положеннях була б перпендикулярною цим середнім положенням важелів АО1 та ВО2 (рис. 3.6). Важіль ВО2
є важелем ВМ і є заданою величиною, а довжина тяги АВ = l вибирається в залежності від відстані, на якій
розташовуються ВМ та РО. Потрібний кут![]() повного повороту веденого важеля ВО2 = r забезпечують за рахунок вибору
довжини цього важелю.
повного повороту веденого важеля ВО2 = r забезпечують за рахунок вибору
довжини цього важелю.
Знайдемо потрібну довжину r, яка б забезпечувала
поворот РО на кут ![]() при повороті
важеля R ВМ на кут ψ = 90°. Із (рис. 6.6) маємо:
при повороті
важеля R ВМ на кут ψ = 90°. Із (рис. 6.6) маємо:
А1А2 = В1В2
= b.
При цьому поворот на кут ψ = 90° та ![]() повинен давати однакові переміщення:
повинен давати однакові переміщення:
А1А2 = 2R
sin![]() ,
,
та В1В2 = 2r sin![]() .
.
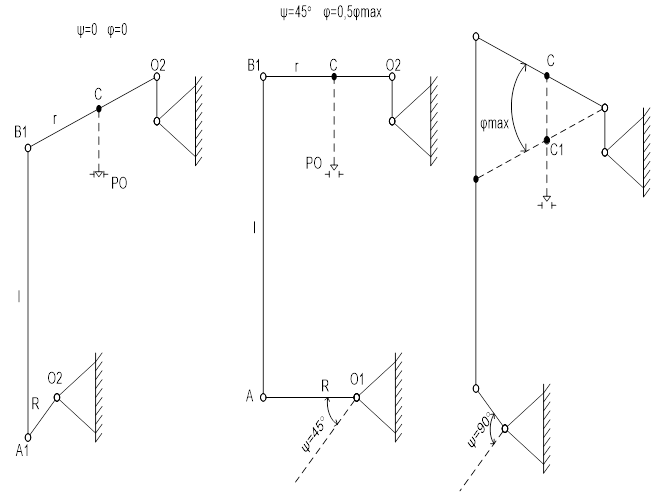
Рисунок 3.7 - Прямий тип з’єднання
поворотного ВМ з прямохідним РО
Прирівнявши ці переміщення, маємо:
![]() . (6.37)
. (6.37)
Вибираючи кут ![]() і знаючи
довжину важеля R ВМ, по формулі
(6.34) знаходимо довжину важеля r.
і знаючи
довжину важеля R ВМ, по формулі
(6.34) знаходимо довжину важеля r.
3.2.3.2 Розрахунки з’єднання
зворотного типу поворотного ВМ з прямохідним РО
Для з’єднання зворотного типу, коли поворот ВМ в
сторону протилежну ходу стрілки годинника відчиняє РО (рис. 6.8), розрахунки
аналогічні з’єднанню прямого типу.
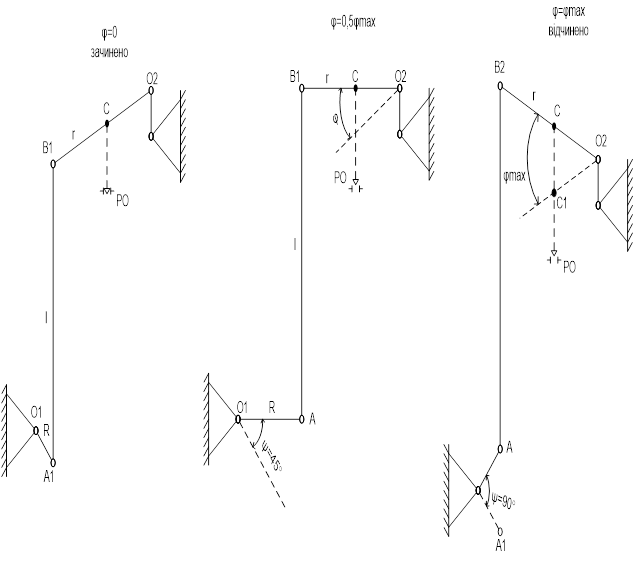
Рисунок 3.8 - Зворотний тип з’єднання поворотного ВМ з
прямохідним РО
3.2.4 Розрахунки з’єднання
прямохідного ВМ з прямохідними РО
Схеми з’єднання (рис. 3.6) та (рис. 3.7) можуть
використовуватись і для з’єднання прямохідних ВМ з прямохідними РО. У цьому
випадку (рис. 6.8) повний хід S штоку
ВМ повинен дорівнювати відрізкам:
S = А1А2 =
В1В2 = 2r sin![]() (6.38)
(6.38)
Знаючи повний хід S
ВМ та задаючись кутом ![]() , знайдемо довжину важеля r:
, знайдемо довжину важеля r:
![]() (6.39)
(6.39)
Знаючи величину s
= С1С2 повного ходу РО і розглядаючи тотожні трикутники О2В1В2 та О2С1С2, можна записати рівняння:
![]() , (6.40)
, (6.40)
де h – висота трикутника О2С1С2;
H - висота
трикутника О2В1В2;
С1С2 = s – повний
хід РО;
В1В2 = S - повне
переміщення крайньої точки важеля r.
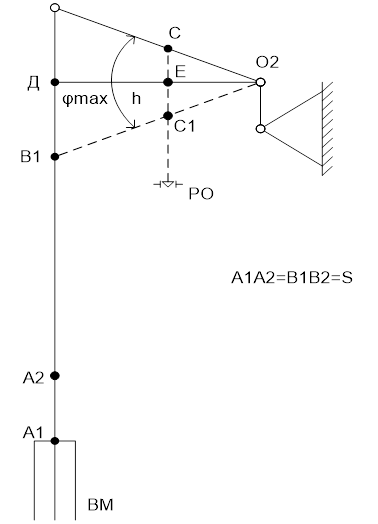
Рисунок 3.9 - З’єднання прямохідного
ВМ з прямохідним РО
Враховуючи, що: В1В2
= S; H = r cos![]() , із
рівняння (6.40) знайдемо висоту h, по
якій можна знайти точку приєднання штоку РО:
, із
рівняння (6.40) знайдемо висоту h, по
якій можна знайти точку приєднання штоку РО:
![]() (6.41)
(6.41)
3.2.5 Розрахунки
з’єднання прямохідного ВМ з поворотним РО
Для з’єднання прямохідного ВМ з поворотним РО
використовується так ж кінематична схема (рис. 6.9), як і для прохідного ВМ з
прямохідним РО. При цьому також повний хід S
штоку ВМ повинен дорівнювати відрізкам:
S = А1А2 =
В1В2 = 2r sin![]() . (6.42)
. (6.42)
Оскільки кут ![]() = 90°, то з
цього виразу знаходимо довжину важеля r:
= 90°, то з
цього виразу знаходимо довжину важеля r:
![]() . (6.43)
. (6.43)
3.3 Приклади
розрахунків та вибору ВМ
3.3.1 Розрахунки та вибір одно
обертового ВМ типу МЕО для переміщення затвору дискового
Вибрати ВМ типу МЕО (виробництво Росія) для затвору
дискового системи автоматичного регулювання тиску колошникового газу доменної
печі.
3.3.1.1 Дані
для розрахунку
1.
Тиск колошникового газу (надлишковий) Р1 -
170000 Па.
2.
Діаметр затвору поворотного Дро - 0,5 м.
3.
Діаметр штоку затвору Дш - 0,06 м.
4.
Довжина сальникової набивки lс - 0,1 м.
5.
Діаметр цапфи затвору Дц - 0,04 м.
6.
Час запізнення об’єкту ![]() - 4,0 с.
- 4,0 с.
Розрахунки і вибір ВМ:
а) динамічний момент Мд, який
утворюється швидкісним напором:
- в
положенні «ЗАЧИНЕНО» перепад тиску на затворі буде дорівнювати надлишковому
тиску газу, тому
беремо ∆Р = Р1.
Коефіцієнт а= 0,0654.
Мд = а ΔРро ![]()
б) момент тертя у сальнику:
- коефіцієнт
![]() = 1,14
= 1,14
Мтс = ![]() ;
;
в) момент тертя у опорах вісі:
- коефіцієнт
μ =0.15
Мтв = μ Дц( π/8)![]() Р1 = 0,15
Р1 = 0,15![]() ;
;
Мтв = 159,1нм;
г) сумарний момент:
Мс = n ![]() (Мд + 1.2 (Мтс
+ Мтв));
(Мд + 1.2 (Мтс
+ Мтв));
д) приймаємо n = 2, ![]() = 4, К = 1,7, тоді:
= 4, К = 1,7, тоді:
Мс = 2 ![]() (572 + 1.2(
15,5 + 159,1)) = 4,7x781 = 3670 нм;
(572 + 1.2(
15,5 + 159,1)) = 4,7x781 = 3670 нм;
ж) знаходимо по каталогу найближче більше значення
моменту на валу ВМ:
- для
ВМ з важільним з’єднанням по каталогу найближче більше число є 4000 нм, тобто: Мвм =
4000нм.
з) з урахуванням часу запізнення об’єкту час переміщення вихідного валу ВМ
беремо: Твм = 4![]() .
.
У каталозі найближче більше число часу переміщення є Твм = 25с. Оскільки РО є затвор
поворотний, то ВМ повинен переміщувати вихідний вал на 0,25 оберту (90°).
є) формуляр замовлення ВМ типу МЕО:
- з
урахуванням знайдений величин для даних робочих умов беремо ВМ такого типу:
МЕО -4000 / 25 – 0,25.
3.3.2 Розрахунки з’єднання одно
обертового ВМ з поворотним РО
Візьмемо дані попереднього прикладу розрахунку ВМ для
переміщення затвору дискового при регулюванні тиску колошникового газу доменної
печі. Для з’єднання ВМ з затвором дисковим використовуємо 4-х ланкове шарнірне
з’єднання з вгнутою характеристикою (рис. 3.10).
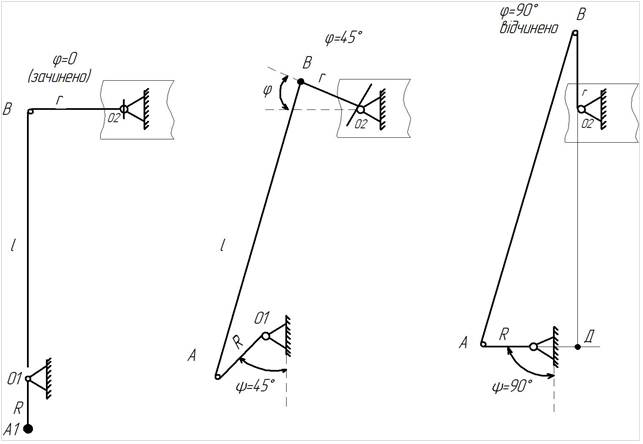
Рисунок 3.10 - 4-х ланкове шарнірне з’єднання ВМ типу
МЕО з затвором
дисковим для регулювання тиску
колошникового газу
1.
Тип виконавчого механізму - МЕО -4000 / 25 – 0,25.
2.
Довжина важеля ВМ (стандартна) R - 360 мм.
3.
Кут повороту φ веденого важеля r - 90°.
Треба знайти довжину тяги l, довжину веденого важеля r
(на валу РО) та відстань H між рівнем
вісі РО і вісі ВМ.
Розрахунки з’єднання:
а) згідно формули (6.14) довжина веденого важеля r
дорівнює:
![]() ;
;
б) довжина з’єднуючої тяги l згідно формули (6.13):
l = 4 (R +
r) = 4 (360 + 279) = 2556 мм;
в) відстань О2D
при установці ВМ відносно РО згідно розташуванню з’нання при φ =0° (Рисунок 6.9) повинна
дорівнювати:
О2D = H
= l – R = 2556 – 360 = 2196 мм.
3.3.3 Розрахунки
та вибір одно обертового ВМ типу МЕО і його з’єднання з односидільним прямохідним РО
Визначити номінальний момент крутіння, час повного
ходу ВМ та розрахувати з’єднання його з односидільним прямохідним РО. З’єднання
повинно бути прямого типу (поворот валу ВМ по напрямку стрілки годинника
відчиняє РО) і уявляти собою 4-х ланковий шарнір (рис. 6.7). Односидільний
клапан встановлено на трубопроводі води для регулювання її витрат.
1.
Тиск води у трубопроводі до клапану Р1 - 6,0792 МПа.
2.
Тиск у трубопроводі
після клапану Р2 - 5,9792 МПа.
3.
Умовний діаметр РО Ду
- 0,02 м.
4.
Діаметр сідла Дс
- 0,02 м.
5.
Діаметр клапану Дк
- 0,022 м.
6.
Діаметр штоку Дш
- 0,02 м.
7.
Хід штоку hш -
0,024 м.
8.
Час повного запізнення об’єкту τо - 35 с.
3.3.3.2 Розрахунки зусилля для
перестановки РО
Для вибору ВМ необхідно визначити потрібний
номінальний момент крутіння Мн на
його валу. Цей момент залежить від потрібного зусилля Nзп для перестановки даного РО, а також від параметрів з’єднання ВМ
і РО. Згідно формули (6.9) для знаходження зусилля Nзп необхідно знайти сили, із яких воно складається.
1.
Сила тиску Nз середовища на затвор РО, згідно формули
(6.10) дорівнює:
Nз =
Fс∆Pро = Fс (P1 – P2) [Н].
Площу зазору між сідлом та клапаном
визначимо, як:
Fc =
πДс hш = 3,14![]() 0,02
0,02![]() 0,022 = 0,00138
0,022 = 0,00138 ![]() .
.
2.
Сила тиску на затвор:
Nз = 0,00138![]() 100 000 = 138 Н.
100 000 = 138 Н.
3.
Сила тиску середовища на шток РО згідно формули (6.11)
сила тиску на шток Nш дорівнює: Nш =
0,785 (Дш)² Р2 = 0,785![]() (0,02) ²
(0,02) ²![]() 5,9792
5,9792![]() 101320 = 190[Н].
101320 = 190[Н].
4.
Сила тертя штоку у сальнику: Nтр =
10780 Дш + 19,35 ![]() Дш Р1:
Дш Р1:
Nтр=10780![]() 0,02+19,35
0,02+19,35![]() 0,02
0,02![]() 6,0792
6,0792![]() 101320=215,6+23,8=239[Н];
101320=215,6+23,8=239[Н];
5.
Сила, яка необхідна для ущільнюючого контакту у сідлі
РО, при умовному тиску середовища Ру![]() 10МПа: Nущ =
7,282
10МПа: Nущ =
7,282 ![]() π Дс =
7,282
π Дс =
7,282![]() 3,14 0.02 =
457[Н].
3,14 0.02 =
457[Н].
Потрібне зусилля для перестановки
РО:
Nзп =
Nз+Nз+Nтр+Nущ=138+190+239+457=1024[Н].
3.3.3.3 Розрахунки з’єднання ВМ
з РО і вибір ВМ
Момент крутіння, який повинен бути на важелі ВМ, визначається згідно
формули (6.18): ![]() b Nзп [Нм].
b Nзп [Нм].
Для знаходження Мз
приймаємо коефіцієнт запасу по моменту n
= 2, коефіцієнт послаблення моменту за рахунок механізму з'єднання nо = 4, а довжину важеля b треба розрахувати.
ВМ типу МЕО мають у комплекті важіль R зі стандартною довжиною наприклад,
R = 0,36 м. Приймемо,
що при повороті важеля R ВМ на кут ψ = 90°, важіль r РО повернеться на
кут φ = 60°. Тоді згідно формули
(6.34)

Приймаємо r =
0,510 м. На цьому важелі знайдемо точку С2,
в якій важіль r повинен з’єднуватись зі
штоком РО. Розглянемо два
трикутника (рис. 6.11) ∆О2ДВ2 ∆О2ЕС2.
В них сторона ДВ2
= r sin30°, тобто ДВ2 = 0,510 0,5 =
0,255м, сторона ЕС2 = h/2 = 0,022 /2
=0,011м. Оскільки ∆О2С1С2 є рівностороннім, то С1С2 = h = О2С2, тобто О2С2 = 0,022 м. Таким чином точка
з’єднання С2 повинна бути на відстані
0,022м від початку важеля r. Звідси
важіль:
b = О2Е = ![]() = 0,019м.
= 0,019м.
Момент Мз дорівнює:
![]() b Nзп =
b Nзп = ![]() 0,019
0,019![]() 1024 = 92 [Нм].
1024 = 92 [Нм].
По каталогу фірми виробника знаходимо ВМ з моментом
найближчим більшим до одержаної величини, тобто Мз =100Нм.
З урахуванням часу запізнення об’єкту τо час
переміщення вихідного валу ВМ Твм
згідно формулі (6.19а):
Твм = (![]() 2)
2) ![]()
Згідно каталогу беремо Твм = 63с.
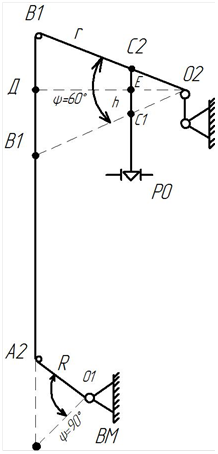
Рисунок 3.11 - З’єднання (прямого
типу) одно обертового ВМ
з одно сидільним прямохідним РО
Оскільки ми вибрали кут повороту ВМ ψ =90°, то він повинен переміщувати
свій вихідний вал на 0,25 оберту.
Тепер остаточно тип ВМ визначиться так: МЕО -100 /63 – 0,25.