ЛАБОРАТОРНА РОБОТА 7
Тема: Дослідження електричних виконавчих механізмів
7.1 Мета роботи: ознайомитися з різноманітними електричними виконавчими механізмами і працюючими в комплекті з ними допоміжними пристроями (пускачами, блоками керування, дистанційними покажчиками положення) і виконати перевірку їхньої роботи в режимі дистанційного ручного керування.
7.2 Теоретичні відомості:
Електричні виконавчі механізми (ЕВМ) служать для переміщення регулюючих органів по командах, що надходять від електричних регуляторів при автоматичному керуванні або від оператора (за допомогою кнопок або ключів керування) при ручному дистанційному керуванні. ЕВМ можуть створювати великі перестановочні зусилля; їх можна встановлювати на значній відстані від регулятора.
До складу ЕВМ звичайно входять такі основні елементи: реверсивний електродвигун із постійною швидкістю переміщення вихідного елемента, редуктор, що понижує число обертів вихідного вала двигуна, вихідний пристрій для механічного з'єднання з регулюючим органом, ручний привід на випадок виходу з ладу автоматики або для налагоджування, кінцеві вимикачі, що забезпечують зупинку механізму в крайніх положеннях регулюючого органа, шляхові вимикачі, використовувані для обмеження діапазону переміщення регулюючого органа, пристрій самогальмування при відключенні електродвигуна (для вихідного вала після припинення дії керуючих імпульсів), давачі положення вихідного елемента і сигналу зворотного зв'язку, пропорційного положенню затвора. Розрізняють ЕВМ однообертові (із кутом повороту вала менше 3600 ) і багатообертові. Вони можуть мати контактне і безконтактне керування. У першому випадку для включення, відключення і реверсування електродвигунів застосовують релейну або контактну апаратуру, у другому - тиристорні підсилювачі (пускачі).
ЕВМ постійної швидкості можуть знаходитися в трьох сталих станах: переміщення вихідного елемента з постійною швидкістю S , нерухомий стан, переміщення вихідного елемента в протилежному напрямку зі швидкістю S. Оскільки команда від релейно-імпульсного регулятора надходить на ЕВМ у вигляді послідовності імпульсів, то середня швидкість  переміщення вихідного елемента ЕВМ буде визначатися співвідношенням між тривалостями включеного і виключеного станів. Нехай на вхід ЕВМ постійної швидкості (рис.1) надходить імпульсна напруга ZU, амплітуда якої може приймати тільки два значення (0 або Z), а носієм інформації є шпаруватість імпульсів γ, що надходять із періодом
переміщення вихідного елемента ЕВМ буде визначатися співвідношенням між тривалостями включеного і виключеного станів. Нехай на вхід ЕВМ постійної швидкості (рис.1) надходить імпульсна напруга ZU, амплітуда якої може приймати тільки два значення (0 або Z), а носієм інформації є шпаруватість імпульсів γ, що надходять із періодом

де ΔtI - час включення напруги і переміщення вихідного елемента ЕВМ, ΔtП - час відключення напруги і паузи в переміщенні вихідного елемента ЕВМ. Середня швидкість переміщення вихідного елемента зв'язана зі шпаруватістю γ співвідношенням
7.3 Електричні виконавчі механізми
7.3.1 Електричні виконавчі механізми однообертові
Виконавчі механізми МЕО і МЕО-К. Найбільше поширення серед електричних виконавчих механізмів постійної швидкості, застосовуваних у складі релейно-імпульсних регуляторів, одержали однообертові виконавчі механізми типу МЕО і МЕО-К виробництва ВАТ "Завод Електроніки і Механіки" (м. Чебоксари).
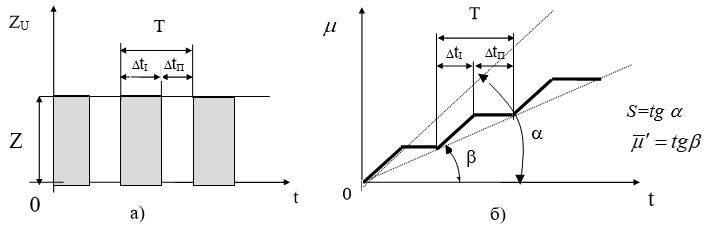
Рис. 1. Реакція ЕВМ постійної швидкості (б) на імпульсний сигнал (а)
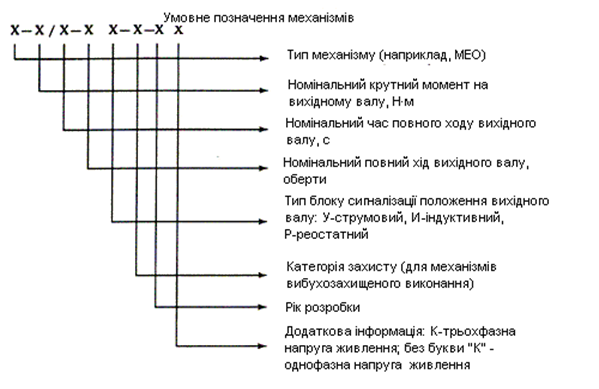
Номінальний повний хід вихідного вала в цих механізмах може бути 0,25 або 0,63 оберта. Відповідно до ДСТ 7192-74 у позначенні виконавчих механізмів МЕО і МЕО-К вказуються послідовно параметри:
Виконавчі механізми типу МЕО випускаються в різноманітних модифікаціях, для яких зазначені параметри охоплюють широкий діапазон значень:
МКР = 6,3; 16; 40; 100; 250; 320; 630; 800; 1000; 1600; 2500; 4000, 10000 Н·м;
ТН.Х. = 10, 25, 63, 160 с;
φ>Н.Х. = 0,25; 0,63 об.
Приклади позначень виконавчих механізмів типу МЕО і МЕО-К: МЕО-40/10-0,25-82; МЕО-250/25-0,63-84 К.
Механізми типу МЕО розраховані на безконтактне керування за допомогою реверсивних тиристорних пускачів типу ПБР-2М, У29.2, а механізми МЕО-К пускачами ПБР-3А, ФЦ-0610, та ін. Водночас, допускається і контактне керування за допомогою магнітних пускачів (ПМЕ або ПМРТ).
Однією з відмінних рис виконавчих механізмів типу МЕО є застосування в них однофазних конденсаторних двигунів типу ДАУ, або ДСР. Ці двигуни відрізняються малою інерційністю, високою надійністю і здатні довгостроково працювати на упор. Остання обставина дозволяє виключити зі схеми керування виконавчим механізмом захисні кінцеві вимикачі, роль яких виконують настроюванні механічні упори. Однофазне живлення двигуна напругою 220 В частотою 50 Гц також спрощує електричну схему керування виконавчим механізмом.
Зниження частоти обертання і збільшення крутного моменту, створюваних двигуном здійснюється за допомогою багатоступінчастих циліндричних зубчатих або комбінованих черв΄ячно-зубчатих передач (редукторів). Вали обертаються на шарикопідшипниках. Зубчасті передачі і шарикопідшипники змазуються густим мастилом, що забезпечує установку механізму в будь-якому положенні в просторі. Завдяки цьому відкривається можливість застосування порівняно малопотужних електродвигунів для приводу виконавчих механізмів із великими крутними моментами. Механізми типу МЕО-К комплектуються асинхронними трифазними електродвигунами типу 4А або АОЛ.
Гальмівний пристрій виконавчих механізмів типу МЕО і МЕО-К має електромагнітний привід у вигляді соленоїда, що включається паралельно з обмоткою керування двигуна. При знеструмленому електромагніті за допомогою робочої пружини забезпечується необхідне зусилля гальмування (рис. 2). При наявності силової напруги на обмотці керування електродвигуна з'являється струм і в обмотці соленоїда. Якір втягується і відводить гальмівну колодку від вала електродвигуна. При зникненні напруги на обмотці керування двигуна соленоїд знеструмлюється і вал електродвигуна гальмується за допомогою пружини і гальмівної колодки.
Зупинка механізмів і сигналізація положень здійснюється мікроперемикачами S1-S4, що комутують ланцюги напругою 220 В, частотою 50 Гц. Мікроперемикачі вмонтовані в блоки сигналізації положення, що крім мікровимикачів комплектуються одним індуктивним (типу БСПИ-10) або одним струмовим (типу БСПТ-10), або двома реостатними (типу БСПР-10) давачами зворотного зв'язку і дистанційного вказівника положення механізму (R1;R2).
Індукційні давачі живляться однофазним змінним струмом напругою 12В частотою 50 Гц. Робочий хід сердечника давача - 5 мм.
Кожний реостатний давач має повний опір 100 або 250 Ом. Струмовий давач може видавати уніфікований сигнал 0-5; 0-20; 4-20 мА.
Механізми виготовляються для роботи в повторно-короткочасному реверсивному режимі з числом включень до 320 в годину і ПВ до 25% при навантаженні на вихідному валові від номінальної протидіючої до 0,5 номінального значення супутньої. При цьому механізми допускають роботу протягом 1 год у повторно-короткочасному реверсивному режимі з числом включень до 630 у годину і ПВ до 25 % з наступним повторенням не раніш ніж через 3 год. Інтервал часу між вимиканням і вмиканням на зворотний напрямок - не менш 50 мс. Максимальна тривалість неперервної роботи механізму в реверсивному режимі не повинна перевищувати 10 хв.
Виконавчі механізми типу ИМТМ-40/2,5-83. Призначені для швидкого переміщення запірного органу. У якості приводу використовуються асинхронний електродвигун із короткозамкнутим ротором. Керування здійснюється реверсивним магнітним пускачем типу ПМЕ, у ланцюг керування якого включені кінцеві вимикачі ЕВМ. Загальний вид, габаритні і приєднувальні розміри виконавчого механізму представлені на рис. 3. Редуктор 3 є основним вузлом, до якого приєднуються всі інші вузли, що входять у механізм. Він складається з литого корпусу з розміщеними в ньому черв'яком, черв'ячним колесом і фрикційним гальмом 5. Фрикційне гальмо служить для обмеження вибігу вихідного вала механізму. Ручне керування механізмом здійснюється шляхом зчленування знімної ручки з кінцем вала черв'яка.
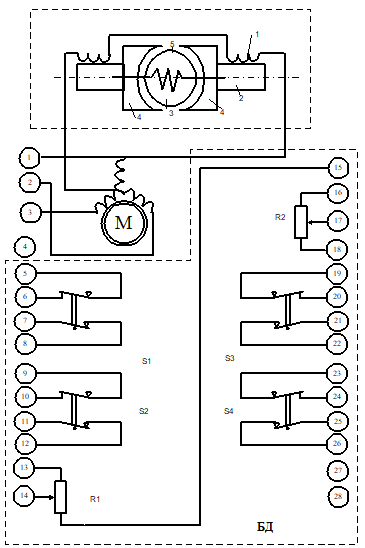
Рис. 2. Принципова електрична схема вмикання МЕО:
М - електродвигун; ЕМТ - електромагнітне гальмо;
1 - обмотка соленоїда; 2 - якір; 3 - пружина; 4 -гальмівна колодка; 5 - вал електродвигуна;
S1-S4 -мікроперемикачі; R1,R2 - реостатні давачі; БД - блок давачів.
Вузол мікровимикачів 4 складається з двох кулачків і двох мікроперемикачів і призначений для обмеження діапазону робочого ходу вихідного вала механізму.
Кінцеві вимикачі спрацьовують при натисканні відповідних кулачків, що повертаються разом з вихідним валом механізму, на буферні пластини, з'єднані з приводними елементами мікроперемикачів. Кут повороту вала виконавчого механізму залежить від положення кулачків на вихідному валові. У механізмі застосований електродвигун 4АА56В4УЗ вихідною потужністю 180 Вт.
Механізм виготовляється для роботи в повторно-короткочасному реверсивному режимі з числом включень до 60 за годину з ПВ до 15% при навантаженні на вихідному валу від номінального протидіючого до номінального супутнього. Механізм допускає безперервну роботу тривалістю до 10 хв із чергуванням номінального протидіючого і супутнього навантажень на вихідному валу. Механізм допускає установку при будь-якому просторовому розташуванні вихідного валу.
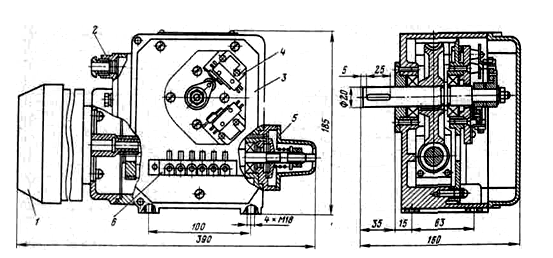
Рис. 3. Загальний вид, габаритні і приєднувальні розміри виконавчого механізму ИМТМ-40/2,5-83:
1 - електродвигун; 2 - штуцерне введення; 3 - редуктор; 4 - вузол мікровимикачів; .5 - фрикційне гальмо; 6 - коробки затисків
7.3.2 Електричні виконавчі механізми багатообертові
Механізми електричні багатооборотні типу МЕМ випускаються з такими технічними характеристиками:
МКР= 40, 100 Н·м;
ТН.Х.= 25, 63, 160, 250, 400 с;
φН.Х.= 10, 25, 63, 250 об.
Приклад позначення механізму МЕМ: МЕМ-40Б/25-10.
У механізмах МЕМ використані синхронні електродвигуни типу АОЛ або 4А з електромагнітним гальмом типу ББТ-2. Для керування виконавчими механізмами МЕМ використовуються пускові пристрої контактного типу.
Механізми МЕМ містять два реостатні БДР-П або індуктивні БДІ-6 давачі: один - для вказівки положення вихідного вала ЕВМ, другий – для зворотного зв'язку по положенню регулюючого органа.
7.3.3 Виконавчі механізми типу ПР.
Електричні виконавчі механізми типу ПР застосовуються для пропорційного регулювання. Принципова схема механізму ПР зображена на рис. 4.
У приводі є два електродвигуни, їх однакові статорні обмотки ОС1, ОС2 виготовлені таким чином, що магнітні поля обертаються в протилежних напрямках (при наявності струму в обмотках). Короткозамкнені ротори Р1, Р2 закріплені на спільному валу. Напрямок обертання вихідного вала залежить від того, на яку статорну обмотку ОС1 або ОС2 - подається напруга живлення. Зміна напрямку обертання досягається підключенням до мережі іншої обмотки статора.
Обмотки статора підключаються до мережі через контакти К1, К2, що замикаються регулятором при автоматичному регулюванні, або оператором - при ручному дистанційному керуванні ЕВМ.
Наявність двох електродвигунів дозволяє поставити затвор регулюючого органа, з’єднаного з вихідним валом виконавчого механізму, у будь-яке проміжне положення в межах його ходу.
Пуск електродвигунів можливий у будь-якому напрямку. При замиканні одного з контактів (К1 або К2) напруга подається на відповідну обмотку статора, що викликає появу обертального поля в одному або в іншому напрямку. Ротор, а разом із ним і вихідний вал, починають обертатися, переміщуючи відповідно регулюючий орган.
Зупинка двигуна можлива при розмиканні керуючих контактів ( К1 або К2 ) або при розриві відповідного кінцевого вимикача (КВ1 або КВ2). Крайні значення кута повороту вихідного вала, при яких спрацьовують кінцеві вимикачі, у приводі ПР можна встановлювати в межах до 180О .
У корпусі ЕВМ є редуктор і реостатний датчик положення регулюючого органа, повзунок якого механічно пов'язаний із вихідним валом. Конструкція редуктора дозволяє змінювати швидкість переміщення регулюючого органа. Мірою цієї швидкості є час сервомотора, тобто час, необхідний для переміщення регулюючого органа з одного крайнього положення в інше.
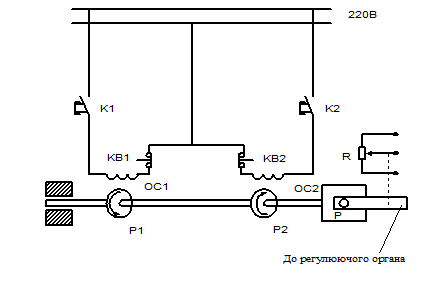
Рис. 4. Принципова електрична схема виконавчого механізму типу ПР:
ОС1, ОС2 - обмотки статорів; Р1, Р2 - ротори; КВ1, КВ2 - кінцеві вимикачі; Р - редуктор;
R - реостатний давач положення валу виконавчого механізму; К1, К2 - керуючі контакти .
7.3.4 Електромагнітні виконавчі механізми
Електромагнітний привід характеризується релейною дією, при вмиканні або вимиканні струму в обмотці електромагніта його сердечник, а разом із ним і регулюючий орган, миттєво переходять з одного положення в інше. Зупинка регулюючого органа в проміжному положенні між двома крайніми положеннями неможлива.
Електромагнітні клапани (їх називають також соленоїдними) характеризуються розміром діаметра вхідного і вихідного патрубків. Чим більший діаметр клапана, тим більшою повинна бути втягуюча сила електромагніта, і тим більшим буде струм, а також виділення теплоти, в обмотці електромагніта. Тому частіше електромагнітні клапани мають відносно невеликий діаметр (6-12 мм); у цьому випадку не потрібно великих перестановочних зусиль. При великих розмірах клапана застосовують спеціальні схеми, у яких напруга живлення електромагніта включається короткочасно. Прикладом може слугувати схема, зображена на рис. 5.
При замиканні кнопки К1, (або відповідного контакту регулюючого приладу) в обмотці соленоїда С1 тече струм, стержень 1 втягується в котушку, регулюючий орган відкриває технологічну лінію. При цьому горизонтальний стержень 3 під дією пружини 4 потрапляє в паз 2 стержня 1 і фіксує його у верхньому положенні. Одночасно розмикається кінцевий вимикач КВ і струм соленоїда С1 зникає. Для переведення регулюючого органа в інше положення необхідно, натискаючи кнопку К2, включати струм на обмотці С2. Соленоїд С2 втягує стержень 3, а стержень 1 під дією пружини 5 закриває регулюючий орган. Таким чином, струм у котушках соленоїдних клапанів протікає тільки під час перестановки регулюючого органа з одного положення в інше.
Електромагнітні клапани застосовуються в системах двопозиційного регулювання, захисту і блокування, а також для різноманітних переключень в імпульсних лініях систем автоматичного і дистанційного керування.
Для живлення соленоїдів використовують, як правило, постійний струм, оскільки в такому випадку при однакових розмірах котушки втягуюче зусилля більше.
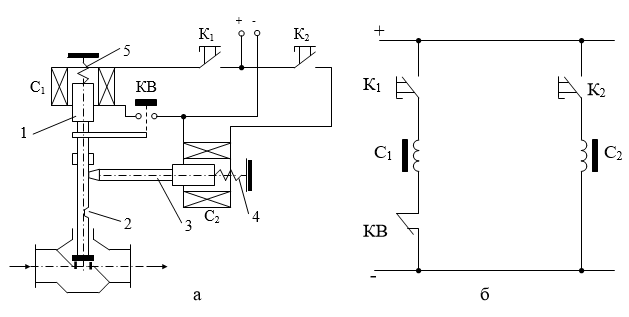
Рис. 5. Принципова (а) і електрична (б) схеми електромагнітного
виконавчого механізму (соленоїдного клапана).
7.4 Додаткові пристрої для керування електричними виконавчими механізмами
7.4.1 Контактні пускові пристрої
Контактні пускові пристрої через свою простоту і низьку вартість одержали широке поширення. Одним із них є пускач магнітний реверсивний із електроконденсаторним гальмівним пристроєм типу ПМРТ-69 (рис. 6), що виконаний на базі магнітного реверсивного контактора МКР-0-58 і відрізняється від нього лише тим, що містить вмонтовані електролітичні конденсатори для гальмування керованого виконавчого механізму.
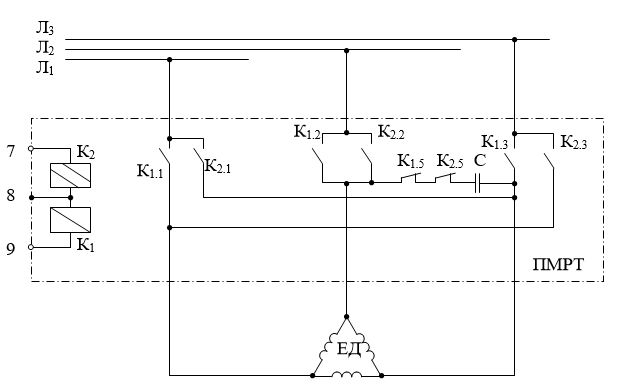
Рис. 6. Схема включення магнітного пускача типу ПМРТ-69
Реверс електродвигуна виконавчого механізму забезпечується зміною послідовності двох комутованих фаз. Як перевагу контактора необхідно відзначити ефективне механічне блокування від одночасного спрацьовування обох груп силових контактів.
Більш докладного розгляду потребує принцип електроконденсаторного гальмування. Гальмівний пристрій являє собою електролітичний конденсатор С , що підключається через розмикаючі блок - контакти К1.5, К2.5 до однієї зі статорних обмоток електродвигуна. При замиканні будь-якої групи силових контактів відповідний блок-контакт розмикається і конденсатор відключається від електродвигуна.
Після розмикання силових контактів і відключення силової напруги вихідний вал виконавчого механізму зупиняється не відразу, а продовжує протягом деякого часу рух по інерції. Ротор електродвигуна, що при цьому обертається, взаємодіє з залишковим полем статора, наводить у його обмотках деяку генераторну е.р.с.
Блок-контакти пускача підключають до статорної обмотки електролітичний конденсатор, у результаті чого з'являється струм, що наводить у статорі власне магнітне поле. Взаємодія цього поля з ротором створює протидіючий обертанню гальмівний момент, що перешкоджає вибігу виконавчого механізму. Ємність конденсатора підбирається з умови резонансу струмів у замкнутому контурі і залежить від індуктивності статорної обмотки. Так для електродвигуна типу АОЛ потужністю 0,27кВт ємність гальмівного конденсатора при з'єднанні обмоток статора трикутником складає 30 мкФ, а при з'єднанні зіркою - 50 мкФ. Аналогічно для двигунів потужністю 0,4 кВт ємності конденсаторів складають відповідно 60 і 150 мкФ.
Основний недолік контактних пускових пристроїв - їхня невисока надійність. Він виявляється, головним чином, у зношуванні і залипанні контактів пускача. Радикальним засобом підвищення надійності виконавчих пристроїв є застосування безконтактних пускових пристроїв, до яких відносяться тиристорні пускачі.
7.4.2 Пускачі безконтактні реверсивні
Тиристорний пускач У-101. Безконтактний тиристорний пускач У-101 забезпечує реверсивне керування одно- і трифазними асинхронними електродвигунами до 1,1 кВт. У якості силових комутуючих елементів, у цьому пускачі використовуються керовані діоди (тиристори ), що відкриваються при надходженні на вхід пускача керуючої напруги. Оскільки тиристори пропускають струм лише в одному напрямку, для комутації змінної силової напруги кожний тиристор включається в діагональ діодного моста, що утворює схему одного ключа. Пускачі містять чотири тиристорні ключі, що забезпечують реверсування двох фаз силової напруги. Третя фаза не комутується і підключається до електродвигуна через дросель Др2 (рис.7). Керування тиристорами здійснюється за допомогою імпульсів, формованих двома блокінг-генераторами, кожний із який діє на відповідну пару ключів. При відсутності керуючого сигналу блокінг-генератори не формують імпульсів, усі ключі пускача закриті і електродвигун знеструмлений. Керуюча напруга пульсуючого постійного струму 24 В від регулюючого блока при автоматичному керуванні, або від блока живлення при ручному дистанційному керуванні, надходить на вхідні затискачі 7-8 або 9-8, причому "+" підводиться завжди до затискача 8. Якщо керуюча напруга надходить на затискачі 7-8, то на виході блокінг-генератора БГ1 з'являються імпульси напруги, що чергуються, тривалістю близько 60 мкс при частоті проходження близько 3 кГц. Імпульси надходять на керуючі електроди тиристорів, викликаючи їхнє відкриття. Завдяки тому що частота керуючих імпульсів блокінг-генератора значно перевищує промислову частоту комутованої напруги, відкриття тиристорів відбувається на самому початку косого півперіоду напруги. Закриття тиристорів відбувається наприкінці кожного півперіоду, коли силовий струм зменшується до нуля. При зникненні керуючої напруги на вході пускача припиняється генерація імпульсів у блокінг-генераторі, внаслідок чого повторного відкриття тиристорів на початку чергового півперіоду не відбувається, і керований електродвигун відключається.
При надходженні вхідної керуючої напруги на затискачі 9-8 спрацьовує другий блокінг-генератор БГ2, що включає відповідну пару інших тиристорних ключів, що забезпечують реверсування послідовності фаз, на керованому електродвигуні.
Схема вхідних ланцюгів пускача побудована таким чином, що при одночасній появі керуючих сигналів на обох входах блокінг-генератор залишається замкненими.
Ручне дистанційне керування тиристорним пускачем здійснюється від вмонтованого блока живлення з джерелом напруги 24 В. Позитивний потенціал цього джерела постійно підведений до затискача 8, а негативний - виведений на затискач 10, з'єднання якого за допомогою кнопок на оперативному пульті з затискачами 7 або 9 забезпечує ручне керування.
Силовий трансформатор блока живлення підключається первинною обмоткою до тих же фаз, що комутуються тиристорними ключами. При раптовому зникненні мережної напруги на первинній обмотці цього трансформатора може виникнути значна е.р.с. самоіндукції, що виявиться прикладеною до тиристорів. Для захисту тиристорів від викидів напруги цієї е.р.с. служать дросель Др1 і конденсатор С1. Дросель Др2 обмежує швидкість наростання напруги на силових електродах тиристора.
Відсутність блок-контакту у тиристорному пускачі не дозволяє застосовувати найпростіший спосіб електро-конденсаторного гальмування виконавчого механізму. Тому при безконтактному керуванні застосовуються, як правило, фрикційні гальмівні пристрої з електромагнітним приводом, розміщені у виконавчих механізмах типу МЕОБ.
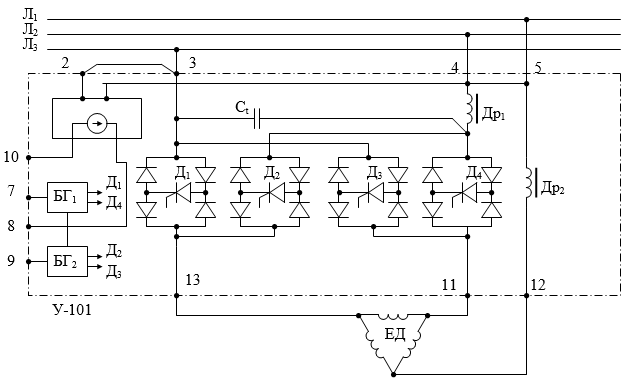
Рис. 7. Електрична схема тиристорного пускача типу У-101 із підключеним двигуном виконавчого механізму
Тиристорні пускачі типу ПБР. Пускачі ПБР-2 (пускач безконтактний реверсивний) призначені для роботи з виконавчими механізмами МЕО, обладнаними асинхронним однофазним конденсаторним електродвигуном типу ДАУ або синхронним реверсивним конденсаторним електродвигуном типу ДСР.
Принцип керування виконавчим механізмом типу МЕО за допомогою пускача ПБР-2 ілюструється схемою, зображеною на рис.8.
Основу пускача складають два тиристорних ключі К1 і К2, що керуються сигналами, що виробляються регулюючими блоками або оператором. Кожний із тиристорних ключів включений в коло живлення однієї зі статорних обмоток електродвигуна.
При відсутності керуючих сигналів тиристорні ключі розімкнуті, обмотки електродвигуна знеструмлені.
При подачі керуючого сигналу "Менше" (М) закривається тиристорний ключ К1, і до обмотки О1 підключається джерело живлення (мережа 220 В, 50 Гц). До іншої обмотки напруга живлення надходить через конденсатор С, що зсуває фазу. Електродвигун обертається в напрямку "Менше".
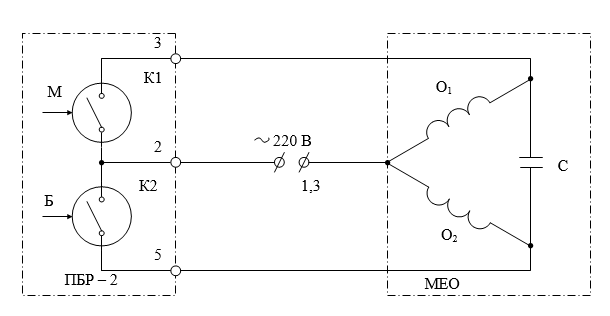
Рис. 8. До пояснення способу керування ЕВМ за допомогою тиристорного пускача типу ПБР-2
Для вмикання електродвигуна в протилежному напрямку необхідно замкнути тиристорний ключ К2 шляхом подачі керуючого сигналу "Більше" (Б). При цьому до джерела живлення підключається обмотка О2 безпосередньо, а обмотки О1 - через фазозсувний конденсатор. Фазовий зсув між напругами, підведеними до обмоток, змінює знак, у результаті чого відбувається реверс електродвигуна.
Таким чином, в аналізованій схемі немає розходження в засобах живлення статорних обмоток О1 і О2 : кожна з них у залежності від необхідного напрямку обертання може підключатися до джерела живлення як безпосередньо, так і через фазозсувний конденсатор. Тому обидві статорні обмотки електродвигуна, що працює з пускачами ПБР-2, повинні бути ідентичні.
При керуванні виконавчими механізмами МЕО за допомогою магнітних підсилювачів УМД (таке керування в даний час практично не застосовується) статорні обмотки електродвигунів включаються по-різному. Одна обмотка (збудження) підключається постійно до мережі через фазозсувний конденсатор, інша обмотка (керування) - до джерела живлення безпосередньо. Реверсування електродвигуна здійснюється зміною на 180о фази напруги, що підводиться до обмотки керування. У цьому випадку режим роботи обмоток має певні розходження, внаслідок чого самі обмотки (керування і збудження) виконувалися неоднаковими.
У зв'язку із переходом від магнітних підсилювачів типу УМД до тиристорних пускачів ПБР-2 у конструкції виконавчих механізмів МЕО зроблені відповідні зміни. Виконавчі механізми (модифікація МЕО) комплектуються електродвигунами типу ДАУ із симетричними обмотками, розрахованими на керування від пускачів ПБР-2 по розглянутій раніше схемі.
Принципова електрична схема пускача з підключеним до нього електродвигуном зображена на рис. 9. (для модифікації пускача ПБР-2-1, розрахованого на керування пасивним вхідним сигналом).
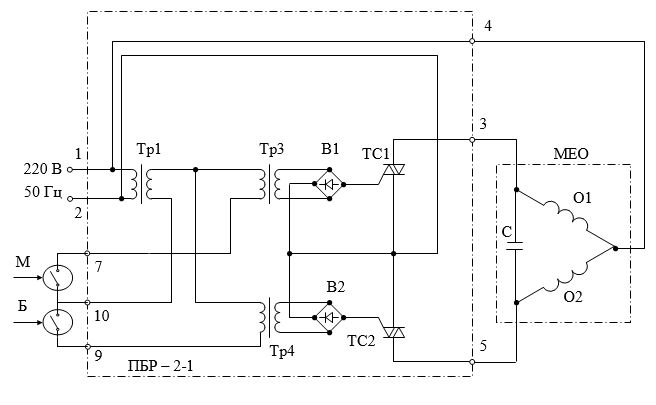
Рис.9. Принципова електрична схема тиристорного пускача типу ПБР-2 із підключенням двигуна ЕВМ.
Функції безконтактних ключів, що здійснюють комутацію силових ланцюгів електродвигуна, виконують симетричні тиристори (семістори) ТС1 і ТС2.
Вмикання семісторів відбувається шляхом подачі негативної напруги, продукованої за допомогою випрямлячів В1 і В2. Напруга на ці випрямлячі надходить відповідно із розділювальних трансформаторів Тр3 і Тр4 при наявності командного сигналу у вигляді замикання відповідної пари затискачів.
Замикання затискачів 7-10 викликає включення семістора ТС1 і відповідне спрацьовування виконавчого механізму в напрямку "Менше", а замикання затискачів 9-10 - включення ТС2 і спрацьовування механізму в напрямку "Більше".
Замикання зазначених затискачів пускача може відбуватися вихідними ключами регулюючих блоків або кнопками ручного дистанційного керування. Трансформатор Тр розділяє керуючі і силові ланцюги.
Відключення семісторів відбувається після зняття командного сигналу в момент переходу синусоїдального струму навантаження через нуль.
Пускачі типу ПБР-2 мають три модифікації, що різняться способом керування. На рис. 10 показані способи керування пускачем ПП за допомогою активного (а) і пасивного (б) сигналів.
Активний сигнал керування - постійна або пульсуюча напруга 24В знімається з виходу регулюючого блока РБ (затискачі 7-8, 8-9).
Пасивний сигнал формується блоком керування БУ за допомогою замикання відповідних кнопок або ключів (затискачі 7-10, 9-10). Енергія, необхідна для спрацьовування пускового пристрою ПУ, надходить від джерела, що міститься в самому пускачі. Пасивний сигнал застосовується, в основному, при ручному дистанційному керуванні.
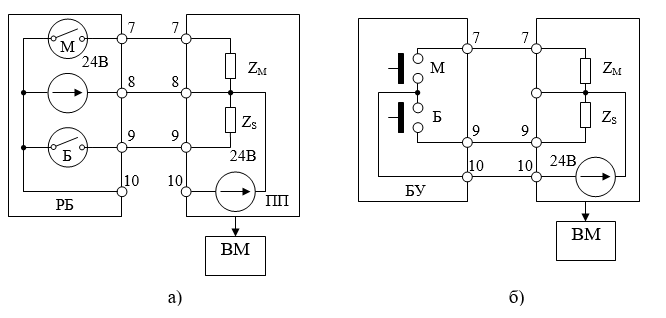
Рис. 10. Способи керування пусковим пристроєм
Пускач ПБР-2-1 розрахований на керування пасивним сигналом і не містить виходу для електромагнітного гальма, тобто застосовується з ЕВМ, що мають механічне гальмо.
Пускач ПБР-2-2 може керуватися як активним, так і пасивним сигналом.
Пускач ПБР-2-3 на відміну від ПБР-2-2 має ще вихід для керування електромагнітним гальмом виконавчого механізму МЕО. При подачі на вхід пускача керуючого сигналу будь-якої полярності ("Більше", "Менше") крім основного силового сигналу для включення двигуна подається також сигнал для спрацьовування електромагніта і розгальмовування вихідного вала виконавчого механізму.
7.4.3 Дистанційні вказівники положення
Для дистанційного контролю положення регулюючого органа використовуються вказівники положення, встановлювані на пульті або на щиті керування.
Дистанційний вказівник положення типу ДУП-М застосовується для вказівки положення вала ЕВМ, що має реостатний або індуктивний давач. На рис. 11(а) зображена схема включення вказівника положення УП із реостатним давачем ДР. Останній включається в ланцюг постійного струму (трансформатор Тр, випрямний міст Д1-Д4). Повзунок давача жорстко сполучений із вихідним валом двигуна і стежить за його переміщенням. Послідовно з повзунком давача включений вказівник положення УП (міліамперметр) і регулювальної опір R, за посередництвом якого встановлюється вказівник на позначку 100% при заданому куті повороту вала. Нульове положення вказівника встановлюється за допомогою механічних тяг. На рис. 11(б) зображена схема включення вказівника положення з індуктивним давачем ДИ. Переміщення сердечника, пов'язаного з валом двигуна, викликає розбаланс мостової схеми, у вимірювальну діагональ якої включений вказівник положення УП. Для роботи з диференційно-трансформаторними (індуктивними) давачами застосовуються індикатори положення уніфіковані типу ІПУ.
У схемах регулювання, виконаних на апаратурі АКЭСР і КАСКАД, для візуального контролю струмового сигналу 0-5 мА від давачів положення виконавчих механізмів (шкала 0 -100), а також для контролю розузгодження на вході регулюючих блоків (шкала 25-0-25) використовуються вказівники типу В-12.
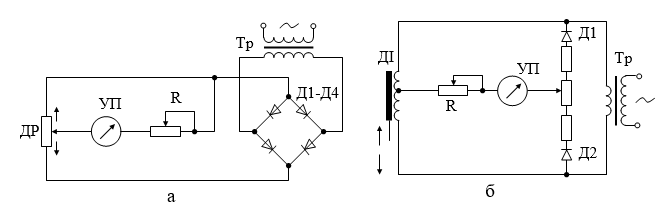
Рис. 11. Принципові електричні схеми підключення давачів положення:
а - реостатного (ДР); б - індуктивного (ДІ)
7.4.4 Блоки керування.
Для керування ЕВМ із реостатними і диференційно-трансформаторними давачами застосовуються блоки керування БУ1/6, БУ2/6. Блок БУ2/6 відрізняється від БУ1/6 відсутністю задавача.
Для керування виконавчими механізмами типу МЕО в комплекті АКЭСР використовують блоки керування типу БРУ.
Блок БРУ-22 призначений для ручного або дистанційного переключення ланцюгів керування на два положення і світлової сигналізації положення ланцюгів за допомогою світлодіодів вмонтованих у клавіші кнопок керування: Б - "Більше" і М - "Менше".
Блок БРУ-32 виконує такі операції: ручне переключення з автоматичного режиму керування на ручний і навпаки; кнопкове керування "Більше", "Менше" виконавчими пристроями, світлову індикацію вихідного сигналу регулюючого пристрою "Менше", "Більше" з імпульсним вхідним сигналом, визначення положення регулюючого органа.
БРУ-42 виконує ті ж функції, що і блок БРУ-32, але крім ручного переключення з автоматичного режиму керування на ручний і обернено дозволяє переключати ці режими дистанційно.
Положення регулюючого органа на блоках БРУ-32, БРУ-42 визначається по вмонтованому в блок стрілочному індикатору, вхідними сигналами якого є сигнали постійного струму 0-1, 0-5 мА і 0-10 В.
Для керування в комплекті апаратури регулювання КАСКАД і КОНТУР застосовуються блоки керування типу БУ12 - для аналогового керування і БУ21 - для релейного керування. За допомогою фіксуючих кнопок блоки керування БУ12, БУ21 забезпечують переключення вихідних ланцюгів регулюючого блока з автоматичного керування на ручне і навпаки. Комутація ланцюгів ручного керування провадиться кнопками "Більше", "Менше" у блоці БУ21. У блоці БУ12 ручне керування струмом навантаження здійснюється вмонтованим джерелом 0-5 мА.
7.5 Порядок роботи
1. Ознайомитися з будовою і принципом роботи наявних на лабораторних стендах виконавчих механізмів і допоміжних пристроїв (пускачів, блоків керування, дистанційних вказівників положення).
2. Скласти принципову електричну схему керування заданим виконавчим механізмом.
3. Скласти принципову електричну схему дистанційного визначення положення вала виконавчого механізму.
4. Зібрати схеми керування виконавчими механізмами, приведені на рис. 12.
5. Узгодити напрямок обертання вала виконавчого механізму з положенням кінцевих вимикачів; налагодити кінцеві вимикачі на заданий діапазон переміщення вала виконавчого механізму.
6. Налагодити вказівник положення на заданий діапазон переміщення валу виконавчого механізму.
7. Визначити середній час повороту вихідного валу з одного крайнього положення в інше згідно формули:
де τ1, τ2 - час повороту вихідного вала відповідно при прямому й оберненому ході, виміряний секундоміром.
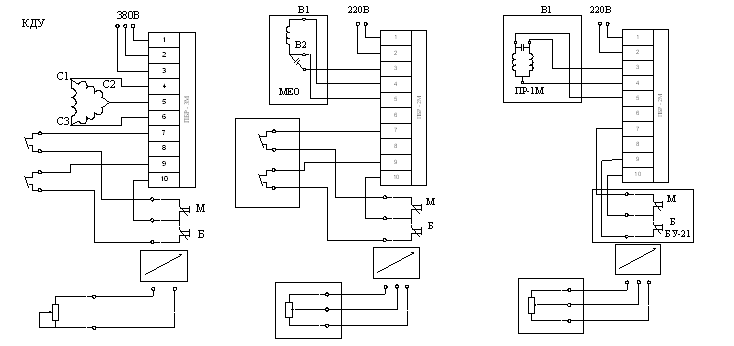
Рис.12. Схеми керування електричним
виконавчим механізмом типу МЕО
7.6 Контрольні запитання
1. Поясніть реакцію ЕВМ постійної швидкості на імпульсний сигнал регулятора.
2. Розповісти про електричні виконавчі механізми - однообертові, багатообертові, та їхні нормовані параметри.
3. Розповісти про гальмівні пристрої (електромагнітні, конденсаторні).
4. Розповісти про виконавчі механізми ИМТМ, ПР.
5. Розповісти про електромагнітні виконавчі механізми.
6. Намалюйте і поясните схему включення магнітного контактора. Чим різняться магнітний контактор і магнітний пускач?
7. Пояснити електричну схему тиристорного пускача.
8. Поясніть спосіб керування ЕВМ за допомогою тиристорних пускачів У-101, ПБР-2.
9. Розкрийте суть понять "активний сигнал керування", "пасивний сигнал керування".
10. Розповісти про дистанційні вказівники положення і блоки керування.
На початок сторінки