Лабораторна робота № 11
Тема. Аналіз і синтез систем
автоматичного управління методом кореневого годографа
Мета роботи: навчитися будувати в
MATLAB кореневі годографи систем автоматичного
управління, аналізувати за цими годографами поведінку систем і
використовувати їх для синтезу регуляторів.
Кореневий годограф – це траєкторії
коренів характеристичного рівняння системи на комплексній площині при зміні
якого-небудь параметра системи.
Алгоритм побудови кореневого годографа
наступний:
1. Визначення
передавальної функції системи:
– Записати
передавальну функцію відкритої системи G(s)H(s), де G(s) – передавальна функція
прямого каналу, а H(s) – зворотного
зв’язку.
–
Виділити чисельник і знаменник функції.
2. Знаходження
полюсів і нулів:
–
Визначити полюси — корені знаменника G(s)H(s) (прирівняти
знаменник до нуля).
–
Визначити нулі — корені чисельника G(s)H(s) (прирівняти
чисельник до нуля).
–
Позначити кількість полюсів (n) і нулів (m).
3. Позначення
початкових і кінцевих точок:
–
Відзначити, що годограф починається в полюсах (при K=0).
–
Вказати, що годограф закінчується в нулях (при K→∞),
або в нескінченності, якщо n>m.
4.
Визначення ділянок на дійсній осі:
–
Вибрати тестову точку на дійсній осі.
–
Підрахувати кількість полюсів і нулів праворуч від неї (сума
повинна бути непарною для належності до годографа).
–
Повторити для всіх ділянок між полюсами і нулями, щоб знайти
частини дійсної осі, що належать годографу.
5. Розрахунок
асимптот:
–
Обчислити центр асимптот: 
–
Визначити кути асимптот:  , k=0,±1,±2
, k=0,±1,±2
–
Відзначити, що асимптоти потрібні, якщо n>m.
6. Знаходження
точок відриву і приєднання:
–
Скласти характеристичне рівняння: 1+KG(s)H(s)=0
–
Виразити K як функцію від s: K=−1G(s)H(s)
–
Взяти похідну dK/ds і прирівняти до нуля, щоб знайти точки відриву або
приєднання.
–
Розв’язати отримане рівняння для визначення координат цих точок.
7. Визначення
перетину з уявною віссю:
–
Підставити s=jω в характеристичне рівняння.
–
Розділити на дійсну та уявну частини.
–
Розв’язати систему рівнянь для знаходження значень ω і
відповідного K, де годограф перетинає уявну вісь.
8.
Побудова гілок годографа:
–
Накреслити полюси (хрестиками) і нулі (кружечками) на
комплексній площині.
–
Позначити ділянки на дійсній осі, що належать годографу.
–
Накреслити асимптоти, що виходять із центра асимптот під
розрахованими кутами.
–
З’єднати полюси з нулями або асимптотами, враховуючи точки
відриву/приєднання та симетрію відносно дійсної осі.
–
Додати стрілки, що показують напрямок руху коренів при зростанні
K.
9. Перевірка
стійкості:
–
Визначити діапазон K, при якому всі корені лежать у лівій
півплощині (система стійка).
–
Використати перетин з уявною віссю як межу стійкості.
10. Оформлення
результатів:
–
Накреслити остаточний вигляд годографа.
–
Вказати критичні значення K і відповідні точки на графіку.
Нехай
необхідно дослідити систему. Для дослідження
скористаємось Matlab, лістинг 1
Лістинг 1 – Код програми
% 1. Задаємо систему: G(s) = K / (s * (s+2) * (s+4))
num = [1]; % Чисельник (K)
den = [1 6 8 0]; % Знаменник (s^3 + 6s^2 + 8s)
sys = tf(num, den);
% 2. Будуємо кореневий годограф
базової системи
figure(1);
rlocus(sys); % годограф
title('Кореневий годограф базової системи'); % Назва
xlabel('Re(s)');
ylabel('Im(s)');
grid on;
% 3. Порівняння замкнених систем
із різними K
K_values = [10, 30, 48]; % Різні
значення K для порівняння
figure(2);
hold on;
for i = 1: length(K_values)
K = K_values(i); % Беремо поточне значення K
sys_K = tf([K], den); % Система з фіксованим K
sys_closed = feedback (sys_K, 1); % Замкнена система
step (sys_closed, 10); % Малюємо перехідну характеристику до 10 секунд
end
% Налаштування графіка
title('Перехідні характеристики для різних K');
xlabel('Час (с)');
ylabel('Амплітуда');
grid on;
hold off;
% 4. Порівняння коренів на
комплексній площині для різних K
figure(3);
hold on;
for i = 1:length(K_values)
K = K_values(i); %
Беремо поточне значення K
sys_K = tf([K], den); % Система з
фіксованим K
sys_closed = feedback(sys_K, 1);
poles = pole(sys_closed);
plot(real(poles), imag(poles)); % корені
end
% Налаштування графіка
title('Положення коренів для різних K');
xlabel('Re(s)');
ylabel('Im(s)');
grid on;
hold off;
____________________________________________________________________
Кінець лістингу 1
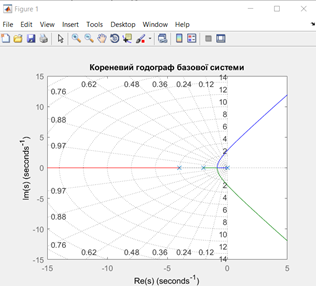
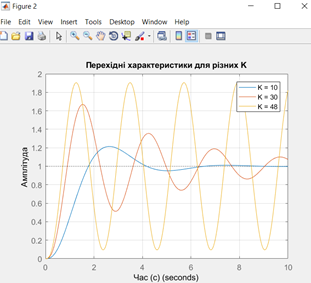
Рисунок 1 – Побудова кореневого годографа та
перехідних характеристик при різних значеннях k
У ході виконання лабораторної роботи було проаналізовано
перехідні характеристики (рис.1):
1. При K=10: перехідна характеристика демонструє повільну реакцію системи з
помітним часом встановлення. Амплітуда вихідного сигналу поступово наближається
до одиниці без значних коливань, що свідчить про стійку поведінку з великим
запасом стійкості. Корені замкненої системи розташовані далеко в лівій
півплощині, що забезпечує аперіодичний характер перехідного процесу.
2. При K=30: зі збільшенням K до 30 перехідна
характеристика показує швидшу реакцію системи, однак з’являються слабкі
коливання. Час встановлення зменшується, але перерегулювання стає помітним. Це
вказує на наближення коренів до уявної осі, що зменшує демпфування і робить
систему більш динамічною, але все ще стійкою.
3. При K=48: перехідна характеристика при K=48
характеризується вираженими коливаннями, які не затухають у часі. Амплітуда
сигналу коливається навколо одиниці з постійною величиною, що свідчить про
досягнення межі стійкості. Положення коренів на уявній осі підтверджує, що
система перебуває в критичному стані, де будь-яке подальше збільшення K призведе до нестійкості.
Отже, аналіз перехідних характеристик показав, що збільшення
коефіцієнта підсилення K прискорює реакцію системи, але одночасно
знижує її запас стійкості. Оптимальне значення K залежить від вимог до швидкості відгуку та
допустимого рівня коливань. Для даної системи K=30може
бути компромісним вибором, забезпечуючи швидшу реакцію порівняно з K=10, але уникаючи нестабільності, характерної для K=48.
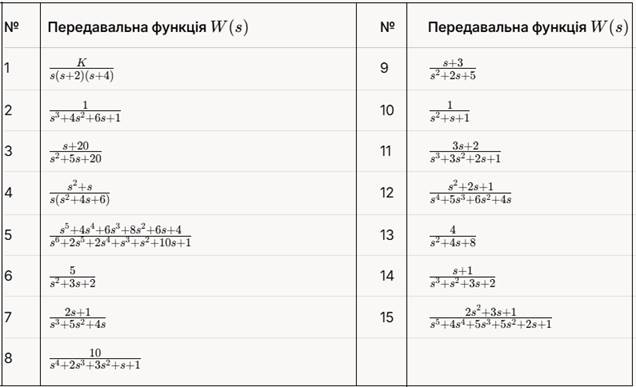
Завдання для виконання
Побудуйте кореневий годограф системи, при
0<К<∞ у для приведених нижче передатних функцій, що подані в
таблиці 1
Таблиця 1 – Варіанти завдань.
![]()
![]()