Лекція 3. Системи керування мехатронними пристроями
Системи керування мехатронними засобами – це системи, які
призначені для формування та видачі керуючих завдань виконавчому пристрою,
відповідно до заданої програми.
В загальному випадку система автоматичного керування (рис. 3.1) складається
з: об'єкта керування (ОК), вимірювального пристрою (ВП), задаючого пристрою
(ЗП), сумуючого пристрою, підсилювача (П) і виконавчого механізму (ВМ).
Рис. 3.1 Загальна структурна схема САК
Як приклад системи керування мехатронним об'єктом
розглянемо підсистему керування сучасним автомобілем – визначення дистанції
безпеки і швидкості (рис. 3.2). Ця технологія забезпечує можливість керувати
відстанню між транспортним засобом і перешкодою (або іншим транспортним засобом)
інтегруючи датчик cruise control і ABS systems. Структурна реалізація даної
підсистеми керування показана на рис. 3.3.
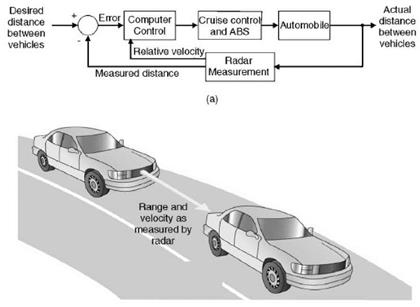
Рис. 3.2 Підсистема
керування сучасним автомобілем – cruise control
и ABS systems (Robert H. Bishop [1, 2])
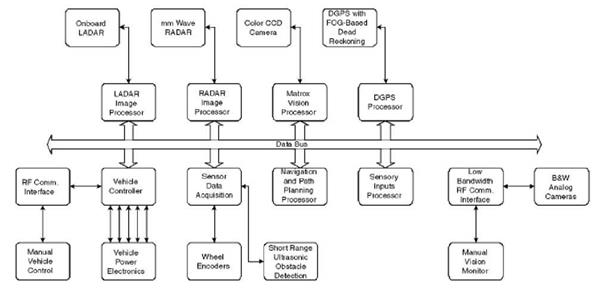
Рис. 3.3 Структурна реалізація
підсистеми керування автомобілем (Robert H. Bishop [1, 2])
Рисунок 3.4 показує типову механотрону систему з
механічними, електричними, і комп'ютерними компонентами. Процес системного
збору даних починається з виміру фізичного значення датчиком. Датчик здатний
виміряти деякий сигнал, у формі рівня напруги або форми хвилі.
Рис. 3.4 Система керування мехатроним об’єктом (Robert
H. Bishop [1, 2])
Цей аналоговий сигнал посилають аналого-цифровий
конвертер (аналого-цифровий перетворювач). Зазвичай використовуючи процес
послідовного наближення, аналого-цифровий перетворювач відображає аналоговий
вхідний сигнал на цифровий пристрій виводу. Це цифрове значення складено з
набору подвійних значень названих бітами (представлене з 0 і 1). Набір бітів
представляє десяти або шістнадцяти числовий номер, який може використовуватися
мікроконтролером. Мікроконтролер складається з мікропроцесора плюс пам'ять та
інші доступні пристрої. Програма в мікропроцесорі використовує це цифрове
значення поряд з іншими уведеннями та попередньо завантаженими значеннями
названими калібруваннями, щоб визначити команди виводу. Подібно введенню на
мікропроцесор, ці висновки знаходяться в цифровій формі і можуть бути
представлені набором бітів. Цифро-аналоговий конвертер (ЦАП) використовується,
щоб конвертувати цифрове значення в аналоговий сигнал. Аналоговий сигнал
використовується приводом головок для керування фізичними пристроями або для
впливу на фізичне середовище. Датчик виробляє нові виміри і повторюється процес,
таким чином, щоб завершити цикл керування зі зворотним зв'язком. Синхронізація
для цієї повної операції здійснюється з допомогою годинника.
Проектувальник, перед яким стоїть завдання синтезу
високоякісної системи в умовах значної невизначеності змушений шукати рішення в
класі роботизованих систем. Методи синтезу систем управління припускають, що
моделі об'єкта і регулятора відомі, і вони мають постійні параметри. Однак
модель реальної фізичної системи завжди буде неточною з наступних причин:
– зміна параметрів в силу тих чи інших обставин;
– динамічні властивості, не враховані в моделі;
– не враховане запізнювання часу;
– зміна положення робочої точки (положення рівноваги);
– шум датчика;
–
непередбачувані зовнішні обурення.
Метою синтезу роботизованої системи є гарантія необхідної
якості незалежно від похибок і зміни параметрів моделі. Система, яка має
допустимі зміни якості при зміні або неточності її моделі, називається
роботизована.
Роботизована система керування має необхідну якість
незважаючи на істотну невизначеність характеристик об'єкта керування.
Структура системи, яка включає потенційні невизначеності,
зображена на рис. 3.5. Дана модель враховує шум датчика N (8), непередбачуване
заперечення 0 (8) і об'єкт керування 0 (8) з неврахованою динамікою або
параметрами, схильними до зміни. Всі ці фактори можуть бути дуже значними, тому
проблема полягає в тому, щоб система, яка синтезується, зберігала бажану
якість.
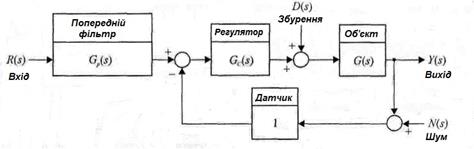
Рис. 3.5. Структура роботизованої системи керування
Роботизована система повинна (1) мати низьку чутливість, (2)
зберігати стійкість і (3) задовольняти вимоги, що ставляться до її якості, у
досить широкому діапазоні зміни параметрів. Суть терміну роботизованість
полягає в чутливості системи до факторів, які не враховувалися на етапах аналізу
і синтезу – наприклад, збурення, шум
датчика, що впливає на її динаміку, які не показані в моделі системи
параметрів. Система повинна мати здатність протидіяти впливу цих факторів при
виконанні завдань, заради яких вона проектувалася.
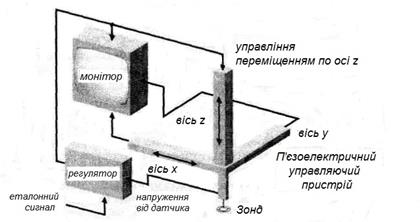
Система керування позиціонуванням тунельного мікроскопа повинна бути точною
до порядку нанометрів. Одним з основних її елементів є п’езодатчик, який змінює
свій розмір залежно від наданої напруги до кристалу. «Апаратура» тунельного
мікроскопа забезпечується найтоншим вольфрамовим зондом, кінець якого заточений
так, що він може складатися тільки з одного-єдиного атома і мати ширину 0,2 нм.
п'єзоелектрична система керування
підводить кінець зонда до поверхні провідникового зразка на відстань
одного-двох нанометрів – так близько, що електронні хмари атома на кінці зонда
і найближчого до нього атома зразка частково перекриваються. Датчик зворотного
зв'язку визначає зміну тунельного струму і перетворює його в напругу, яка
використовується для керування переміщенням по осі г. П'єзоелектричний керуючий
пристрій переміщує зонд по вертикалі так, щоб стабілізувати тунельний струм і
підтримувати постійним зазор між кінцем зонда і поверхнею зразка.
Система керування положенням зонда зображена на рис. 3.6, (а),
а її
структурна схема приведена в частині (б) цього малюнка.
Всі системи автоматичного керування
діляться за різними ознаками на такі основні класи.
1. За основними видами рівнянь
динаміки процесів керування:
а) лінійні системи;
б) нелінійні системи.
а) |
|
б) |
Рис.
3.6. Система керування тунельним мікроскопом (а), структурна схема (б)
2. Залежно від коефіцієнтів рівнянь і виду рівнянь як
лінійні, так і нелінійні системи поділяються на:
а) системи, які описуються
звичайними диференціальними рівняннями з постійними коефіцієнтами;
б) системи, які описуються
звичайними диференціальними рівняннями зі змінними коефіцієнтами;
в) системи, які описуються
рівняннями окремих похідних;
г) системи з запізненням, які
описуються рівняннями з затримкою аргументу.
3. За характером виведення сигнали
розрізняють:
а) безперервні системи;
б) дискретні системи, серед яких виділяють імпульсні,
релейні, цифрові.
4. За
характером процесів керування:
а) детерміновані системи – системи з певними змінними і
процесами;
б) стохастичні системи – системи з
випадковими змінними і процесами.
5. За
характером функціонування.
Залежно від того, за яким законом
змінюється задане значення регульованої величини, системи автоматичного
керування поділяються на:
а) системи стабілізації, які
підтримують стабільність регульованої величини;
б) системи програмного регулювання,
в яких задане значення регульованої величини змінюється за певною, заздалегідь
вибраною, тимчасовою програмою;
в) слідкуючі системи, в яких задане
значення регульованої величини змінюється відповідно до стану деякого заданого
вектора змінних у часі;
г) системи оптимального керування, в
яких показник ефективності залежить не тільки від поточних значень координат,
як в екстремальному регулюванні, але й, також, від характеру їх зміни в минулому,
теперішньому і майбутньому, і виражається деяким функціоналом. Знаходження
оптимального керування передбачає вирішування досить складної математичної
задачі відповідними методами, крім того, органічною складовою частиною системи
є комп'ютер;
д) адаптивні системи, в яких
автоматично змінюються значення в зворотному напрямі, власні параметри або
структура при непередбачених змінах зовнішніх умов на підставі аналізу стану
або поведінки системи так, щоб зберігалася задана якість її роботи. Системи зі
зміною заданого значення регульованої величини називають екстремальними, зі
зміною параметрів – самоналаштуванням, зі зміною структури – самоорганізовані.

